


Magnetic manipulation of liquid metals for soft robotics
 0
0 Abstract
Soft robots harness compliant materials and bio-inspired architectures to achieve safe, adaptive, and versatile functions in dynamic environments, enabling applications in minimally invasive surgery, wearable assistive devices, and confined-space exploration. Gallium-based liquid metals with metallic conductivity and liquid deformability constitute a transformative material platform for creating soft robots with enhanced performance and diverse manipulation strategies. Among them, magnetic manipulation is particularly attractive because it enables remote, non-contact, and energy-efficient control with high spatial precision. In this review, we summarize existing strategies for the preparation, integration, and patterning of magnetic liquid metals. We then illustrate the mechanisms of magnetic manipulation, including magnet and Lorentz force manipulation, and discuss the potential of multi-field manipulation. Furthermore, we systematically categorize the practical applications of magnetically actuated liquid metals in soft robotics into four types: droplet, slurry, particle, and composite, based on their composition and morphology. Finally, we highlight the key challenges in this field and provide perspectives on future research directions. This review aims to establish a systematic framework for understanding and advancing magnetically manipulated liquid metals in soft robotics, offering fundamental insights to stimulate interdisciplinary research and accelerate technological breakthroughs in this emerging field.
Keywords
INTRODUCTION
Soft robots represent a transformative paradigm in robotics, leveraging compliant materials and bioinspired architectures to achieve unprecedented adaptability in dynamic environments[1-5]. Unlike rigid robots, soft robots exploit continuum-body deformation and distributed actuation mechanisms to emulate biological behaviors such as the multi-degree-of-freedom manipulation of the octopus[6-8]. Moreover, their inherent mechanical compliance enables safe interaction with fragile objects such as biological tissues and resilience to collisions, while embodied intelligence allows environment-responsive motions without complex control algorithms. Consequently, soft robots enable diverse and promising applications, including minimally invasive surgery, confined-space search-and-rescue operations, and next-generation wearable assistive devices[9-11]. Furthermore, soft robotics draws on advances in soft matter physics and flexible electronics to address key challenges such as efficient actuation, scalable design, and adaptive control. Ultimately, these developments envision robots that can integrate more naturally with living systems, particularly the human body.
In recent years, liquid metals (LMs), particularly gallium-based alloys such as eutectic gallium-indium (EGaIn) and gallium-indium-tin alloy (Galinstan), have emerged as a promising class of functional materials for soft robotics[12-16]. LMs uniquely combine excellent adaptability of liquids with high electrical and thermal conductivity of conventional metals, thereby offering a set of properties that are rarely observed in a single material system. For instance, LMs remain fluid at or near room temperature, enabling extreme deformability, self-healing capability, and conformability suited to complex geometries of the LM soft robots[17,18]. The metallic-level conductivity allows their use in electrically controlled soft robots as stretchable conductors, electrodes, and interconnects, with reliable signal transmission and efficient power delivery even under large deformations[19-21]. Meanwhile, the high thermal conductivity makes LMs suitable for heat dissipation and thermal management within soft robots, particularly in thermally driven modules and high-power electronics[22,23]. Moreover, their facile processability and good compatibility further broaden their utility, facilitating the development of multifunctional and highly integrated soft robots[12]. Specifically, LMs can be patterned and integrated with a wide range of soft substrates (e.g., elastomers and hydrogels) using techniques such as direct injection, printing, or mixing[24-26]. These composite structures endow soft robotic systems with additional capabilities such as multi-stimuli responsiveness[12,27-30]. Unlike conventional mercury with high toxicity, gallium-based LMs show good biocompatibility potential for biomedical applications[31-34]. Taken together, these comprehensive advantages position LMs as transformative materials in advancing the performance, durability, and functionality of next-generation soft robotic systems.
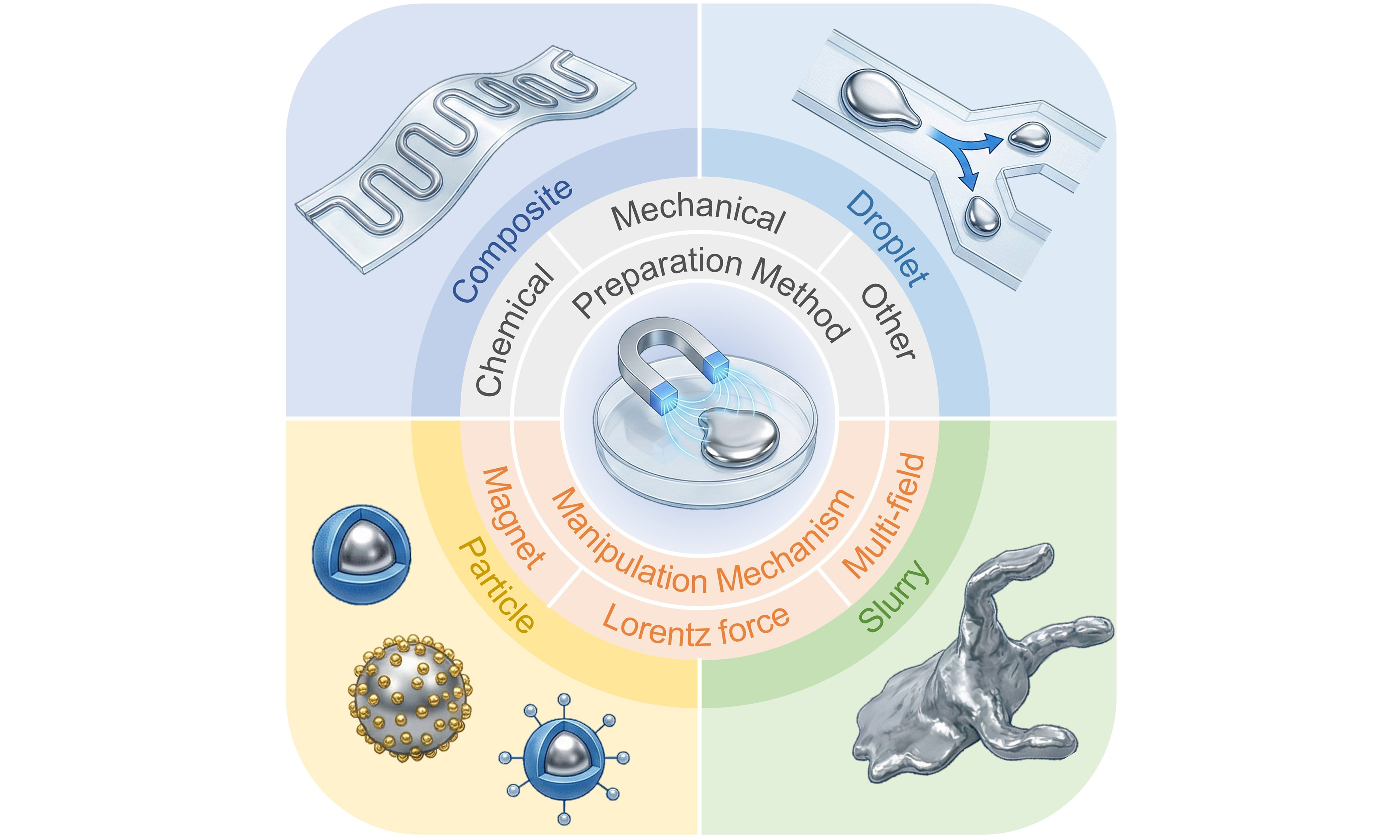
These unique properties of LMs enable their versatile manipulation in soft robots through various methods[14]. For example, large deformation and directional locomotion can be achieved through electrochemical oxidation[35-38], Marangoni flow[39,40], and magnetic manipulation[41-44]. Electrochemical oxidation enables manipulation of LM by applying voltages to form surface oxidation and thus control surface tension and morphology[35-38]. Marangoni flow drives the motion of the LM droplet, which is generated by a surface tension gradient resulting from the asymmetric charge distribution under an applied electric field[39,40]. Magnetic manipulation controls the movement and deformation of LM using external magnetic fields, acting on either pre-added magnetic particles or internal currents[41-43]. Among various manipulation methods, magnetic manipulation demonstrates unique comprehensive advantages and has attracted significant research interest[1,41,42,45]. For instance, our previous work employed magnetic manipulation to pattern LM to create flexible electronics, even on nonplanar substrates or within confined spaces[46]. The first advantage of magnetic manipulation is remote and non-contact manipulation with high spatial precision, allowing for complex deformation and locomotion without bulky mechanical connections[47,48]. This is particularly attractive in confined environments such as the human body, where tethered actuation is impractical. Second, magnetic manipulation is energy-efficient and rapid, since the interaction between magnetic fields and inside current or embedded magnetic components can provide instantaneous force transmission[49]. Third, magnetic manipulation allows for scalable and programmable control through tailored field gradients or dynamic field modulation, enabling sophisticated functionalities like reversible shape-morphing, droplet splitting/merging, and collective behaviors in miniature LM soft robots[50]. Additionally, this method exhibits excellent biocompatibility, since moderate magnetic fields are non-ionizing and pose minimal risk to biological tissues, making it suitable for biomedical applications such as targeted drug delivery and minimally invasive surgery[47,48]. The unique advantages of magnetic manipulation position it as a promising strategy for LM soft robots, a prospect that has attracted growing attention and some recent reviews[41-43]. While these earlier reviews primarily categorize magnetic manipulation of LMs by application scenarios (e.g., flexible electronics and soft robotics), our review adopts a fundamentally different perspective. Here, we propose a type-oriented classification framework that systematically links distinct forms of LMs (i.e., droplet, slurry, particle, and composite) with their corresponding characteristics, functionality, and applications [Figure 1]. This approach offers a more actionable basis for selecting or engineering LM materials for targeted magnetic manipulation. In addition, distinct from earlier overviews prioritizing direct magnet-particle interactions, our review highlights the pivotal role of Lorentz force mechanisms in magnetically manipulated LM systems. These changes expand the scope of the discussion on mechanisms of magnetic manipulation and practical applications.
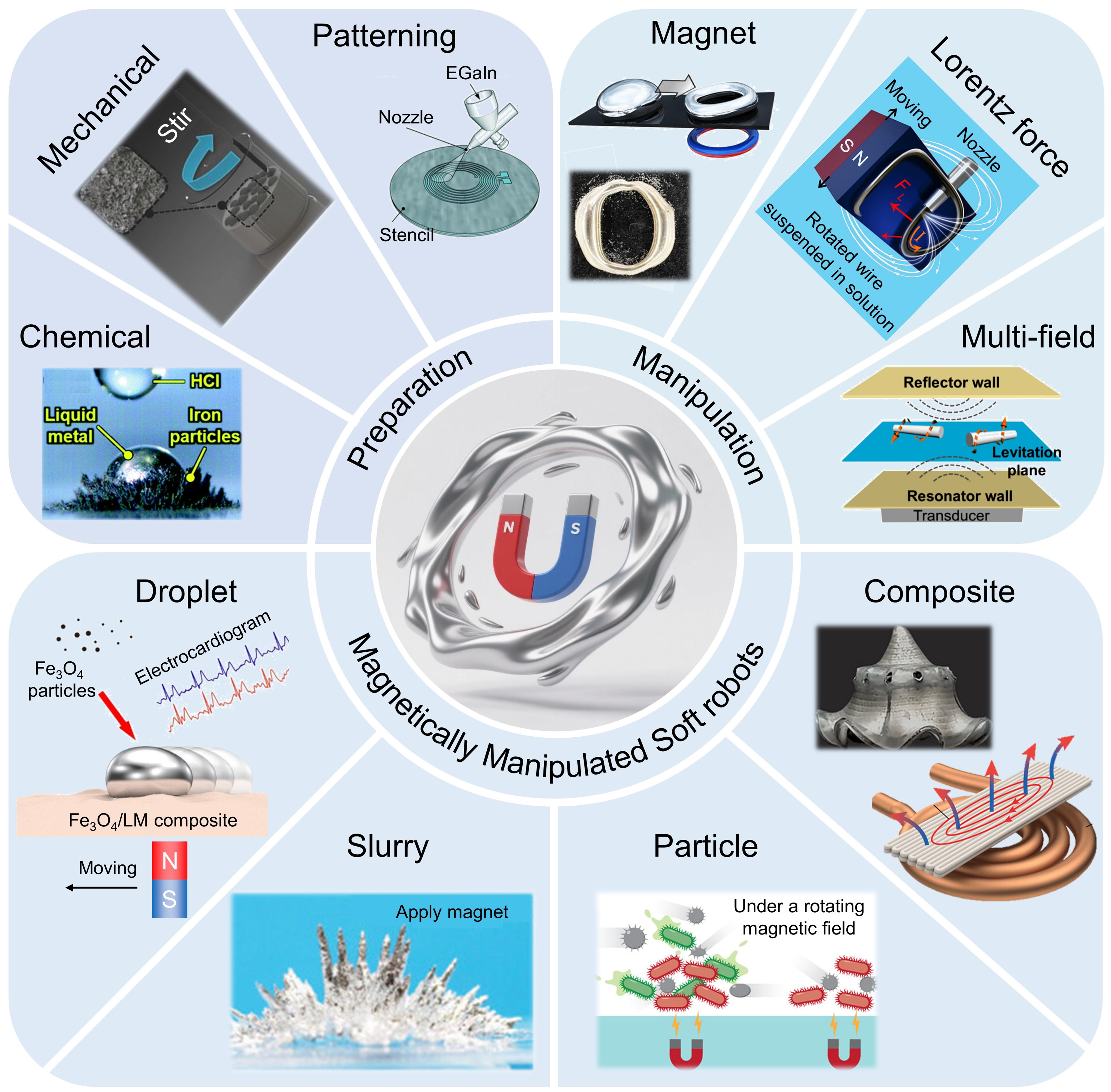
Figure 1. Schematic illustrations of preparation methods, magnetic manipulation, and soft robotic applications across four categorized types of liquid metals (i.e., droplet, slurry, particle, and composite). Preparation methods including chemical[51], mechanical[52], and patterning[53]. Reprinted with permission[51]. Copyright 2019, Royal Society of Chemistry; Reprinted with permission[52]. Copyright 2018, John Wiley and Sons; Reprinted with permission[53]. Copyright 2017, Royal Society of Chemistry. Manipulation mechanisms including magnet[54], Lorentz force[55] and multi-field[56]. Reprinted with permission[54]. Copyright 2023, Springer Nature; Reprinted with permission[55]. Copyright 2022, National Academy of Sciences; Reprinted with permission[56]. Copyright 2018, American Chemical Society. Soft robots including composite[57], particle[58], slurry[59] and droplet[60] type. Reprinted with permission[57]. Copyright 2024, John Wiley and Sons. Reprinted with permission[58]. Copyright 2020, American Chemical Society; Reprinted with permission[59]. Copyright 2021, John Wiley and Sons; Reprinted with permission[60]. Copyright 2023, American Chemical Society. The elements shown in this figure are representative examples intended to aid understanding and are not meant to be exhaustive.
In this review, we systematically discuss the magnetic manipulation of LM for soft robots, encompassing material preparation, manipulation mechanisms, and practical applications [Figure 1]. First, we summarize methods for preparation of magnetic liquid metal (MLMs), integration of MLMs with other soft materials, and patterning of LMs. Then, different mechanisms for magnetic manipulation of LMs, including magnet manipulation and Lorentz-force manipulation, are presented and compared. In addition, multi-field manipulation of LMs, by combining other physical fields (e.g., electric, thermal, and acoustic fields) with magnetic fields, is also highlighted. With distinct constitutions and morphological characteristics, magnetically manipulated LM soft robots are categorized into four types: droplet, slurry, particle, and composite. Their diverse applications span reconfigurable electronics, biomedical engineering, and environmental remediation. Finally, we address current challenges and opportunities in material optimization, precise manipulation, and future applications. This overview summarizes the current landscape of magnetically manipulated LM soft robots and offers guidance for their prospective development in medical, electronic, and industrial domains.
PREPARATION OF MAGNETICALLY RESPONSIVE LMs
LMs responsive to external magnetic fields can be categorized into two distinct groups based on the origin of their magnetic properties. The intrinsic materials exploit Lorentz forces on mobile electrons under external magnetic fields, enabling magnetic manipulation without compositional modification. Composite MLMs, by contrast, incorporate magnetic particles such as Fe, Ni, and Fe3O4[41-43]. In this case, extrinsic magnetic responsiveness arises from direct coupling between embedded magnetic particles and external magnetic fields. Owing to the strong magnetic responsiveness and superior design versatility, particle-integrated MLMs have attracted increasing attention and currently represent the primary focus of research in this field[41-43].
In this section, preparation of MLMs is categorized into two methods: mechanical and chemical methods. A third category encompasses other approaches, including those used for the integration of MLMs with other materials and for patterning of LMs.
Mechanical method
The mechanical method for preparing MLMs involves dispersing magnetic particles such as Fe, Fe3O4, and neodymium-iron-boron (NdFeB) into LM through mechanical processes such as stirring[61], grinding[46], rolling[62], and sonication[63]. This method is characterized by its simplicity, low cost, scalability, and the absence of complex chemical reactions or precursors. A key feature of the mechanical method is the continuous disruption of the naturally formed oxide layer on the LM surface[52,64-67]. Upon rupture, fresh LM is exposed and rapidly re-oxidized, forming new oxide layers with adhesive properties[64]. These newly formed oxides adhere to and coat magnetic particles during the mixing process, facilitating their incorporation into the liquid matrix. This method is versatile, allowing for the integration of various particles ranging from micro- to nanoscale into different LMs, such as Ga and EGaIn.
For example, researchers incorporated NdFeB microparticles into EGaIn through mechanical stirring and confirmed the physical mixing without alloying via X-ray analysis[61]. Similarly, a sticky Ni-LM ink for paper electronics was fabricated by directly mixing Ni micropowders with EGaIn and highlighted the adhesion enhancement effect of the oxide film wrapped Ni powders [Figure 2A][52]. In addition to stirring, the strong shear forces from grinding can decrease the size of particles and promote the contact between the LMs and particles[46,68,69]. Our group has reported the grounding of Ni particles together with EGaIn in a mortar, and the EGaIn-Ni composite containing up to 80 wt% nickel can be prepared [Figure 2B][46]. As a powerful supplementary method, sonication ensures homodisperse distribution of magnetic particles [Figure 2C][63], enables the efficient production of MLM nano/microparticles from bulk MLMs[70], and facilitates composite formation[71]. Besides embedding magnetic particles into the LMs, the particles can also be arranged on the surface of LMs[62,72,73]. For example, when rolling the Galinstan droplet on Fe particles, the particles can be attached to the viscous oxidized surface of Galinstan, forming the MLM marbles[62]. In addition, NaOH-treated Galinstan droplets could form spherical magnetic LM marbles upon rolling in a uniform mixture of microscale ferronickel and polyethylene particles [Figure 2D][73].
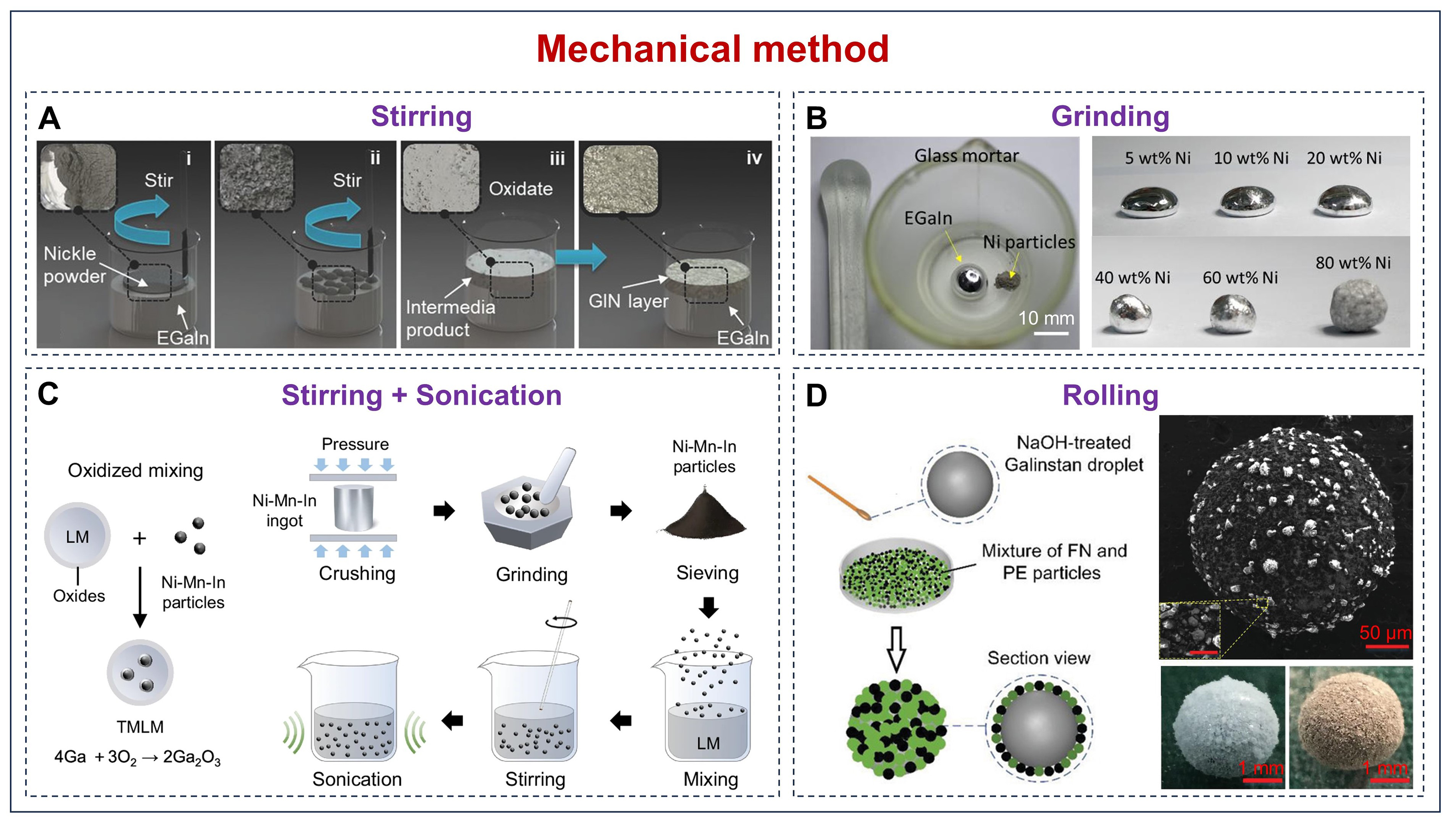
Figure 2. Mechanical methods for preparation of MLMs. (A) Stirring process for EGaIn and Ni powder[52]. Reprinted with permission. Copyright 2018, John Wiley and Sons; (B) Grinding-prepared MLMs with different Ni contents[46]. Reprinted with permission. Copyright 2019, John Wiley and Sons; (C) Stirring and sonication process for Ni-Mn-In particles and Galinstan[63]. Reprinted with permission. Copyright 2025, Springer Nature; (D) Coating of ferronickel and polyethylene particles onto Galinstan through rolling[73]. Reprinted with permission. Copyright 2019, John Wiley and Sons. MLMs: Magnetic liquid metals; FN: ferronickel; PE: polyethylene.
In short, the mechanical method offers a chemical-free and scalable strategy to fabricate MLMs by leveraging the dynamic oxide chemistry and interfacial mechanics of LMs. However, it is noteworthy that the mechanical preparation process can induce oxidation of LMs, significantly degrading their key properties such as fluidity and thermal/electrical conductivity[61,74].
Chemical method
Compared to mechanical methods, chemical methods for preparing MLMs offer distinct advantages in precision, tunability, and stability. For example, acid/base treatments can effectively remove surface oxides for the combination of magnetic particles without hindering the fluidity of LM[51].
When Galinstan was treated with the HCl solution to remove the oxide skin, Fe powders were automatically coated on the LM droplet without mechanical intervention [Figure 3A][51]. Similarly, it is also observed that when Fe particles were mixed with EGaIn and flux HCl solution at room temperature, they were rapidly absorbed and suspended within the LM bulk within seconds of contact[77]. This can be attributed to the HCl flux removing the less-conductive oxide layer and enhancing the polarizability of the Fe particles, thereby promoting wetting through stronger liquid-solid van der Waals interactions compared to liquid-liquid attraction[77]. In addition, the base solution, such as NaOH, can also remove the oxide skin to facilitate the integration of the LM and magnetic particles[60].
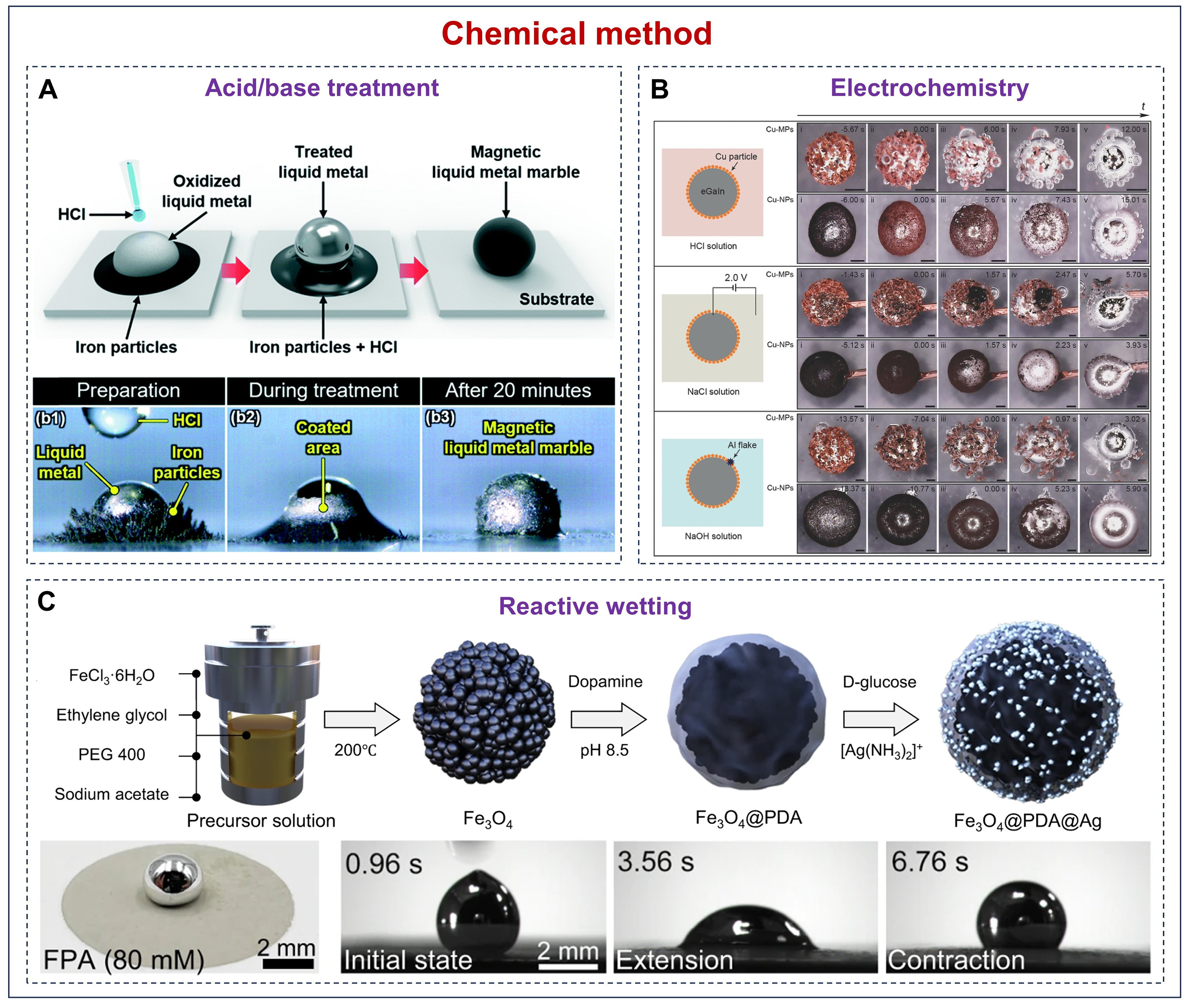
Figure 3. Chemical methods for MLM preparation. (A) Spontaneous incorporation of Fe particles into an EGaIn droplet in HCl solution[51]. Reprinted with permission. Copyright 2019, Royal Society of Chemistry; (B) Phagocytosis phenomenon of the EGaIn in different solutions[75]. Reprinted with permission. Copyright 2017, John Wiley and Sons; (C) Reactive wetting-based MLM preparation[54]. Reprinted with permission. Copyright 2023, Springer Nature. MLMs: Magnetic liquid metals; FPA: Fe3O4@PDA@Ag; PEG: polyethylene glycol.
Moreover, Tang et al. found the phagocytosis phenomenon of EGaIn in aqueous solutions covering a full pH range [Figure 3B][75]. In the acidic (HCl) solution, spontaneous phagocytosis occurs as the acid dissolves both the oxide layers on the EGaIn and copper particles, enabling direct intermetallic wetting. In a neutral (NaCl) solution, phagocytosis requires electrical polarization (≥ 2 V), where cathodic reduction removes oxides and activates reactive wetting. In the alkaline (NaOH) solution, a sacrificial metal of aluminum is needed to generate a localized electrochemical potential, dissolving only the amphoteric oxides while leaving the copper oxides intact until reduction occurs. Each method achieves particle internalization but differs in oxide-removal mechanisms, timescales (fastest with polarization), and byproducts.
Reactive wetting involves chemically driven interfacial interactions that enhance spreading and adhesion by forming new compounds at the contact interface. Ga-based LMs readily undergo reactive wetting with metals such as Cu and Ag by forming intermetallic compounds such as CuGa2 and AgxIny at the interface[54,78]. Coating magnetic particles with appropriate metals to form transition layers facilitates their easy integration and stabilization in LMs. For instance, the NdFeB microparticles were coated with an Ag shell (NdFeB@Ag) and were directly mixed with LM in HCl solution by stirring[76], or the Fe3O4 nanoparticles were coated with an Ag shell to prepare the MLM [Figure 3C][54].
In addition, the magnetic agents can also be electroplated onto the surface of LM droplets[72]. Specifically, two parallel NdFeB magnets positioned outside the electroplating bath generated a constant magnetic field during the process. A cobalt foil served as the anode, while the LM droplet, connected to the cathode via a stainless-steel needle, was supported on a fluorocarbon-coated polydimethylsiloxane (PDMS) pillar. Electroplating was conducted under a fixed current density for a set duration, producing a magnetic CoNiMnP coating on the droplet surface.
In summary, chemical methods for preparing MLMs involve diverse mechanisms, showing a high degree of diversity and flexibility. The fabricated MLMs typically exhibit better stability than those produced by mechanical methods. Nevertheless, in comparison with mechanically based fabrication techniques, chemical routes typically involve more intricate procedures and setups, potentially limiting their feasibility for low-cost and large-scale manufacturing.
Other methods
MLMs can be further functionally enhanced through integration with other soft materials, such as paper and silicone elastomers, by coating, mixing, or packaging methods. For instance, the NdFeB@EGaIn slurry was coated on paper as a flexible circuit or magnet utilizing the oxidation-enhanced adhesion [Figure 4A][61]. In addition, the NdFeB@InSnBi slurry can be mixed with elastomer precursors to create reprogrammable MLM microparticles embedded in silicone [Figure 4B][79]. Moreover, the NdFeB@Ga composite was packaged into 3D printed PDMS shells as magnetic soft robots with reprogrammable magnetization and stiffness[80].
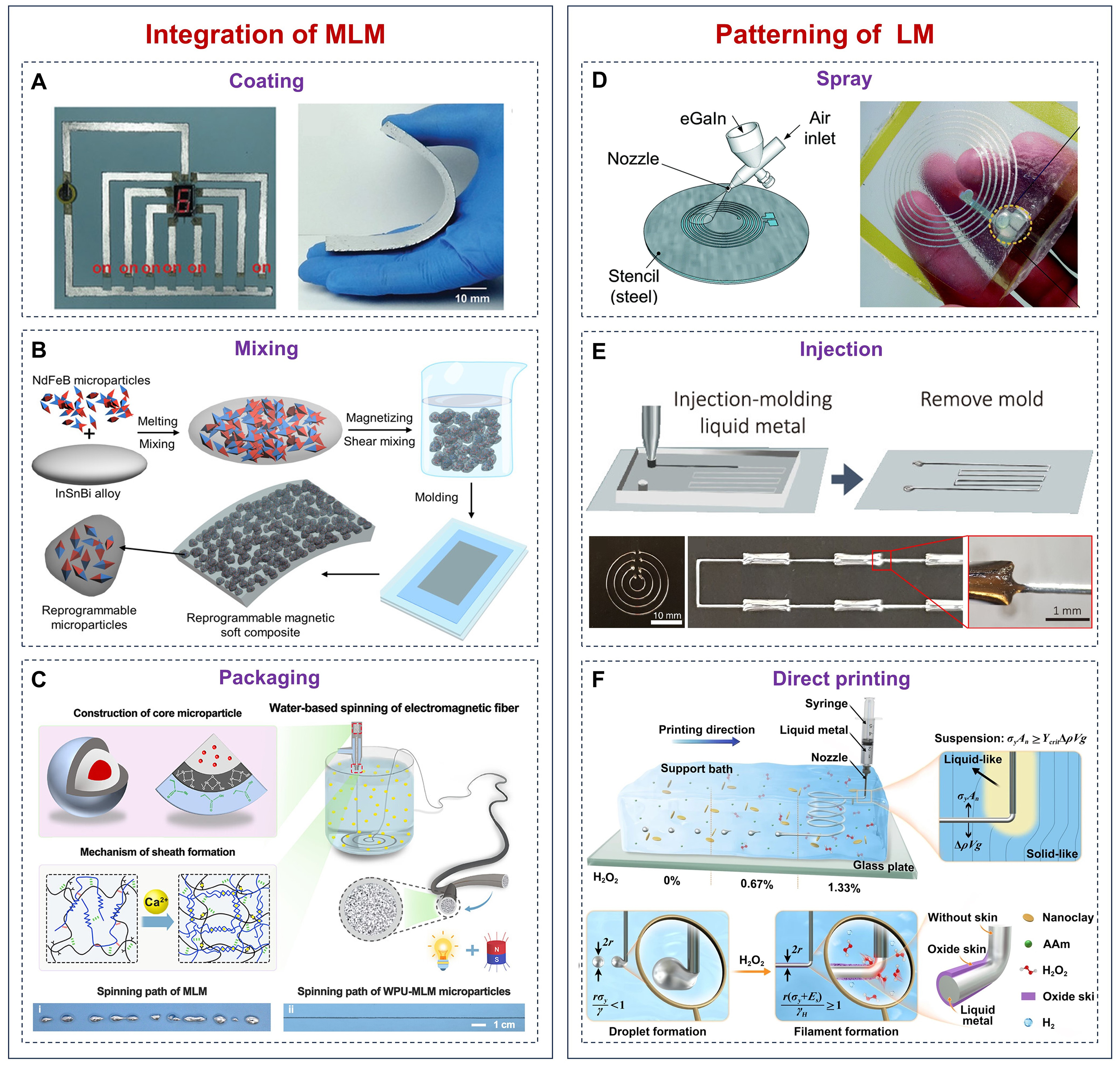
Figure 4. Other methods for MLM preparation. (A) Papers coated with MLM as a flexible circuit and magnet[61]. Reprinted with permission. Copyright 2020, John Wiley and Sons; (B) Preparation of the reprogrammable MLM microparticles in elastomer substrates by mixing[79]. Reprinted with permission. Copyright 2023, John Wiley and Sons; (C) Continuous fabrication of electromagnetic fibers with an MLM as the core and elastic polyurethane as the sheath[81]. Reprinted with permission. Copyright 2024, American Chemical Society; (D) Spray deposition of LM[53]. Reprinted with permission. Copyright 2017, Royal Society of Chemistry; (E) Injection molding of liquid metal[83]. Reprinted with permission. Copyright 2024, American Chemical Society; (F) Suspension printing of LM[86]. Reprinted with permission. Copyright 2022, Springer Nature. MLMs: Magnetic liquid metals; LM: liquid metal.
As mentioned above, pure LMs without embedded magnetic particles can also demonstrate magnetic responsiveness. When current is passed through the LMs, they experience Lorentz forces in the presence of the magnetic field. In addition to bulk and linear configurations, LMs are typically shaped into coils as a flexible electromagnet. The fabrication of LM coils primarily relies on advanced patterning methods for LMs. The 2D LM coils can be fabricated by selective wetting and stencil printing. Taking stencil printing as an example, Varga et al. employed spray deposition to pattern an EGaIn coil on a silicone substrate using a steel stencil [Figure 4D][53]. Injection is another effective method for shaping LMs by injecting them into a designed container or mold[82,83]. Lin et al. employed vacuum-driven pressure differentials to infuse EGaIn into sealed PDMS microchannels to create a 2D coil[84]. Ma et al. employed a removable, nonstick mold to pattern LM by injection, combining the process simplicity of molding with the key advantage of a mold-free final device [Figure 4E][83]. Additionally, LMs can also be injected into tubular molds and directly shaped into 2D or 3D coil structures[85]. Moreover, the 3D LM coil can be fabricated by suspension printing [Figure 4F][86] or direct shaping of LMs at a solid state[19]. A wide array of patterning techniques is available[24]. However, since these contents fall outside the main scope of our review, we will not elaborate on them here.
In summary, the fabrication of MLMs involves distinct strategies with inherent trade-offs. While mechanical methods offer simplicity and scalability, they often compromise the fluidic and conductive properties of the LM due to oxidation. Conversely, chemical methods provide superior stability and precision through intricate interfacial engineering but require more complex setups. To provide a clear overview and facilitate understanding of progress in this field, Table 1 presents a detailed comparison of these preparation methods, highlighting their specific techniques, underlying mechanisms, key advantages, and limitations.
Comparison of preparation methods
| Category | Techniques | Mechanisms | Advantages | Disadvantages |
| Mechanical methods | Stirring | Physical dispersion | Simple | Performance degradation |
| Grinding | Low-cost | |||
| Rolling | Adhesive oxide coating | Scalable | Surface oxidation | |
| Sonication | Universal | Low stability | ||
| Chemical methods | Acid/base treatment | Oxide removal | Controllable | Complex procedures |
| Electrochemical treatment | Reactive wetting | Stable & rapid | Limited scalability | |
| Metal coating | Redox reactions | Versatile | Potential byproducts | |
| Other methods | Integration (e.g., coating, mixing, and packaging) | Physical dispersion | Function enhancement | Complex procedures |
| Patterning (e.g., stencil and suspension printing) | Adhesion | Good designability | ||
| Shaping |
MAGNETIC MANIPULATION OF LMs
Based on their underlying mechanisms, magnetic manipulation strategies can be broadly classified into two categories: magnet manipulation and Lorentz-force manipulation. The former is suited for MLMs containing embedded magnetic particles, which can directly respond to external magnetic fields. The latter applies to current-carrying LMs, in which the magnetic response arises from the Lorentz force acting on the moving electrons within the LMs (i.e., electromagnetic induction). In addition to magnetic fields, LMs can be manipulated through various other fields, including thermal, optical, and electric. The integration of these multi-physical fields may greatly enrich the functionality of LM soft robots and substantially broaden their scope of potential applications, which is discussed in the following section on multi-field manipulation.
Magnet manipulation
The magnetic particles embedded within LM can be broadly categorized into two types: soft magnets and hard (permanent) magnets[1]. Soft magnets, such as Fe or Ni, exhibit high magnetic permeability and low coercivity. They can be easily magnetized and demagnetized by an external field. In contrast, hard magnets, including NdFeB or strontium ferrite microparticles, possess high remanence and coercivity. Once magnetized, they retain a strong permanent magnetic moment. When a magnetic field is applied to the MLM entity, the field acts directly on the magnetic particles rather than the LM. However, the coupling between particles and the surrounding LM mediates the transfer of magnetic forces to the entire MLM. This coupling arises from viscous drag, particle aggregation, and surface tension modulation at the LM interface[42,46]. As a result, localized particle responses to the magnetic field are transduced into motion or morphological changes of the whole MLM entity[50]. Moreover, magnetic fields commonly employed to manipulate MLMs are typically generated by permanent magnets and electromagnets.
Permanent magnet manipulation
Permanent magnets composed of hard magnetic materials can provide a simple, compact, and energy-free source of static magnetic fields, making them suitable for portable or long-term operations where stability and low power consumption are critical. A single permanent magnet is typically utilized to actuate the movement of a single MLM droplet [Figure 5A][87]. By dynamically adjusting the orientation and position of the magnetic field in three dimensions, MLM droplets can be controllably propelled through three-dimensional motion, including inclined climbs[87], spiral paths[46], and upward propulsion [Figure 5B][88]. It should be noted that a metal-phobic substrate is imperative to prevent residue deposition during motion. In addition, by employing single permanent magnets with distinct shapes such as rectangular, annular, and triangular to tailor the magnetic field spatially. The resulting magnetic force directs embedded magnetic agents toward regions of maximum flux density, thereby transforming the MLM into corresponding geometries [Figure 5C][54].
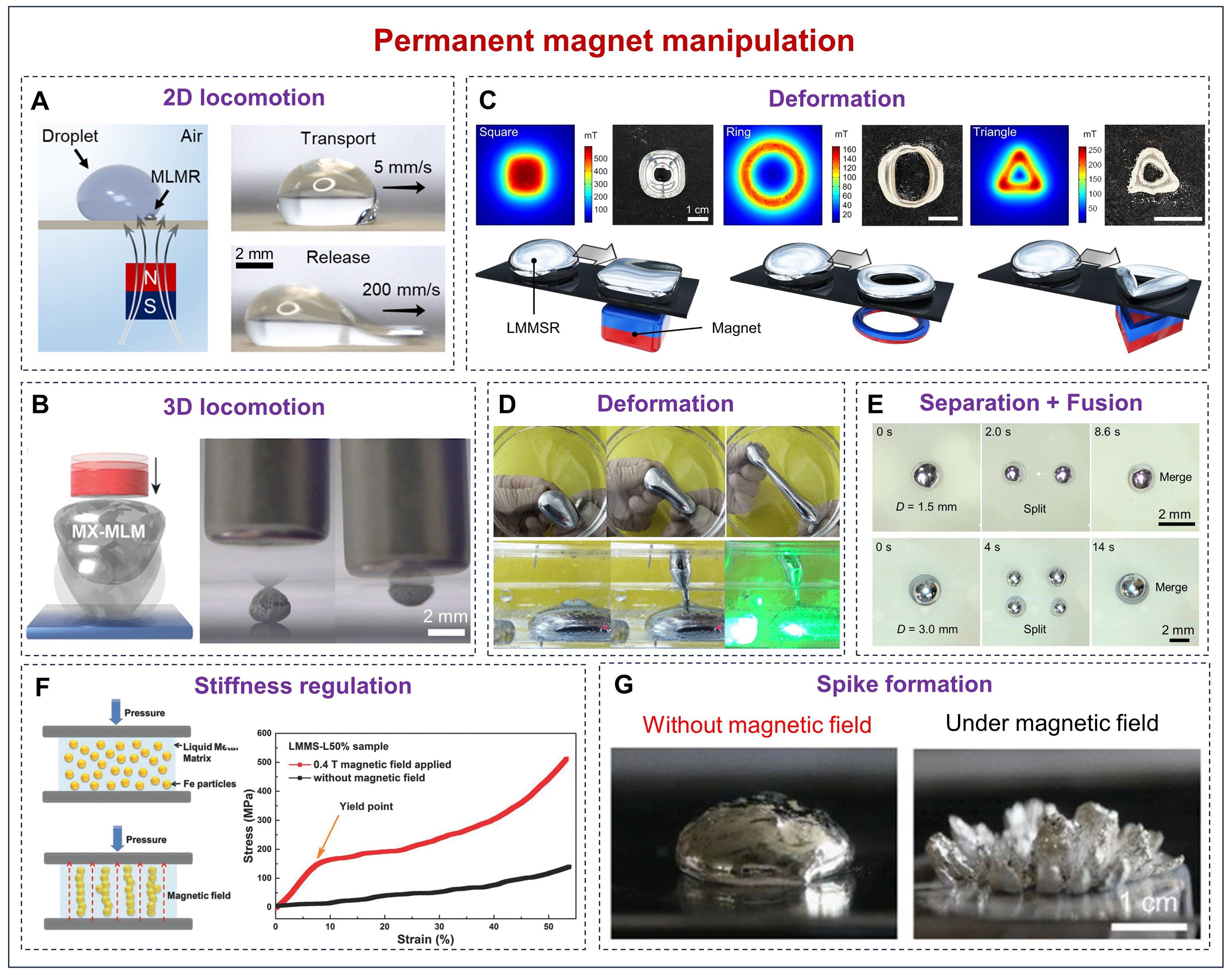
Figure 5. Permanent magnet manipulation. (A) 2D[87] and (B) 3D locomotion[88] and (C) deformation[54] of the MLM droplet manipulated by a single permanent magnet. Reprinted with permission[87]. Copyright 2022, American Chemical Society; Reprinted with permission[88]. Copyright 2023, John Wiley and Sons; Reprinted with permission[54]. Copyright 2023, Springer Nature; (D) Deformation[89], (E) separation, and fusion[87] of the MLM droplet manipulated by multiple magnets. Reprinted with permission[89]. Copyright 2019, American Chemical Society; Reprinted with permission[87]. Copyright 2022, American Chemical Society; (F) Particle alignment-induced modulus variation[90]. Reprinted with permission. Copyright 2018, John Wiley and Sons; (G) Rosensweig instability-induced spike formation[93]. Reprinted with permission. Copyright 2019, John Wiley and Sons. MLM: Magnetic liquid metal; LMMS: liquid-metal-based magnetoactive slurry; MLMR: magnetic liquid metal robot; MLMR: magnetically actuated liquid metal robot; LMMSR: liquid metal magnetic soft robot.
In addition, multiple permanent magnets can be employed to generate more complex and programmable magnetic field profiles, thereby inducing a richer diversity of deformation modes in the MLMs. For instance, when two separated magnets are placed opposite each other, each attracts a portion of the magnetic particles within the MLM droplet, thereby stretching the MLM droplet [Figure 5D][89]. Gradually increasing the distance between two opposing magnets elongates the MLM until it ruptures, splitting it into two smaller droplets. Similarly, when a single MLM droplet is exposed to a critical confining magnetic field generated by two or four cylindrical permanent magnets aligned with identical polarity, it splits into two or four smaller sub-droplets, respectively [Figure 5E][87]. In both cases, the splitting behavior results from a magnetic force that exceeds the surface tension of the MLM.
Under a static external magnetic field, prominent particle alignment-induced significant modulus variation [Figure 5F][90], and Rosensweig instability-induced spike formation can also be observed in the MLMs [Figure 5G][91]. The magnetically controlled modulus variation occurs due to the field-induced microstructural reorganization of magnetic particles within the LMs. Upon application of an external magnetic field, the particles become magnetized and experience strong dipole-dipole interactions. These attractions cause the particles to rapidly align along the magnetic field lines, forming chain-like structures [Figure 5F][90]. These structures create a solid-like network throughout the fluid volume, dramatically increasing its resistance to deformation. Consequently, the macroscopic modulus, such as the shear modulus, experiences a significant orders-of-magnitude increase, as the MLM transitions from a viscous liquid to a viscoelastic solid. This effect can be enhanced by increasing the applied magnetic field.
Rosensweig instability-induced spike formation arises from a competition between magnetic and surface energies[91,92]. When a vertical magnetic field is applied, the MLMs become magnetized and drive the system toward minimal total energy. Surface tension and gravity promote a flat interface to minimize surface area and potential energy. In contrast, the magnetic field encourages morphological deformation that lowers magnetic reluctance. Above a critical field strength, the energy benefit from expelling magnetic flux exceeds the energy cost of increased surface area and higher gravitational potential. This flux expulsion occurs through the growth of peaks that extend into the air, which has higher magnetic permeability. The resulting energy imbalance causes spontaneous symmetry breaking of the flat interface. This leads to the formation of a regular array of sharp and stationary spikes [Figure 5G][93].
Electromagnet manipulation
The electromagnet is a magnet in which the magnetic field is both generated and controlled by an electric current flowing through a coiled wire, in accordance with Ampere’s circuital law. When an electric current passes through a solenoid wound around a ferromagnetic core (e.g., Fe), it induces a magnetic field proportional to the current. Different from the permanent magnets, electromagnets offer dynamic tunability, allowing both field strength and polarity to be controlled via input current. This capability enables programmable actuation and rapid switching, although it usually comes at the cost of increased energy consumption and bulkier hardware.
A single electromagnet can offer little functional advantage over a permanent magnet for manipulating MLMs. Consequently, arrays consisting of multiple independently addressable electromagnets are more commonly employed, as they enable the generation of highly controllable, dynamic, and spatially complex magnetic fields through precise modulation of the input currents. Similar to the manipulation using multiple permanent magnets, the electromagnetic array can also manipulate the MLMs to execute diverse behaviors such as 2D/3D locomotion, deformation, and separation [Figure 6A and B][50,51]. Notably, the most fundamental distinction between them is the dynamic reconfigurability of the magnetic field. An electromagnetic array generates a digitally programmable field through software-controlled electrical currents without any moving parts, making it easy to achieve automation and closed-loop control. In contrast, multiple permanent magnets produce a static field geometry fixed by their physical arrangement, requiring mechanical movement to alter the magnetic forces, which is typically slow, cumbersome, and difficult to control precisely.
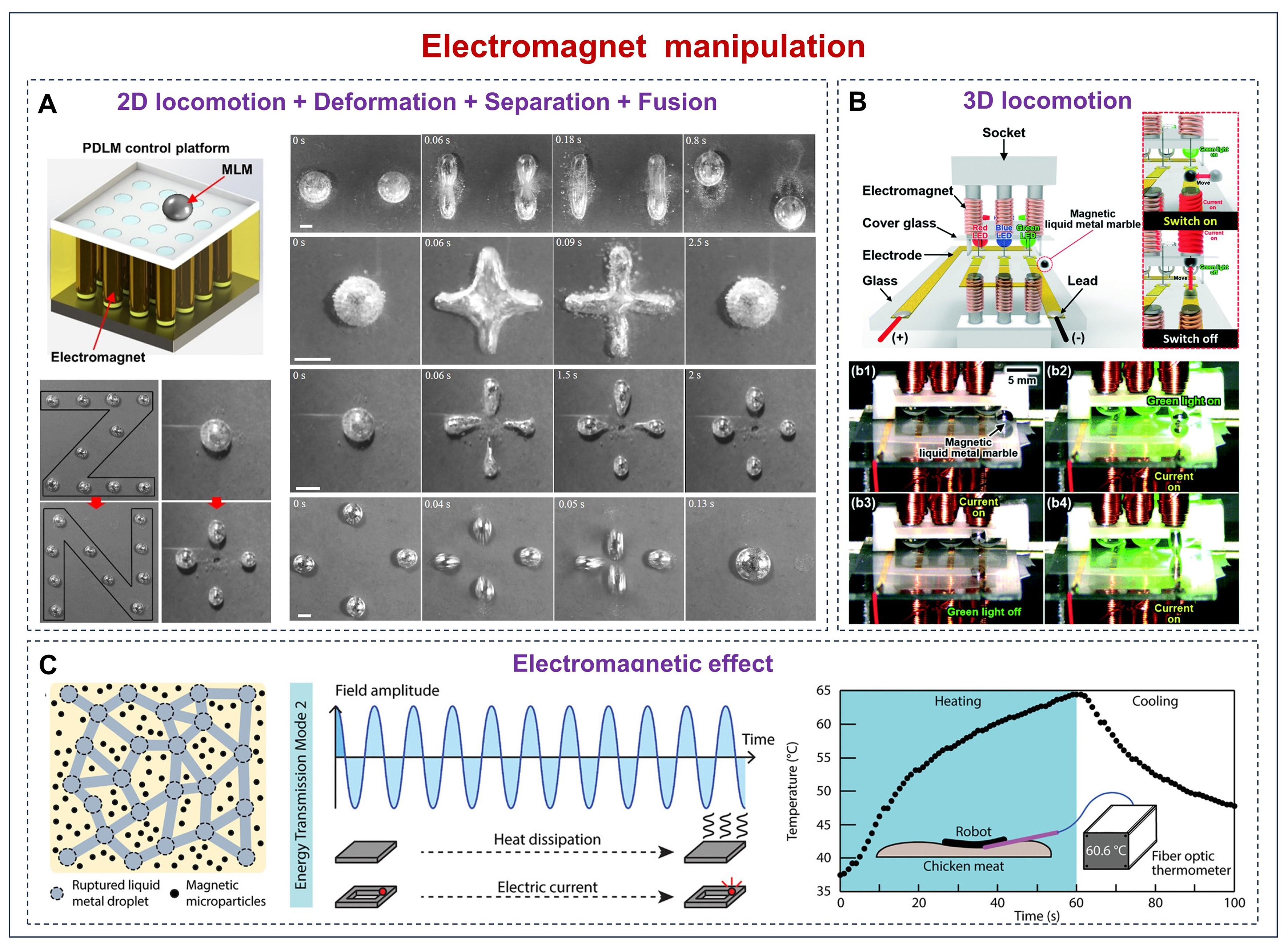
Figure 6. Electromagnet manipulation. (A) 2D locomotion, deformation, separation, fusion[50] and (B) 3D locomotion[51] of the MLM droplet manipulated by electromagnetic array. Reprinted with permission[50]. Copyright 2020, American Chemical Society; Reprinted with permission[51]. Copyright 2019, Royal Society of Chemistry; (C) Electromagnetic effect of the LMs under an AMF[94]. Reprinted with permission. Copyright 2022, John Wiley and Sons. MLM: Magnetically actuated liquid metal; LMs: liquid metals; AMF: alternating magnetic field; PDLM: programmable digital liquid metal.
Moreover, electromagnets also offer a fundamental advantage in generating alternating magnetic fields (AMFs). By simply modulating the direction and magnitude of the input current, the magnetic field can be rapidly switched, oscillated, or sinusoidally varied without any mechanical movement. This direct control over the excitation source enables precise frequency and waveform tuning, making electromagnets essential for applications requiring dynamic field control. Under an AMFs, MLMs exhibit a rich spectrum of electromagnetic phenomena [Figure 6C][94]. The time-varying magnetic field induces closed-loop eddy currents within the electrically conductive MLMs according to Faraday’s law of induction[95]. The electrical resistance of the material causes these currents to dissipate energy as Joule heating, also referred to as eddy current heating or inductive heating, leading to a rapid temperature rise. Simultaneously, these eddy currents interact with the applied magnetic field, generating Lorentz forces that can cause deformation, rotation, or propulsion, which will be discussed later. In addition, magnetic particles within MLMs undergo high-frequency remagnetization, contributing to further hysteretic heating[96].
Lorentz-force manipulation
The pure LMs without magnetic agents can also be magnetically manipulated via the Lorentz force, which is generated by the interaction between an external magnetic field and the moving electrons within the conductive LM. The Lorentz force describes the total force F exerted on a point charge moving with velocity v in a magnetic field B[97]. It is given by:
F = Q · v × B
where F is the force vector, Q is the electric charge, v is the velocity vector, B is the magnetic field vector, and v × B denotes the cross product of the velocity and magnetic field vectors.
Moreover, the force acting on each moving charge can be extended to describe the macroscopic force exerted on a current-carrying conductor[98]. For a wire segment with current I, length vector L, and uniform magnetic field B, the force becomes:
FL = I (L × B)
This expression follows from aggregating the Lorentz force over all moving charges within the conductor, where the drift velocity of charges and the linear charge density are incorporated into the definition of the electric current I:
I = nqAvd
where n is the charge carrier density, q is the charge per charge carrier, A is the cross-sectional area, and vd is the drift velocity.
Electrical currents are primarily categorized by their origin into applied and induced currents. Applied current, also known as conduction current, is generated by an external power source such as a battery or generator, which establishes an electric field to drive charge carriers through a conductive path. In contrast, an induced current is created through electromagnetic induction. A changing magnetic field generates a circulating electric field, which in turn causes electrons to flow within a conductor.
Applied current
For optimal current distribution and magnetic manipulation, applied currents are typically introduced to the LM wires, which can be fabricated by injecting LM into the flexible microfluidic channels[98]. The relationship between voltage, current, and resistance in the LM wire is described by Ohm’s law. For a homogeneous conductor at constant temperature, the current density J can be related to the electric field E through the microscopic form of Ohm’s law:
J = σE
where σ is the electrical conductivity of the material. This microscopic formulation can be integrated to yield the macroscopic form:
V = IR
where V is the voltage across the conductor, I is the current flowing through it, and R is its electrical resistance. The resistance R is related to the material’s conductivity σ and the conductor’s geometry through:
R = L/(σA)
where L is the length of the conductor and A is its cross-sectional area.
The magnetic response of each encapsulated LM wire to a common magnetic field can be precisely and independently controlled by adjusting the magnitude and polarity of the applied voltage, enabling accurate regulation of the resulting current and corresponding Lorentz forces [Figure 7A][98].
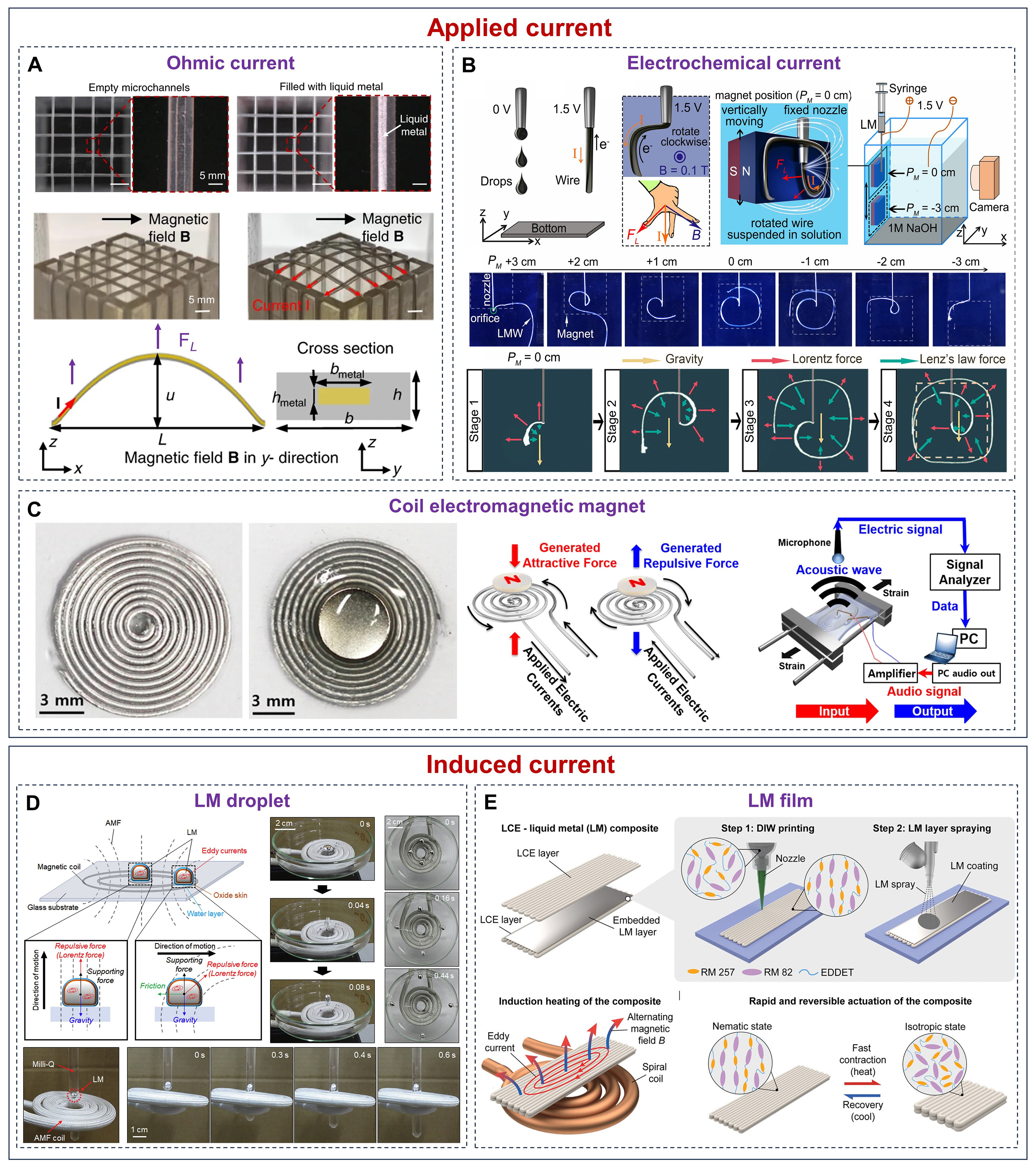
Figure 7. Lorentz-force manipulation. Lorentz-force manipulation of the LM wires carrying (A) Ohmic current[98] and (B) electromechanical current[55]. Reprinted with permission[98]. Copyright 2022, Springer Nature; Reproduced with permission[55]. Copyright 2022, National Academy of Sciences; (C) Working mechanism of the LM coil electromagnetic magnet[99]. Reprinted with permission. Copyright 2015, Springer Nature; Lorentz-force manipulation of (D) the LM droplet[95] and (E) film[57] carrying induced current. Reprinted with permission[95]. Copyright 2018, Elsevier. Reprinted with permission[57]. Copyright 2024, John Wiley and Sons. LM: Liquid metal; PC: personal computer; DIW: direct ink writing.
The stabilization of LM wires can also be enabled by electrochemically mediated interfacial tension reduction [Figure 7B][55]. When a voltage of 1.5 V is applied to Galinstan in a 1M NaOH solution, surface oxidation drastically lowers interfacial tension. This allows the LM to exit the nozzle as continuous, cylindrical streams rather than droplets. In contrast to conventional Ohmic current, the electrical current observed in this system originates from electrochemically mediated redox reactions at the LM wire interface. It exhibits a linear dependence on the wire length, as the expanding surface area provides additional active sites for interfacial electron transfer. Under the combined influence of three primary forces of gravity, the Lorentz force, and the force arising from Lenz’s law, the manipulated streams levitate and form a distinctive spiral shape.
In addition to the wire, the LM coil is another effective structure for Lorentz-force manipulation. By applying a current through the LM coil, it functions as an electromagnet with adjustable magnetic pole orientation and field strength [Figure 7C][99]. Under an external magnetic field, the soft robots integrated with multiple LM coils can perform complex motions, such as running, jumping, and swimming, by independently controlling the current applied to each coil, as discussed later.
Induced current
The induced current generated within the LM under an AMF enables truly untethered magnetic manipulation, thereby eliminating the need for any physical wiring. This induced current arises from Faraday’s law of electromagnetic induction, which states that a changing magnetic flux, conceptually understood as the total number of magnetic field lines passing through a loop, induces an electromotive force (EMF) in a closed circuit. When the circuit is closed, this EMF drives an induced current. The phenomenon is expressed as:
ε = -dΦ/dt
where ε is the EMF, dΦ/dt denotes the rate of change of magnetic flux Φ with respect to time t. The negative sign (-) indicates that the direction of the induced current always opposes the change in magnetic flux that produces it.
According to Lenz’s law, these currents generate a secondary magnetic field opposing the external AMF, thereby producing a repulsive Lorentz force on the conductor[100]. The force magnitude is proportional to the strength of the AMFs. As the field is strongest at the coil center, eddy currents induced in the LM droplet create sufficient repulsion to overcome gravity and cause levitation [Figure 7D][95]. However, the strength of the magnetic field diminishes and its orientation becomes inclined away from the coil’s center. In this region, the vertical component of the repulsive force is insufficient to levitate the LM, whereas the horizontal component induces lateral motion. Moreover, the LM can be continuously manipulated by changing the position of the AMFs[101]. While formation of eddy currents is not limited to specific geometries and can occur in LMs of various forms, including droplets [Figure 7D][95] and films [Figure 7E][57], their magnitude, spatial distribution, and practical applicability are strongly influenced by shape. The geometry determines the paths of current flow, thereby affecting the resulting electromagnetic forces. Additionally, the Joule heating effect generated by eddy currents can be employed to actuate LM systems that incorporate thermal-responsive components [Figure 7E][57].
Multi-field manipulation
Beyond magnetic fields, a variety of other physical fields can be utilized for non-contact manipulation of LM droplets, such as electric, thermal, and acoustic. In addition, these fields are capable of operating independently with minimal interference, allowing for the possibility of multi-physical field coordination to realize complex and programmable LM behaviors. In this section, we describe the mechanisms for the manipulation of LMs via different physical fields and discuss the possibility of multi-field manipulation.
Electric actuation of Galinstan droplets is achievable in electrolytes through high surface charge density formation in the electric double layer (EDL)[39]. The electric field induces asymmetric charge redistribution in the EDL, creating an interfacial tension gradient (Δγ) between the droplet’s hemispheres that drives propulsion via the Lippmann equation:
where γϕ is potential-dependent interfacial tension at applied electrode potential ϕ, γ0 is the maximum tension at the point of zero charge (ϕ0), where net surface charge density is null, and c is the differential capacitance of the EDL per unit area, representing charge storage capacity at the interface. The Δγ generates a Laplace pressure difference to overcome viscous drag, with directionality determined by the dominant charge carriers.
In alkaline NaOH solution, the Galinstan surface reacts with OH- to form soluble [Ga(OH)4]- ions (Figure 8A, left), which act as charge carriers in the EDL[39]. When an electric field is applied, these anions migrate toward the anode while Na+ cations accumulate near the cathode, generating an interfacial tension difference (Δγ). This difference produces a Laplace pressure gradient (ΔP = 2Δγ/R), where ΔP is the Laplace pressure difference across the droplet interface and R is the droplet radius, propelling the droplet toward the anode. Similarly, in acidic KI-HCl solution (Figure 8A, right), Ga3+ formation at the interface allows I- anions to dominate EDL behavior. Under an electric field, I- preferentially adsorbs on the cathode side, generating an opposite interfacial tension gradient that drives the droplet toward the cathode. Electric field-driven LM droplets typically move linearly along the shortest interelectrode path due to unidirectional interfacial tension gradients. By contrast, magnetic field actuation enables contactless navigation through Lorentz force dynamics or magnetic agents. By combining electric and magnetic field actuation, it becomes possible to realize the combination of both purposeful movement and active trajectory control.
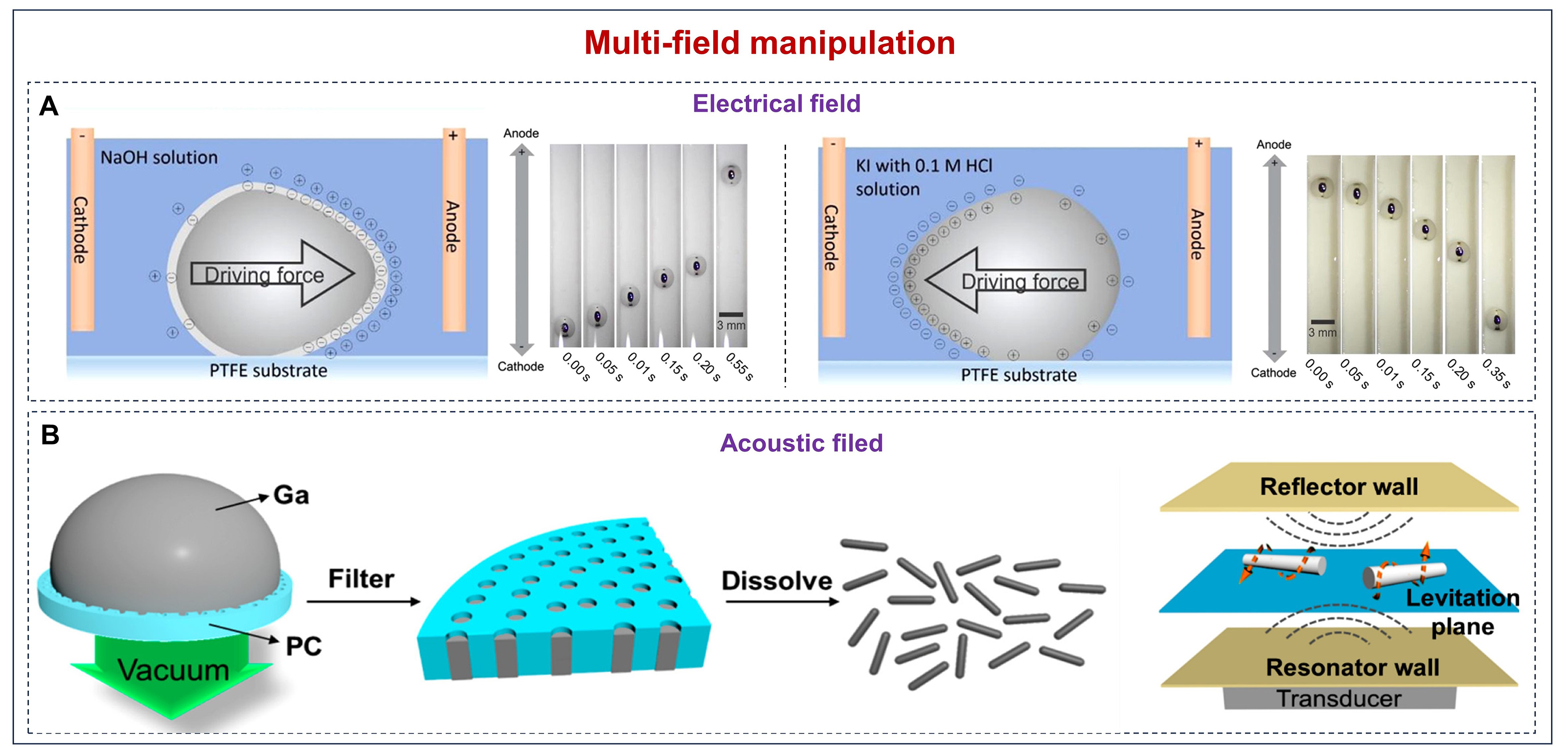
Figure 8. Multi-field manipulation. (A) EDL-based electric actuation of Galinstan droplets in alkaline (left) and acid solution (right)[39]. Reprinted with permission. Copyright 2019, American Chemical Society; (B) LM nano-swimmers propulsion via acoustic field[56]. Reprinted with permission. Copyright 2018, American Chemical Society. EDL: Electric double layer; LM: liquid metal; PC: personal computer; PTFE: polytetrafluoroethylene.
The acoustic propulsion mechanism of LM nanoswimmers is driven by asymmetric acoustic radiation forces generated under ultrasound field excitation [Figure 8B][56]. When exposed to continuous ultrasonic waves, the rodlike LMs with geometrically asymmetric ends experience differential acoustic pressure distributions along their longitudinal axis. This pressure gradient creates a net acoustic radiation force in the levitation plane that propels the nanomachines forward, with the narrower tip serving as the leading edge due to its lower hydrodynamic resistance. Simultaneously, secondary acoustic streaming flows develop near the substrate surface, generating viscous drag that partially counteracts the primary propulsion force. The dominance of acoustic radiation forces enables directional motion with velocities up to 23 μm·s-1 at an optimal frequency of 420 kHz and voltage of 10 V[56]. The propulsion efficiency is further tunable through ultrasound parameters, where higher voltages amplify the pressure gradient while maintaining the characteristic rotational swimming trajectory.
Photothermal actuation of LM nano-swimmers is achievable through localized temperature gradients generated by laser irradiation[102]. Continuous near-infrared irradiation generates an axial thermal gradient since the nano-swimmers exhibited asymmetric geometries of a broad tail and a sharp tip. The tail region, containing more metallic volume, absorbs more heat and reaches a higher temperature than the tip. This anisotropic heating drives self-thermophoresis, where the induced thermophoretic force pushes the nano-swimmer tip-forward along its longitudinal axis. At the same time, the temperature gradient also induces thermoosmotic flow within the electrical double layer adjacent to the substrate, creating a hydrodynamic resistance that opposes motion. Thermophoretic force dominates, enabling controlled nano-swimmer propulsion with velocities up to 31.22 μm·s-1 under 5 W·cm-2 irradiation[102]. The propulsion speed is further modulated by substrate surface potential, since higher potentials enhance thermoosmotic resistance, slowing the swimmer.
Photothermal and acoustic fields can achieve the effective actuation of many LM nano-swimmers. However, the directional control and collective behavior of nano-swimmers are inherently difficult to regulate under a single optical or acoustic field. By incorporating magnetic nanoparticles into their structure, external magnetic fields may be introduced as an additional degree of control, enabling the combination of robust propulsion and precise navigation.
APPLICATIONS OF MLMs FOR SOFT ROBOTS
The practical applications of MLMs for soft robots are systematically mapped onto four categories: droplet, slurry, particle, and composite, based on their composition and morphology. For instance, the morphology of MLMs changes from a droplet to a slurry as the concentration of magnetic particles increases. In addition, dispersed MLM nano- and microparticles generated via ultrasonic treatment exhibit a much higher surface-to-volume ratio than bulk MLMs. Furthermore, integrating MLMs with other soft materials enables composite systems that offer greater design flexibility and functionality for soft robots.
MLM droplet-based soft robots
When the content of embedded magnetic microparticles is low (typically < 10 wt%), the MLMs showed good fluidity. In this condition, a small volume of MLMs naturally exhibits a spherical droplet morphology due to the dominant influence of surface tension over gravitational forces[103]. This behavior can be attributed to the minimization of surface free energy, as determined by the Young-Laplace equation:
ΔP = γ (1/R1 + 1/R2)
where ΔP is the pressure difference across a curved fluid interface, γ is the surface tension, and R1 and R2 are the principal radii of curvature of the interface at a specific point. Thus, high surface tension promotes compact, low-surface-area morphologies. Given the inherently high surface tension of LMs (~500 mN/m), small-volume MLMs tend to maintain a near-spherical droplet, stabilized by the balance between capillary pressure and external forces.
MLM droplet-based soft robots exhibit unique advantages in advanced applications due to their combined fluidic, metallic, and magnetic properties. The simultaneous presence of magnetic responsiveness and fluidity allows precise spatial manipulation under magnetic fields while maintaining shape deformability[87]. Surface tension-dominated behavior at small scales ensures shape recovery after deformation, crucial for adaptive and reconfigurable devices. Moreover, their low toxicity facilitates biomedical applications like targeted drug delivery[54]. Consequently, MLM droplet-based soft robots demonstrate significant potential for applications in fluid manipulation, flexible electronics, and biomedical engineering.
The MLM droplet can achieve high-performance droplet manipulation through its unique active or passive deformability and phase-transition capabilities. The MLM droplet robot can transport droplets across a wide volume range (5-1,100 μL) at speeds up to 180 mm·s-1, adapt to confined spaces via fluidity-based shape modulation, and split or merge on demand for cooperative multi-droplet tasks. Its magnetic-field-induced shape control enables tunable adhesion forces, while temperature-responsive solidification allows stimuli-free droplet pinning [Figure 9A][87]. When integrated into microfluidic architectures, the MLM droplet can function as a magnetically manipulated valve element by passing through and blocking the microchannel, exhibiting 92% flow control efficiency at 1 mL·h-1[104]. In another work, Firouznia et al. introduced a shapeshifting concept for the LM droplet, transforming its explosive electrohydrodynamic instability under a magnetic field into a controlled, cyclic motion [Figure 9B][105]. This approach creates a compact, soft fluidic pump from a single droplet, positioning it as a novel on-board power source for soft robotics and microfluidic devices[105].
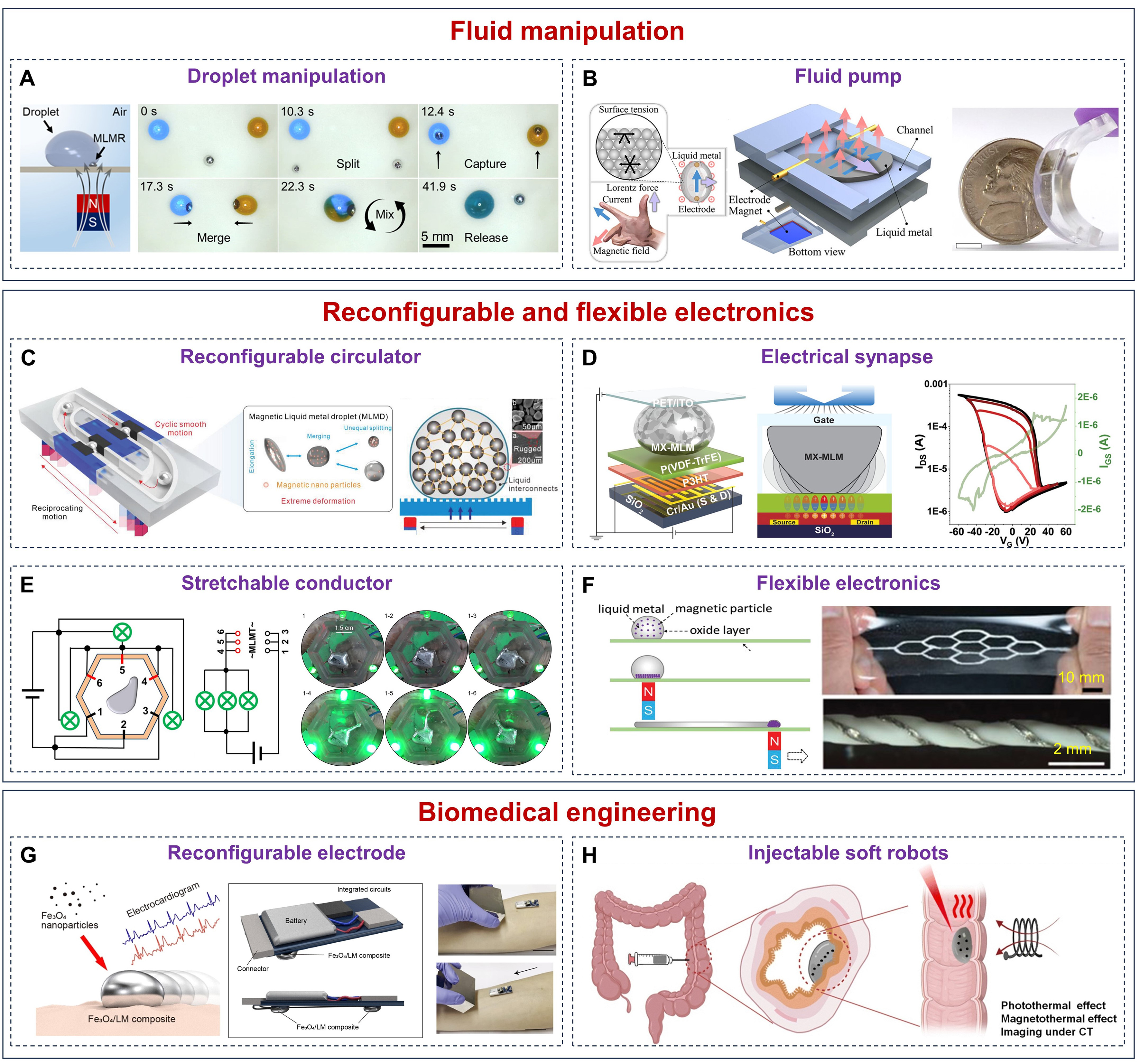
Figure 9. MLM droplet-based soft robots. (A) Droplet manipulation using the MLM droplet[87]. Reprinted with permission. Copyright 2022, American Chemical Society; (B) Electrohydrodynamic instability-based LM pump[105]. Reprinted with permission. Copyright 2025, John Wiley and Sons; Schematic showing the device structure and mechanism of the MLM droplet-based (C) reconfigurable circulator[106] and (D) electric synapse[88]. Reprinted with permission[106]. Copyright 2023, John Wiley and Sons; Reprinted with permission[88]. Copyright 2023, John Wiley and Sons; (E) MLM droplet-based stretchable conductor for a reconfigurable circuit[89]. Reprinted with permission. Copyright 2019, American Chemical Society; (F) MLM droplet-enabled patterning of LM[46]. Reprinted with permission. Copyright 2019, John Wiley and Sons; (G) MLM droplet as a reconfigurable electrode for monitoring of the ECG signal[60]. Reprinted with permission. Copyright 2023, American Chemical Society; (H) Injectable MLM for thermal therapy and imaging[109]. Reprinted with permission. Copyright 2024, Royal Society of Chemistry. MLM: Magnetic liquid metal; LM: liquid metal; ECG: electrocardiogram; MLMR: magnetic liquid metal robot; CT: computed tomography.
Capitalizing on their dual conductive and deformable properties, MLM droplet-based robots demonstrate unique potential for creating reconfigurable and flexible electronics. The MLM droplet can function as a magnetically manipulated conductive switch by dynamically bridging or isolating electrodes as it passes through surface-modified microfluidic channels without residual. Based on this mechanism, a soft reconfigurable circulator was designed for soft robots to perform advanced functions, such as logic computation, reprogrammability, and self-adaptivity [Figure 9C][106]. In addition to mechanical switches, Chen et al. developed the thermomagnetic LM switches by incorporating Ni2Mn1.4In0.6 Heusler alloy particles into Galinstan, achieving fast bidirectional thermal response (1.2 s at 75 °C, reducible to 660 ms) for fire safety applications[63].
Incorporating MLMs into conventional circuits and devices can significantly enhance their functionality. The MLM droplet was encapsulated with highly conductive Ti3C2Tx (MXene) to avoid adhesion and corrosivity during the integration. The MX-MLM (MXene-encapsulated MLM) was utilized as a top gate electrode in a transistor to enable magneto-interactive synaptic functionality for detecting and learning 3D path information [Figure 9D][89]. Similarly, the MLM droplet can also be coated with Cr2Te3 to simultaneously achieve nonwettability and electrical conductivity, enabling its application in high-density magnetic path storage and as a flexible vibrator in wearable sensors for machine learning-enhanced dynamic gesture recognition[107]. In addition, the MLM droplet can perform a larger deformation under a magnetic field, functioning as a stretchable conductor capable of dynamically reconfiguring circuit pathways [Figure 9E][89]. Moreover, under magnetic actuation, the aggregated magnetic microparticles induce MLM droplet deformation into a continuous conductive trace on diverse substrates, enabling patterning of LM for flexible electronics [Figure 9F][46].
Moreover, the application of MLM droplet robots in biomedical engineering is also investigated. For example, Kim et al. employed the MLM droplet on the skin as a reconfigurable epidermal electrode for electrocardiogram (ECG) detection[60]. The MLM droplet electrodes enable multi-site measurements without the need for frequent detachment or replacement. They can be rapidly repositioned along Einthoven’s triangle to record signals from different leads [Figure 9G][60]. The MLM droplet was also expected for in vivo operation, with potential applications in controlled drug release[54], foreign body removal[108], and minimally invasive surgery[109]. For example, utilizing the outstanding deformability, the MLM can be injected into the target tissue, such as the large intestine or abdominal cavity [Figure 9H][109]. The radiopaque MLM droplets enable real-time computed tomography (CT) imaging guidance, allowing precise magnet-driven navigation to target tissues for localized photothermal or magnetothermal ablation therapy.
MLM slurry-based soft robots
As the content of embedded magnetic particles further increased (typically > 10 wt%), the fluidity of the MLM decreased significantly, leading to a more slurry-like consistency. This higher viscosity improved the structural stability of the soft robot under deformation, allowing it to maintain complex shapes without collapsing[61,90]. The transition from a low-viscosity droplet state to a viscoelastic slurry enabled programmable shape-locking behavior, where external magnetic fields or force could induce temporary deformations that were retained upon field removal or force.
MLM slurry-based soft robots bridge the gap between solid and liquid states, combining the structural stability of solids with the dynamic adaptability of fluids. Moreover, the increased magnetic particle concentration also strengthened magneto-mechanical coupling, enhancing the magnetic response performance. With these unique properties, MLM slurry-based soft robots demonstrate remarkable potential for multifunctional applications spanning object manipulation, flexible electronics, and biomedical engineering.
For object manipulation, the MLM slurry composed of Fe particles and Ga was demonstrated as a magnetic robotic gripper [Figure 10A][59]. By coupling the switchable interlocking force during phase transition with magnetic responsiveness, the MLM slurry can achieve strong, reversible, and nondestructive magnetic manipulation of arbitrarily shaped non-magnetic objects. The interlocking force exhibited a difference of five orders of magnitude between the solidified and melted states. In addition, leveraging Rosensweig instability-induced surface spike formation, the MLM slurry robotic pillar achieves magnetically switchable adhesion [Figure 10B][110]. In the absence of a magnetic field, their intrinsic fluidity ensures gentle, conformal contact for damage-free pickup, while magnetic stimulation triggers rapid spike formation and stiffening, enabling reversible adhesion reduction and noncontact ejection. This instability-driven mechanism allows deterministic transfer printing of fragile 2D and 3D objects.
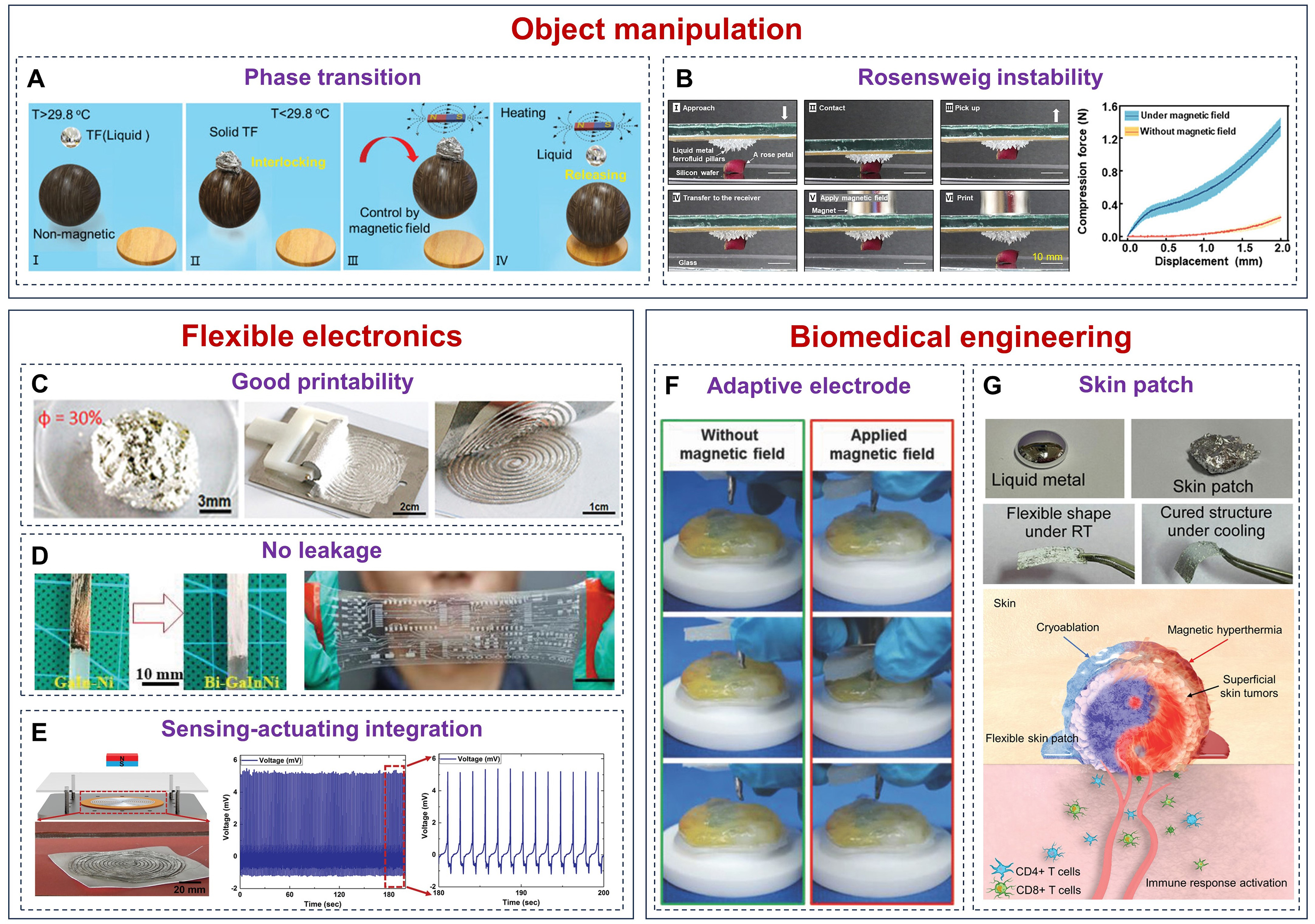
Figure 10. MLM slurry-based soft robots. MLM slurry-based soft gripper utilizing (A) phase transition[59] and (B) Rosensweig instability[110]. Reprinted with permission[59]. Copyright 2021, John Wiley and Sons; Reprinted with permission[110]. Copyright 2024, John Wiley and Sons; Printable MLM slurry with the properties including (C) good printability[111], (D) no leakage[112], and (E) sensing-actuating integration[61]. Reprinted with permission[111]. Copyright 2018, John Wiley and Sons; Reprinted with permission[112]. Copyright 2019, John Wiley and Sons; Reprinted with permission[61]. Copyright 2020, John Wiley and Sons; (F) MLM slurry-based stiffness-tunable bioelectrode[90]. Reprinted with permission. Copyright 2018, John Wiley and Sons; (G) Flexible MLM patch for hybrid thermophysical therapy[114]. Reprinted with permission. Copyright 2023, John Wiley and Sons. MLM: Magnetic liquid metal; TF: transitional ferrofluid; RT: room temperature.
Benefiting from the low fluidity and surface tension, the MLM slurry shows better printability than the pure LM, promising for the fabrication of flexible electronics. As the content of the Ni particles increased, the adhesion of the MLM slurry to the substrate was enhanced, allowing stencil printing [Figure 10C][111]. To prevent the LM leakage, hard magnetic particles of NdFeB were introduced into the LM, which can form a tight porous structure to immobilize the LM after magnetization[76]. Alternatively, heat treatment facilitated the formation of intermetallic compounds in the solid phase, thereby enhancing structural stability [Figure 10D][112]. Utilizing both the electroconductivity and magnetic responsiveness, the patented MLM circuits showed the integration of electric sensing and magnetic actuating. For example, the applied magnetic field not only actuated the MLM slurry-based coil robot but also induced a measurable voltage [Figure 10E][61], whose amplitude and frequency served as effective indicators for characterizing the magnetic actuation performance.
Furthermore, the MLM slurry was also found to have promising applications in biomedical engineering. The applied magnetic field enables precise regulation of the Young’s modulus, demonstrating reversible modulation across three orders of magnitude (kPa-MPa) with field intensity variation. This phenomenon originates from the formation of magnetic field-induced chain structures of Fe particles, which enable the rapid and reversible transition between soft and rigid states. Based on this, the MLM slurry-based needle can serve as a mechanically adaptive bioelectrode capable of matching diverse tissue stiffnesses, thereby minimizing trauma and scarring during implantation [Figure 10F][90]. In another work, the MLM slurry-based porous scaffold was introduced into bone tissue engineering[113]. The MLM scaffold showed good biocompatibility and enhanced mesenchymal stem cell osteogenic differentiation. Through magnetic field modulation, the scaffold’s dynamic stiffness promoted both osteogenesis and osseointegration in vivo. In addition, the MLM slurry can also serve as a flexible skin patch utilizing the enhanced surface adhesion across diverse substrates, including biological tissue [Figure 10G][114]. The flexible patch could effectively respond to AMFs, generating inductive heating for targeted therapy without spatial constraints. The patch adhered conformably to the tumor surface, enabling cryoablation, hyperthermia, and combined cryo-thermal therapy in vivo. Significant tumor growth inhibition and effective ablation observed via magnetic resonance imaging (MRI) confirmed the patch’s remarkable therapeutic efficacy.
MLM particle-based soft robots
Under ultrasound exposure, MLM bulk can be readily dispersed into nano/microparticles in solution[70,115]. These dispersed particles exhibit a high surface-to-volume ratio, enabling facile functionalization with drugs, biomolecules, or catalysts. In addition to their excellent electrical and thermal conductivity, MLM particles possess intrinsic magneto-responsiveness, photothermal conversion ability, and dynamic shape adaptability, which collectively provide versatile platforms for biomedical and environmental applications[116-118]. Their multifunctionality has been demonstrated across diverse scenarios, including minimally invasive neuromodulation, antibacterial treatment, and environmental remediation.
For instance, MLM nanoparticle-loaded calcium alginate microspheres (Fe@EGaIn/CA) were designed as multifunctional “nano-in-micro” theragnostic robots for transcatheter arterial chemoembolization [Figure 11A][119]. By integrating CT/magnetic resonance (MR) dual-modality imaging, photothermal/photodynamic responsiveness, drug-loading capability, and effective embolization, these microspheres achieve precise image-guided and laser-enhanced chemoembolization. In vitro and in vivo evaluations demonstrated their favorable biocompatibility, controllable drug release, and excellent therapeutic outcomes, including complete tumor eradication in rabbit models. The work highlights a generalized strategy for constructing fully flexible liquid-metal-based embolic platforms, offering promising clinical potential for multifunctional and precision cancer therapy[119].
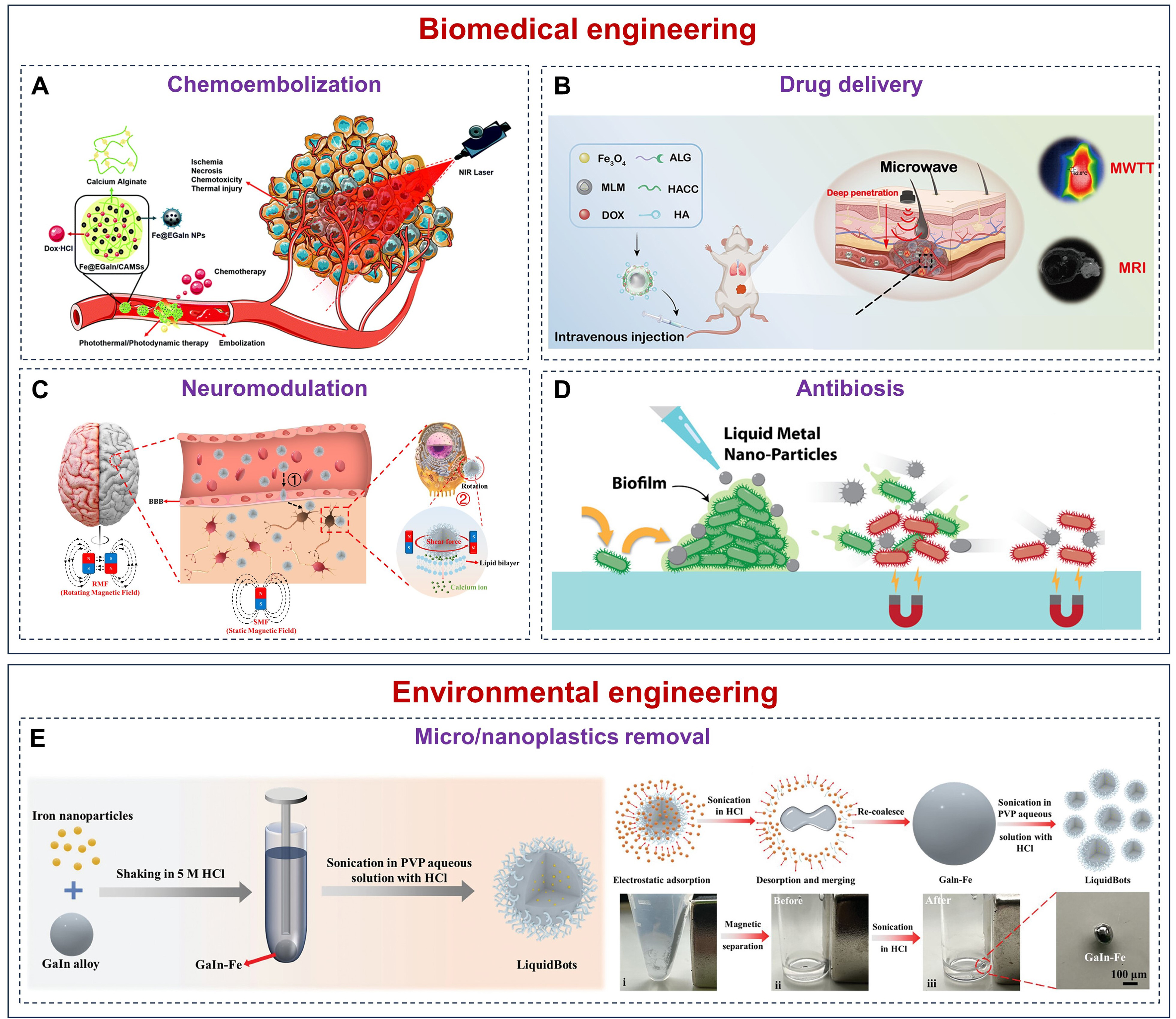
Figure 11. MLM particle-based soft robots. Medical MLM particles with the different functionalities, including (A) chemoembolization[119], (B) drug delivery[118], (C) neuromodulation[121], and (D) antibiosis[58]. Reprinted with permission[119]. Copyright 2021, Royal Society of Chemistry; Reprinted with permission[118]. Copyright 2024, American Chemical Society; Reprinted with permission[121]. Copyright 2024, American Chemical Society; Reprinted with permission[58]. Copyright 2020, American Chemical Society; Environmental MLM microrobots for (E) the removal of micro/nanoplastics[117]. Reprinted with permission. Copyright 2024, John Wiley and Sons. MLM: Magnetic liquid metal; NIR: near-infrared; MWTT: microwave thermal therapy; HACC: hydroxypropyltrimethyl ammonium chloride chitosan; HA: hyaluronic acid; MRI: magnetic resonance imaging; PVP: polyvinylpyrrolidone.
Furthermore, Liu et al. reported microwave absorption-based MLM nanorobots that enhanced microwave ablation by improving thermal conversion efficiency, generating reactive oxygen species (ROS) and depleting glutathione, and further inducing immunological cascades such as macrophage polarization and T-cell infiltration[120]. Moreover, they further reported a microwave-responsive transformable MLM nanorobots that enabled pH-sensitive drug release, endosomal escape through microwave-induced shape transformation, and MR imaging-guided synergistic chemo-thermotherapy, while also activating immune responses to suppress tumor growth and metastasis [Figure 11B][118]. Together, these studies highlight the potential of MLM nanorobots to integrate imaging, thermal therapy, drug delivery, and immunomodulation for effective cancer treatment.
Beyond oncotherapy, the less-than-10-μm MLM microrobots demonstrate remarkable functionality through their dynamic shape adaptation and precise magnetically-driven control via magnetic nanoparticle assembly and liquid-solid interactions [Figure 11C][121]. Wu et al. demonstrated through both in vitro and in vivo testing that these microrobots successfully crossed the blood-brain barrier and delivered mechanical stimulation to neurons under magnetic guidance for wireless neuromodulation therapy[121].
In addition to their therapeutic applications in vivo, MLM particles have also been explored as a promising next-generation antibacterial strategy. Under exposure to a low-intensity rotating magnetic field, these LM microparticle robots undergo dynamic shape transformations, forming nano-sharp edges capable of physically disrupting bacterial biofilms [Figure 11D][58]. The synergistic effect of magnetic manipulation and sharp-edge mechanical forces effectively ruptures both Gram-positive and Gram-negative bacterial cells while simultaneously degrading the biofilm matrix. Notably, this method achieved over 99% bacterial eradication within just 90 min of treatment[58]. This proof-of-concept study highlights the potential of LM-based magneto-mechanical systems as innovative antimicrobial therapies that circumvent antibiotic resistance by physically disrupting biofilms rather than relying on conventional chemical mechanisms.
Furthermore, MLM particle-based soft robots also demonstrate promising applications in environmental engineering. For example, Wu et al. utilized the MLM microparticle robots to effectively address the growing challenge of aquatic micro/nano plastic pollution [Figure 11E][117]. The MLM microrobots leverage a unique combination of electrostatic interactions and Ga2O3-mediated adhesion mechanisms to achieve an impressive 82.1% removal efficiency for plastic particulates. Their operation under low-intensity (3 mT) magnetic fields allows for precise, targeted plastic capture while minimizing energy consumption. The MLM microrobots can be recycled through sonication, which effectively overcomes the single-use limitation of conventional remediation. In addition, Wang et al. coated noble metal nanoparticles (Au/Ag) on MLM microrobots for catalytic activity, achieving remarkable efficiency in decomposing organic pollutants such as p-nitrophenol and methylene blue[116]. Magnetic fields enabled precise spatial-temporal control, allowing targeted pollutant degradation at predetermined locations while generating three-dimensional fluid convection that significantly enhances reaction kinetics. Experimental results reveal impressive catalytic rate constants and reduced reaction times, along with excellent recyclability through simple magnetic separation and base treatment.
LM composite-based soft robots
MLMs and pure LMs can be further integrated with other soft materials to enable a more flexible design and manipulation of soft robots. Typically, MLMs are encapsulated or dispersed within silicone elastomers to achieve functionalities such as stiffness regulation[122], magnetic reprogrammability[79], and energy conversion[101]. In contrast, pure LMs are often shaped into coil-like structures embedded in elastomers, serving as high-performance electromagnetic actuators that can exhibit fast response[123], high operational dimensionality[124], and self-sensing capabilities[125]. The LM composite-based soft robots exhibit diverse morphologies and tunable performance characteristics, demonstrating wide applications ranging from flexible grasping to invasive medical treatment.
Soft gripper is a soft robotic end-effector that adaptively grasps fragile or irregularly shaped objects without causing damage. Unlike the rigid gripper, it uses compliant materials like silicone elastomers to conform gently to various surfaces. These grippers are especially useful in fields such as biomedical devices, food handling, and logistics. Recently, LMs have been widely explored for developing advanced flexible grippers, enabling a new generation of intelligent and adaptive manipulation systems[126]. For example, the MLM was encapsulated within PDMS to fabricate a magnetically and thermally controlled soft structure with a regulatable stiffness[122]. Upon the application of a magnetic field, the stiffness can be rapidly increased by a factor of four, whereas solidifying the encapsulated MLM enhances stiffness by a factor of ten. The pneumatic soft gripper integrated with this structure exhibited tunable load capacity up to 450 g.
We have reported the dispersion of the MLM (NdFeB@InSnBi) microparticle into the elastomer to create a reprogrammable magnetic composite by mixing the MLM bulk with the elastomer precursor [Figure 12A][79]. Utilizing the phase transition of the InSnBi shell, the NdFeB microparticles can be reoriented to reprogram the magnetization profile. With magnetic reprogrammability and morphological reconfigurability, the corresponding gripper can grasp distinguished objects from 2D paper to 3D spitballs.
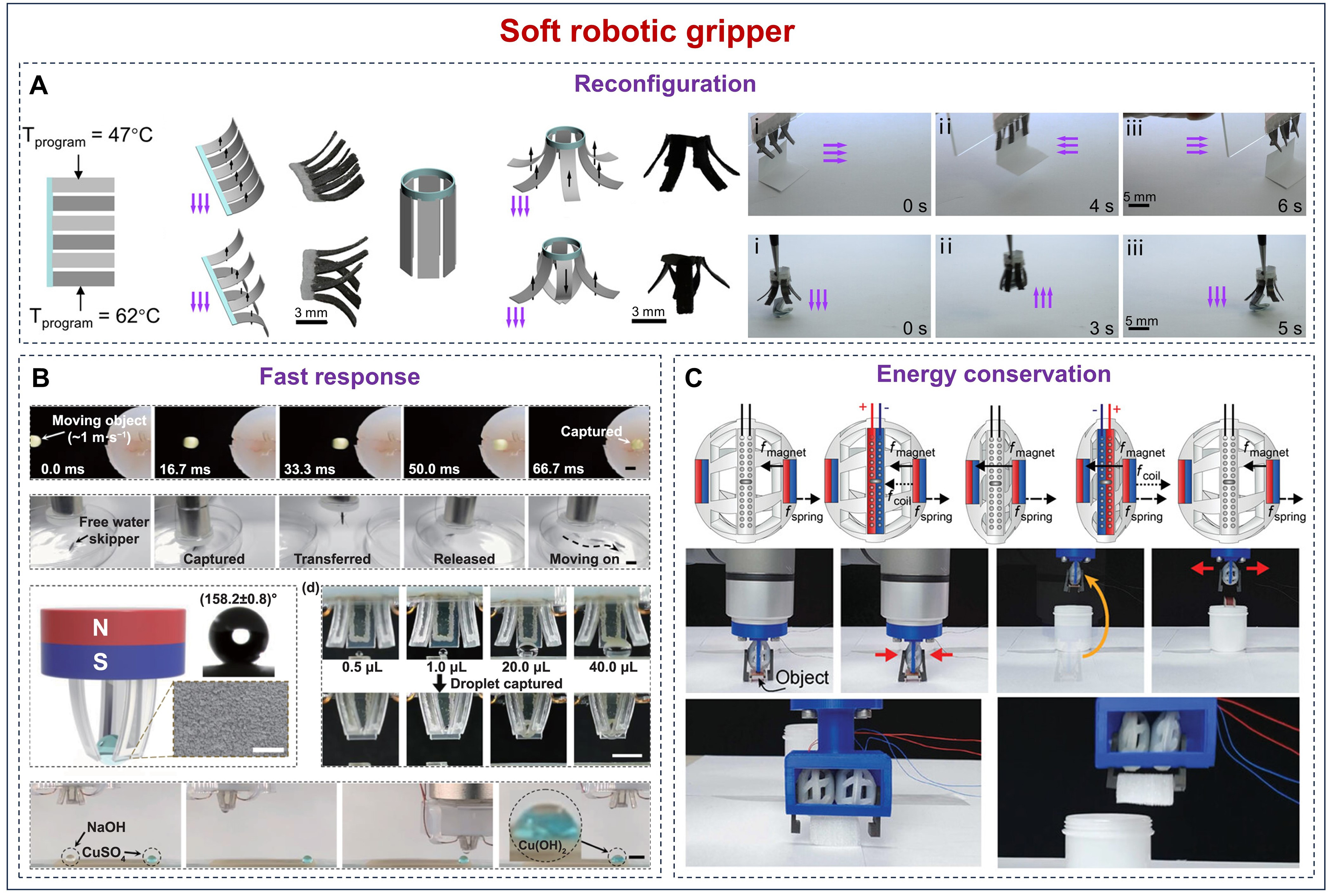
Figure 12. LM composite-based soft gripper. (A) Soft gripper with magnetic reprogrammability and morphological reconfigurability[79]. Reprinted with permission. Copyright 2023, John Wiley and Sons; Electromagnetic soft gripper with (B) fast response[127] or (C) mechanical bistable state[128]. Reprinted with permission[127]. Copyright 2024, IOP Publishing; Reprinted with permission[128]. Copyright 2023, John Wiley and Sons. LM: Liquid metal.
Moreover, electromagnetic soft grippers composed of LM circuits encapsulated in elastomer were also developed. A high-performance electromagnetic gripper was created with ultrathin LM circuits and low Young’s modulus silicone rubber, exhibiting an excellent deformation angle (265.25°) and bending angular velocity (284.66 rad·s-1) [Figure 12B][127]. This gripper can capture the fast-moving targets with a speed of
In addition to soft grippers, a series of LM composite-based magnetic soft robots with excellent locomotion performance was also developed for applications such as infrastructure inspection and environmental exploration. We demonstrated the multi-mode locomotion of the soft robot fabricated from reprogrammable MLM composite [Figure 13A][79]. With three distinguished magnetization profiles, the robot achieved three corresponding locomotion modes, including flipping, rolling, and crawling upon the dynamic magnetic field. Moreover, Maurin et al. developed the robots constructed from a liquid crystal elastomer-liquid metal (LCE-LM) composite and actuated by high-frequency AMFs, which achieved crawling and on-ground omnidirectional motion [Figure 13B][57]. Based on this structure, an untethered amphibious soft robot was further demonstrated, capable of multimodal locomotion across terrestrial and aquatic environments[101]. Two distinct mechanisms enable diverse motion: (i) reversible thermal bending via ultrafast induction heating, producing crawling, flipping, and surfacing behaviors; and (ii) Lorentz force generated in the conductive LM layer, enabling efficient on-water swimming.
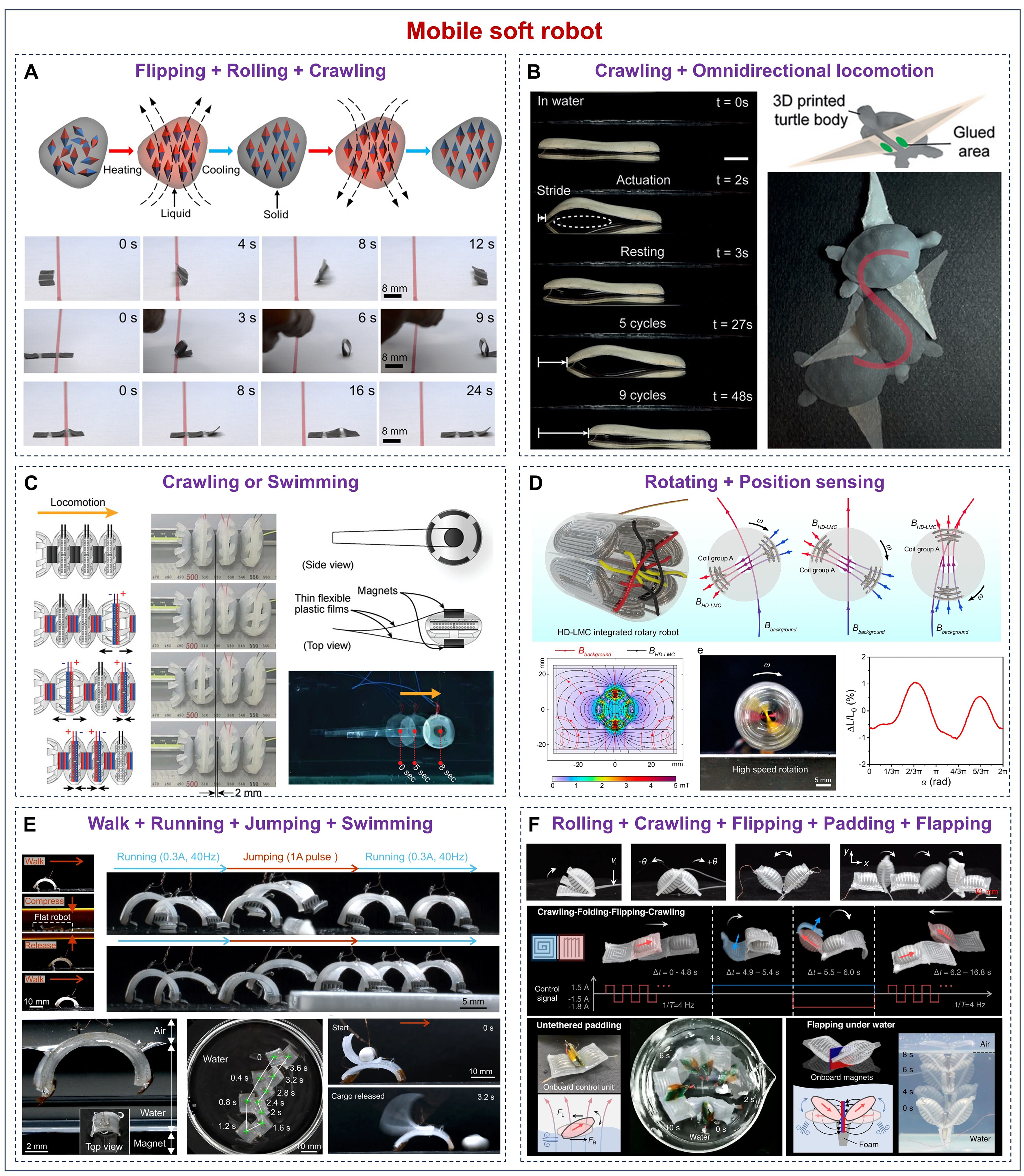
Figure 13. LM composite-based mobile soft robots. (A) Magnetic reprogrammable soft robots with three distinct locomotion modes[79]. Reprinted with permission. Copyright 2023, John Wiley and Sons; (B) LCE-LM-based soft robots. Reprinted with permission[57]. Copyright 2024, John Wiley and Sons; (C) Bistable electromagnetic actuator-based crawling and swimming soft robots[128]. Reprinted with permission. Copyright 2023, John Wiley and Sons; (D) Rotary robot composed of 3D LM coils encapsulated in PDMS with position sensing ability[125]. Reprinted with permission. Copyright 2024, Springer Nature; (E) A single electromagnetic robot with multimodal locomotion, including walking, running, swimming, and jumping[123]. Reprinted with permission. Copyright 2022, Springer Nature; (F) Self-vectoring electromagnetic soft robots with high operational dimensionality[124]. Reprinted with permission. Copyright 2023, Springer Nature. LM: Liquid metal; LCE: liquid crystal elastomer; PDMS: polydimethylsiloxane.
LM coil-based electromagnetic soft robots also attract much attention owing to their precisely controllable electrical input, enabling programmable and reliable actuation. For example, a crawling soft robot was designed by connecting three bistable electromagnetic actuators and a tail in series [Figure 13C][128]. The crawling locomotion is achieved through sequential expansion/contraction cycles of the bistable actuators coupled with asymmetric friction control, enabling directional movement at 6 mm·s-1. The authors developed a swimming robot by attaching two flexible plastic sheets to two sides of a bistable electromagnetic actuator. The swimming robot achieved 5.75 mm·s-1 propulsion underwater through vibration-driven tail deflection. In addition, Li et al. developed a high-speed rotary robot composed of 3D LM coils encapsulated in PDMS with position-sensing ability [Figure 13D][125]. The robot employs six magnetically actuated units in a wheel configuration with a three-phase sinusoidal current drive, achieving precise rotational control while integrating real-time position/velocity feedback via eddy-current inductance sensing and slip-ring wire management.
The single electromagnetic soft robot with multiple modes of locomotion has been developed by refining structural design and programming electrical current manipulation. An ultrafast soft electromagnetic robot was created utilizing the curved elastomeric bilayers with embedded LM coils, achieving multimodal locomotion including walking, running, swimming, and jumping [Figure 13E][123]. The resonant-driven design enables record speeds of 70 body length (BL)·s-1 for running and 4.8 BL·s-1 for swimming, while integrated 3D-printed sawtooth or L-shaped feet provide substrate-adaptive motion control across diverse terrains. Moreover, a self-vectoring electromagnetic soft robot was presented that enabled instant reprogramming of electromagnetic vectors, achieving high-dimensional control through synchronous current manipulation of modular sub-domains [Figure 13F][124]. Rolling locomotion was the fundamental capability for a single actuator module, which can achieve continuous omnidirectional rotation at ~27 rad·s-1. Soft robots composed of two actuator modules exhibited both crawling and flipping locomotion, with the gait switch achieved through foldable shape morphing. The same robotic design also enabled paddling locomotion on the water surface and flapping motion underwater.
Soft robots based on LM composites have also shown promising applications in biomedical engineering.
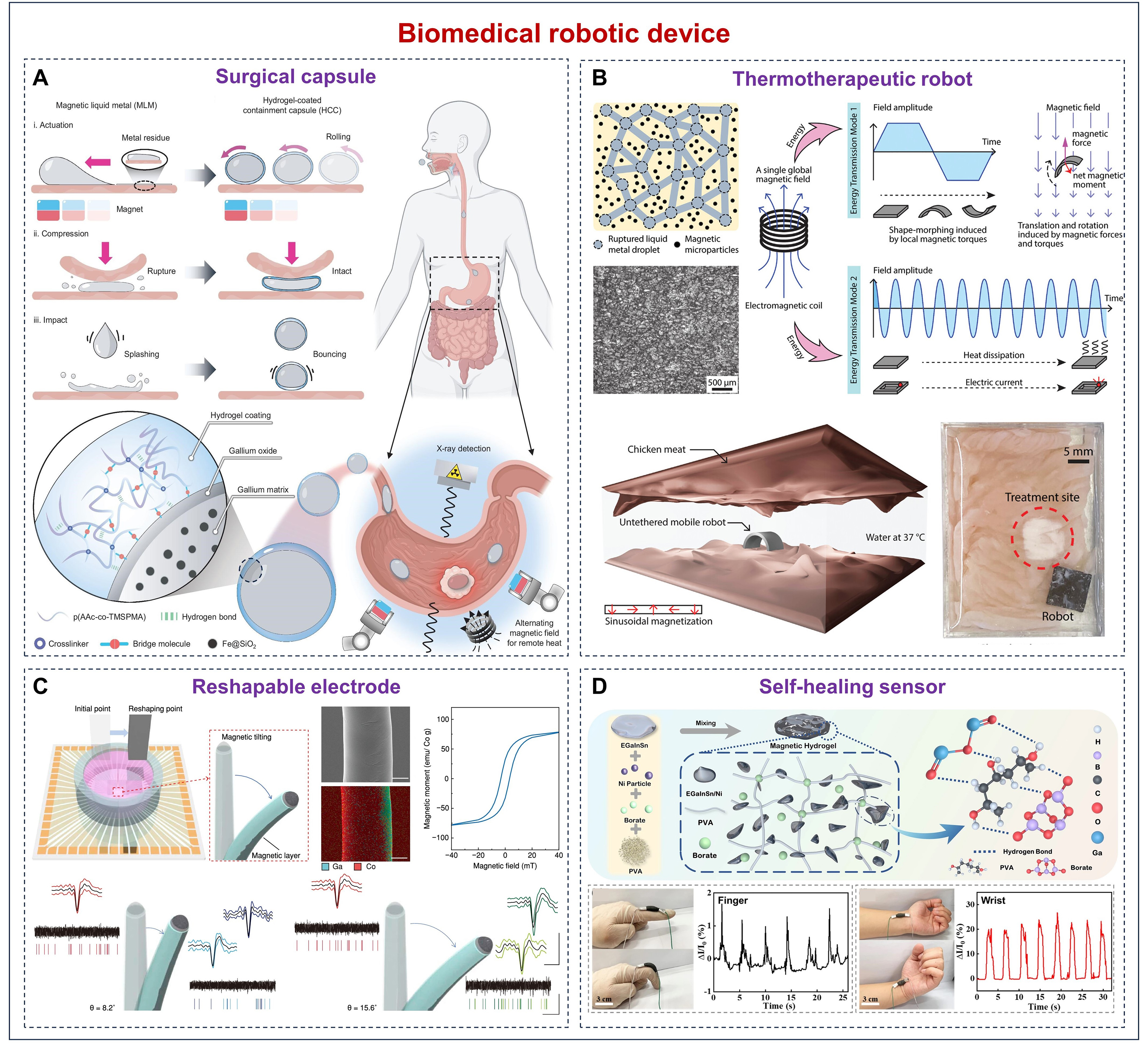
Figure 14. LM composite-based robotic devices for biomedical engineering. (A) Hydrogel-coated MLM droplet for remote gastrointestinal operation[129]. Reprinted with permission. Copyright 2025, Oxford University Press; (B) Miniature untethered magnetic robots with dual-energy transmission mode[94]. Reprinted with permission. Copyright 2022, John Wiley and Sons; (C) Magnetically shapable 3D multi-electrode arrays for electrophysiological analysis[130]. Reprinted with permission. Copyright 2025, Springer Nature; (D) Self-healing LM magnetic hydrogels for wearable sensors[131]. Reprinted with permission. Copyright 2023, Springer Nature. LM: Liquid metal; MLM: magnetic liquid metal; PVA: polyvinyl alcohol.
Moreover, a magnetically re-shapable 3D multi-electrode array fabricated from magnetic LM composite was proposed for minimally invasive electrophysiological monitoring of brain organoids, overcoming limitations of rigid probes that damage 3D cytoarchitecture [Figure 14C][130]. The soft LM electrodes, with Young’s modulus matching neural tissue and Pt nanocluster-coated tips for enhanced signal fidelity, enable chronic recording of intra-organoid signals across customizable 3D coordinates. A key innovation is magnetic reshaping via ferromagnetic cobalt layers, allowing single electrodes to tilt up to 51.6° and cover 891 times larger detection areas (6.994 × 104 μm2) for multi-spot neural mapping without physical electrode additions. Additionally, a polyvinyl alcohol (PVA)/LM (GaInSn-Ni) composite hydrogel was presented that integrates stretchability (> 800% strain), rapid autonomous self-healing via hydrogen bonds and LM fusion, and magnetic field-guided mobility [Figure 14D][131]. When deployed as wearable sensors for motion and health monitoring, the LM hydrogel demonstrates remarkable sensitivity to finger bending and wrist flexion, producing stable and reproducible current-time curves that correlate precisely with joint angle. Magnetic responsiveness adds another dimension to its sensing versatility, allowing remote repositioning of sensor elements through applied magnetic fields, which could enable adaptive sensor networks for dynamic motion capture scenarios.
CONCLUSIONS AND OUTLOOK
LMs exhibit comprehensive advantages, such as fluidic deformability, high metallic electrical/thermal conductivity, and facile processability, making them highly promising for applications in soft robotics. Magnetic manipulation of LMs presents a highly attractive approach for soft robotics due to its non-contact nature, high spatial precision, and compatibility with diverse environments. A substantial body of related work has emerged, significantly advancing the development of this field. Here, we present a comprehensive summary of magnetically manipulated LM-based soft robots, including their fabrication, mechanisms, and applications. We commence with the preparation methods for MLMs and patterning methods for LMs. Then, the mechanisms of magnet manipulation (via permanent magnets or electromagnets) and Lorentz force manipulation are discussed, along with auxiliary manipulation methods utilizing other physical fields, such as electric fields. Finally, we demonstrate the applications of the four types of magnetically manipulated LM-based soft robots (i.e., droplet, slurry, particle, and composite), from flexible electronics to biomedical engineering.
Our classification framework for LM-based soft robots is based primarily on the functional form, operational characteristics, and compositional state, rather than rigid distinctions in final material composition. It is important to note that given the inherent overlap among material states in this emerging field, completely mutually exclusive categories are difficult to establish. For instance, a slurry-based robot, while technically a composite of LM and magnetic particles, is categorized based on its key operational behaviors originating from slurry-like rheology and flow characteristics. Similarly, a composite-based robot might be fabricated by mixing LM slurry with an elastomer, but its final classification is determined by its solid-state functional form. This type-oriented framework could offer a clear and practical method to organize and understand the diverse array of representative systems currently under development. To provide a comprehensive overview of the proposed classification framework, Table 2 summarizes the distinct compositions, key characteristics, and representative applications of these four types. Despite remarkable advances, persisting challenges stand as both obstacles and opportunities, demanding urgent solutions to propel this field forward.
Summary of characteristics and applications of magnetically manipulated LM soft robots
| Type | Composition and morphology | Key characteristics | Typical applications |
| Droplet | Composition: low magnetic particle content (< 10 wt%) | High fluidity (surface tension, reversible splitting and merging, and deformation) | Microfluidics (valves and pumps) |
| Reconfigurable electronics | |||
| Morphology: spherical droplets dominated by surface tension | Excellent electrical conductivity | Biomedical engineering (injectable therapy, ECG electrodes) | |
| Slurry | Composition: high magnetic particle content (> 10 wt%) | Tunable stiffness | Soft grippers |
| Plasticity | Printable circuits | ||
| Morphology: viscoelastic paste or semi-solid | Good printability | Biomedical engineering (adaptive bioelectrodes, bone scaffolds, skin patches) | |
| Spike formation | |||
| Particle | Composition: surface modification | High chemical reactivity and functionalization potential | Environmental engineering (microplastic removal, pollutant decomposition) |
| Morphology: nano- or micro-scale particles | Photothermal/magnetothermal conversion | Biomedical engineering (chemoembolization, neuromodulation, antibiosis) | |
| Ability to cross biological barriers | |||
| Composite | Composition: encapsulated in soft elastomers | Leakage-free and structurally stable | Soft grippers |
| High operational dimensionality | Mobile robots | ||
| Morphology: solid-state soft structures | Integration of sensing and actuation | Biomedical engineering (surgical capsules, wearable sensors) |
Material optimization
Although MLMs can be effectively prepared via mechanical or chemical methods, concerns remain regarding their structural and performance stability. In mechanical mixing, repeated rupture and reformation of the native oxide layer on LM surfaces facilitate the incorporation of magnetic particles[61,64]. However, excessive oxide formation can increase the viscosity of the MLMs and compromise their electrical conductivity. Under harsh conditions, such as strong NaOH solutions, degradation of the oxide layer can lead to the detachment of particles from the LM matrix[64]. Conversely, chemical approaches such as reactive wetting can suppress oxidation. Yet prolonged interfacial contact between the magnetic particles and the LM matrix (or their metallic shells) may induce intermetallic diffusion and compound formation, degrading the magnetic performance[74]. Moreover, the aggregation and sedimentation of inner magnetic particles within the LM matrix often happen due to the magnetic attraction and density difference between the magnetic particles and the LM matrix. The introduction of shell structures (e.g., silica or polymer[132]) is a promising strategy that can improve suspension stability, prevent alloying between magnetic particles and LM matrix, and also reduce magnetic agglomeration.
The most critical factor for using LM platforms in the body is their biocompatibility, which has been a subject of extensive investigation[32]. Gallium-based LMs, such as EGaIn and Galinstan alloys, are generally considered to exhibit favorable biocompatibility profiles. Their low cytotoxicity has been demonstrated in various in vitro studies, where cells remain viable and continue to proliferate upon exposure to bulk LM[133,134]. However, extrapolating these findings to the complex physiological environment remains a significant challenge that has not yet been adequately addressed. Biocompatibility is not absolute and is highly contingent upon dosage, exposure time, and physical form. A critical unresolved issue is the dynamic stability of the LM surface oxide layer in vivo[135,136]. Unlike in controlled laboratory settings, physiological fluids contain high concentrations of electrolytes, proteins, and varying pH levels, which can induce the dissolution, reconstruction, or passivation of the protective oxide skin.
This surface instability presents two critical risks. Firstly, compromising the oxide barrier accelerates metal ion leaching. The chronic release of gallium and indium, alongside potentially more cytotoxic ions from the corrosion of embedded magnetic particles (e.g., Fe, Ni, or Nd), warrants profound scrutiny concerning long-term bioaccumulation and immune response[33,136]. Secondly, the corrosion of magnetic particles due to oxide failure could lead to a progressive degradation of magnetic responsiveness over time, compromising device functionality. Therefore, future research must move beyond acute in vitro cytotoxicity. Rigorous long-term in vivo assessments focusing on the dynamic interplay between the LM surface, ion release kinetics, and magnetic performance stability are urgently needed. Robust surface modification, composition optimization, and encapsulation strategies must be actively explored to enhance LM biocompatibility and functional durability for genuine biomedical applications[137,138].
Precise manipulation
Achieving precise magnetic manipulation of LM-based soft robots still faces numerous difficulties and challenges. The intrinsic fluidity and high deformability of LMs make their dynamic response to magnetic fields highly nonlinear and difficult to predict. Existing research is largely confined to the qualitative or semi-quantitative depiction of the manipulation mechanism. This lack of systematic quantitative analysis and generalized mathematical models severely hinders the ability to establish predictive relationships. Moreover, the strong sensitivity of LMs to external conditions, such as viscosity changes caused by temperature fluctuations or interactions with surrounding media, further reduces control reliability. At the system level, real-time feedback and sensing present additional hurdles, since monitoring the continuously changing morphology of LM under actuation is far from trivial.
Tackling these challenges requires a concerted and multidisciplinary approach, involving digitally-enabled quantitative analysis, the implementation of advanced control strategies, and innovations in material science. Specifically, it is imperative to establish a comprehensive quantitative framework, including both a mathematical model and experimental validation, to govern magnetic field-particle interactions within MLM systems and establish predictive relations between Lorentz force parameters and LM dynamics. To this end, adopting standardized quantitative metrics is essential for enabling rigorous performance benchmarking across different studies. Such standardization will provide a common language for the community, facilitating reproducible research and the systematic evolution of next-generation LM soft robots. In addition, closed-loop feedback systems that integrate real-time imaging or embedded sensors could significantly improve accuracy and robustness by continuously adjusting the applied magnetic fields. Machine learning-based control algorithms may help model and compensate for nonlinear dynamics, enabling more reliable trajectory planning. On the materials side, surface modification or alloying strategies may enhance the stability and tunability of LMs under magnetic manipulation. In parallel, the design of multi-coil or gradient magnetic field systems could provide finer spatial resolution and greater control flexibility. By synergistically advancing control methods, sensing technologies, and material engineering, the precise and reliable magnetic manipulation of LM soft robots could gradually become achievable.
Synergistic multi-field manipulation, which integrates magnetic fields with other physical stimuli (electric, thermal, or acoustic), holds immense promise for achieving complex, versatile, and highly programmable LM responses that far exceed the capabilities of single-field approaches. However, despite this potential, research in this domain remains in its nascent stages. Current studies suggest the feasibility of concurrent actuation rather than delving into deep synergistic coupling, leaving a significant knowledge gap regarding the complex interplay between distinct physical fields within dynamic LM systems. To bridge this gap, future investigations must move beyond investigating mere additive effects and prioritize unravelling the underlying mechanisms of cross-field interactions. Specifically, understanding how competing or cooperative forces influence LM fluid dynamics and surface tension under simultaneous stimulation will be pivotal for developing truly sophisticated, multi-functional LM platforms.
Future applications
Magnetically manipulated LM soft robots have already demonstrated numerous experimental applications in biomedicine, electronics, and environmental engineering. Looking further ahead, magnetically manipulated LM soft robots could become integral to futuristic technologies. They may function as self-assembling, shape-shifting swarms capable of forming temporary structures on demand-bridges, barriers, or even electronic circuits that assemble and disassemble as needed. In space exploration, their ability to flow, reconfigure, and self-heal could allow them to adapt to extreme environments, repairing spacecraft hulls or navigating extraterrestrial terrains where conventional robots would fail. Moreover, hybrid robots that integrate LMs with biological systems could combine self-healing, adaptability, and reconfigurable functions, enabling seamless interaction with living tissues. Such bio-hybrid platforms may one day evolve into adaptive implants, artificial organs, or even novel life-like entities that blur the boundary between biology and machine.
DECLARATIONS
Authors’ contributions
Led the manuscript writing and figure preparation: Chen, G.; Ma, B.; He, Y.; Yang, W.; Liu, H.
Designed and composed the content of the manuscript: Chen, G.; Ma, B.; He, Y.
Supervised the overall structure, provided critical feedback, and finalized the manuscript: Ma, B.; He, Y.; Liu, H.
All authors discussed and approved the final version of the manuscript.
Availability of data and materials
Not applicable.
Financial support and sponsorship
The authors gratefully acknowledge financial support from the China Postdoctoral Science Foundation (2025T180784), the Jiangsu Provincial Scientific Research Center of Applied Mathematics (BK20233002), the Postgraduate Research & Practice Innovation Program of Jiangsu Province (KYCX24_0473), and the SEU Innovation Capability Enhancement Plan for Doctoral Students (CXJH_SEU 24144). This work was also partially supported by the Deakin University Postdoctoral Research Fellowship (DUPRF).
Conflicts of interest
All authors declared that there are no conflicts of interest.
Ethical approval and consent to participate
Not applicable.
Consent for publication
Not applicable.
Copyright
© The Author(s) 2026.
REFERENCES
2. Zhang, S.; Ke, X.; Jiang, Q.; Chai, Z.; Wu, Z.; Ding, H. Fabrication and functionality integration technologies for small-scale soft robots. Adv. Mater. 2022, 34, e2200671.
3. Hegde, C.; Su, J.; Tan, J. M. R.; He, K.; Chen, X.; Magdassi, S. Sensing in soft robotics. ACS. Nano. 2023, 17, 15277-307.
4. Tan, Y. J.; Mengaldo, G.; Laschi, C. Artificial muscles for underwater soft robots: materials and their interactions. Annu. Rev. Condens. Matter. Phys. 2024, 15, 45-61.
5. Kulkarni, M.; Edward, S.; Golecki, T.; Kaehr, B.; Golecki, H. Soft robots built for extreme environments. Soft. Sci. 2025, 5, 12.
6. Wu, M.; Afridi, W. H.; Wu, J.; et al. Octopus-inspired underwater soft robotic gripper with crawling and swimming capabilities. Research 2024, 7, 0456.
7. Xie, Z.; Yuan, F.; Liu, J.; et al. Octopus-inspired sensorized soft arm for environmental interaction. Sci. Robot. 2023, 8, eadh7852.
8. Yue, T.; Lu, C.; Tang, K.; et al. Embodying soft robots with octopus-inspired hierarchical suction intelligence. Sci. Robot. 2025, 10, eadr4264.
9. Zhu, M.; Biswas, S.; Dinulescu, S. I.; Kastor, N.; Hawkes, E. W.; Visell, Y. Soft, wearable robotics and haptics: technologies, trends, and emerging applications. Proc. IEEE. 2022, 110, 246-72.
10. Yin, S.; Yao, D. R.; Song, Y.; et al. Wearable and implantable soft robots. Chem. Rev. 2024, 124, 11585-636.
11. Bliah, O.; Hegde, C.; Tan, J. M. R.; Magdassi, S. Fabrication of soft robotics by additive manufacturing: from materials to applications. Chem. Rev. 2025, 125, 7275-320.
12. Ren, L.; Xu, X.; Du, Y.; Kalantar-zadeh, K.; Dou, S. X. Liquid metals and their hybrids as stimulus-responsive smart materials. Mater. Today. 2020, 34, 92-114.
13. Li, N.; Yuan, X.; Li, Y.; et al. Bioinspired liquid metal based soft humanoid robots. Adv. Mater. 2024, 36, e2404330.
14. He, Y.; You, J.; Dickey, M. D.; Wang, X. Controllable flow and manipulation of liquid metals. Adv. Funct. Materials. 2024, 34, 2309614.
15. Qi, J.; Yang, S.; Jiang, Y.; et al. Liquid metal-polymer conductor-based conformal cyborg devices. Chem. Rev. 2024, 124, 2081-137.
17. Wang, H.; Chen, S.; Yuan, B.; Liu, J.; Sun, X. Liquid metal transformable machines. Acc. Mater. Res. 2021, 2, 1227-38.
18. Chen, G.; Ma, B.; Chen, Y.; et al. A stretchable liquid metal switch for interactive and autonomous soft machines. Int. J. Extrem. Manuf. 2026, 8, 015510.
19. Li, G.; Zhang, M.; Liu, S.; et al. Three-dimensional flexible electronics using solidified liquid metal with regulated plasticity. Nat. Electron. 2023, 6, 154-63.
20. Wan, C.; Liu, Y.; Li, X.; Xu, H.; Guo, R.; Liu, J. Interfacial adhesion effects of liquid metal printed electronics on general substrates: mechanisms and applications. InfoMat 2025, 7, e70029.
21. Li, G.; Liu, S.; Xu, Z.; Guo, J.; Tang, S.; Ma, X. Recent advancements in liquid metal enabled flexible and wearable biosensors. Soft. Sci. 2023, 3, 37.
22. Wang, H.; Xing, W.; Chen, S.; Song, C.; Dickey, M. D.; Deng, T. Liquid metal composites with enhanced thermal conductivity and stability using molecular thermal linker. Adv. Mater. 2021, 33, e2103104.
23. Yao, Y.; Li, W.; Liu, J.; Deng, Z. Liquid metal phase change materials for thermal management of electronics. Adv. Phys. X. 2024, 9, 2324910.
24. Ma, J.; Krisnadi, F.; Vong, M. H.; Kong, M.; Awartani, O. M.; Dickey, M. D. Shaping a soft future: patterning liquid metals. Adv. Mater. 2023, 35, e2205196.
25. Zhu, J.; Li, J.; Tong, Y.; et al. Recent progress in multifunctional, reconfigurable, integrated liquid metal-based stretchable sensors and standalone systems. Prog. Mater. Sci. 2024, 142, 101228.
26. Kim, H.; Zan, G.; Seo, Y.; Lee, S.; Park, C. Stimuli‐responsive liquid metal hybrids for human‐interactive electronics. Adv. Funct. Mater. 2024, 34, 2308703.
27. Chen, S.; Wang, H.; Zhao, R.; Rao, W.; Liu, J. Liquid metal composites. Matter 2020, 2, 1446-80.
28. Chen, S.; Wang, H.; Liu, T.; Liu, J. Liquid metal smart materials toward soft robotics. Adv. Intell. Syst. 2023, 5, 2200375.
29. Liang, F.; Tee, B. C. K. Functional liquid metal polymeric composites: fundamentals and applications in soft wearable electronics. Adv. Funct. Mater. 2024, 34, 2400284.
30. Lee, S.; Jaseem, S. A.; Atar, N.; et al. Connecting the dots: sintering of liquid metal particles for soft and stretchable conductors. Chem. Rev. 2025, 125, 3551-85.
31. Wang, L.; Lai, R.; Zhang, L.; Zeng, M.; Fu, L. Emerging liquid metal biomaterials: from design to application. Adv. Mater. 2022, 34, e2201956.
32. Chen, S.; Zhao, R.; Sun, X.; Wang, H.; Li, L.; Liu, J. Toxicity and biocompatibility of liquid metals. Adv. Healthc. Mater. 2023, 12, e2201924.
33. Handschuh-Wang, S.; Wang, T.; Gancarz, T.; et al. The liquid metal age: a transition from Hg to Ga. Adv. Mater. 2024, 36, e2408466.
34. Wang, D.; Xu, W.; Liu, Y.; et al. Liquid metal gallium pharmaceuticals. Theranostics 2025, 15, 8795-821.
35. Khan, M. R.; Eaker, C. B.; Bowden, E. F.; Dickey, M. D. Giant and switchable surface activity of liquid metal via surface oxidation. Proc. Natl. Acad. Sci. U. S. A. 2014, 111, 14047-51.
36. Eaker, C. B.; Hight, D. C.; O’Regan, J. D.; Dickey, M. D.; Daniels, K. E. Oxidation-mediated fingering in liquid metals. Phys. Rev. Lett. 2017, 119, 174502.
37. Yun, F. F.; Yu, Z.; He, Y.; et al. Voltage-induced penetration effect in liquid metals at room temperature. Natl. Sci. Rev. 2020, 7, 366-72.
38. He, Y.; You, J.; Dickey, M. D.; Wang, X. Liquid-metal transfer from an anode to a cathode without short circuiting. Nat. Chem. Eng. 2024, 1, 293-300.
39. Handschuh-Wang, S.; Chen, Y.; Zhu, L.; Gan, T.; Zhou, X. Electric actuation of liquid metal droplets in acidified aqueous electrolyte. Langmuir 2019, 35, 372-81.
40. Babatain, W.; Park, C.; Harraz, D. M.; et al. Programmable continuous electrowetting of liquid metal for reconfigurable electronics. Adv. Mater. 2026, 38, e06383.
41. Kim, D.; Jeong, J.; Chung, S. K.; Lee, J. B. Magnetic liquid metals: a review. Adv. Funct. Mater. 2024, 34, 2311153.
42. Shen, Y.; Jin, D.; Li, T.; Yang, X.; Ma, X. Magnetically responsive gallium-based liquid metal: preparation, property and application. ACS. Nano. 2024, 18, 20027-54.
43. Xiang, W.; Lu, Y.; Wang, H.; et al. Liquid-metal-based magnetic fluids. Nat. Rev. Mater. 2024, 9, 433-49.
44. Ito, R.; Dodbiba, G.; Fujita, T. Mr fluid of liquid gallium dispersing magnetic particles. Int. J. Mod. Phys. B. 2005, 19, 1430-6.
45. Chen, J.; Jin, D.; Wang, Q.; Ma, X. Programming ferromagnetic soft materials for miniature soft robots: design, fabrication, and applications. J. Mater. Sci. Technol. 2025, 219, 271-87.
46. Ma, B.; Xu, C.; Chi, J.; Chen, J.; Zhao, C.; Liu, H. A versatile approach for direct patterning of liquid metal using magnetic field. Adv. Funct. Mater. 2019, 29, 1901370.
47. Hu, W.; Lum, G. Z.; Mastrangeli, M.; Sitti, M. Small-scale soft-bodied robot with multimodal locomotion. Nature 2018, 554, 81-5.
48. Yang, Z.; Xu, C.; Lee, J. X.; Lum, G. Z. Magnetic miniature soft robot with reprogrammable drug-dispensing functionalities: toward advanced targeted combination therapy. Adv. Mater. 2024, 36, e2408750.
49. Wang, X.; Mao, G.; Ge, J.; et al. Untethered and ultrafast soft-bodied robots. Commun. Mater. 2020, 1, 67.
50. Li, X.; Li, S.; Lu, Y.; et al. Programmable digital liquid metal droplets in reconfigurable magnetic fields. ACS. Appl. Mater. Interfaces. 2020, 12, 37670-9.
51. Jeong, J.; Lee, J. B.; Chung, S. K.; Kim, D. Electromagnetic three dimensional liquid metal manipulation. Lab. Chip. 2019, 19, 3261-7.
52. Chang, H.; Guo, R.; Sun, Z.; et al. Direct writing and repairable paper flexible electronics using nickel-liquid metal ink. Adv. Materials. Inter. 2018, 5, 1800571.
53. Varga, M.; Ladd, C.; Ma, S.; Holbery, J.; Tröster, G. On-skin liquid metal inertial sensor. Lab. Chip. 2017, 17, 3272-8.
54. Shen, Y.; Jin, D.; Fu, M.; et al. Reactive wetting enabled anchoring of non-wettable iron oxide in liquid metal for miniature soft robot. Nat. Commun. 2023, 14, 6276.
55. He, Y.; Tang, J.; Kalantar-Zadeh, K.; Dickey, M. D.; Wang, X. Noncontact rotation, levitation, and acceleration of flowing liquid metal wires. Proc. Natl. Acad. Sci. U. S. A. 2022, 119, e2117535119.
56. Wang, D.; Gao, C.; Wang, W.; et al. Shape-transformable, fusible rodlike swimming liquid metal nanomachine. ACS. Nano. 2018, 12, 10212-20.
57. Maurin, V.; Chang, Y.; Ze, Q.; Leanza, S.; Wang, J.; Zhao, R. R. Liquid crystal elastomer-liquid metal composite: ultrafast, untethered, and programmable actuation by induction heating. Adv. Mater. 2024, 36, e2302765.
58. Elbourne, A.; Cheeseman, S.; Atkin, P.; et al. Antibacterial liquid metals: biofilm treatment via magnetic activation. ACS. Nano. 2020, 14, 802-17.
59. Wang, H.; Chen, S.; Li, H.; et al. A liquid gripper based on phase transitional metallic ferrofluid. Adv. Funct. Mater. 2021, 31, 2100274.
60. Kim, S.; Park, Y. G.; Kim, J. Y.; et al. Magnetic manipulation of locomotive liquid electrodes for wireless active cardiac monitoring. ACS. Appl. Mater. Interfaces. 2023, 15, 28954-63.
61. Cao, L.; Yu, D.; Xia, Z.; et al. Ferromagnetic liquid metal putty-like material with transformed shape and reconfigurable polarity. Adv. Mater. 2020, 32, e2000827.
62. Jeon, J.; Lee, J.; Chung, S. K.; Kim, D. Magnetic liquid metal marble: characterization of lyophobicity and magnetic manipulation for switching applications. J. Microelectromech. Syst. 2016, 25, 1050-7.
63. Chen, H.; Xie, Y.; Qiao, K.; et al. Thermomagnetic liquid metal switches with fast bidirectional response. Nat. Commun. 2025, 16, 2634.
64. Chang, H.; Zhang, P.; Guo, R.; et al. Recoverable liquid metal paste with reversible rheological characteristic for electronics printing. ACS. Appl. Mater. Interfaces. 2020, 12, 14125-35.
65. Wang, D.; Wang, X.; Rao, W. Precise regulation of Ga-based liquid metal oxidation. Acc. Mater. Res. 2021, 2, 1093-103.
66. Feng, D.; Ma, B.; Xu, C.; et al. Renewable electrode array based on transformable metal for scaling up DNA synthesis and manipulation. Adv. Funct. Mater. 2026, 36, e13703.
67. Jung, W.; Vong, M. H.; Kwon, K.; et al. Giant decrease in interfacial energy of liquid metals by native oxides. Adv. Mater. 2024, 36, e2406783.
68. Wu, D.; Liu, D.; Tian, X.; et al. A universal mechanochemistry allows on-demand synthesis of stable and processable liquid metal composites. Small. Methods. 2022, 6, e2200246.
69. Xing, W.; Chen, S.; Wang, H.; et al. Construction of 3D conductive network in liquid gallium with enhanced thermal and electrical performance. Adv. Mater. Technol. 2022, 7, 2100970.
70. Lin, Y.; Genzer, J.; Dickey, M. D. Attributes, fabrication, and applications of gallium-based liquid metal particles. Adv. Sci. 2020, 7, 2000192.
71. Yang, C.; Bian, X.; Qin, J.; Guo, T.; Zhao, X. Metal-based magnetic functional fluids with amorphous particles. RSC. Adv. 2014, 4, 59541-7.
72. Kim, D.; Lee, J. Magnetic-field-induced liquid metal droplet manipulation. J. Korean. Phys. Soc. 2015, 66, 282-6.
73. Chen, R.; Xiong, Q.; Song, R.; et al. Magnetically controllable liquid metal marbles. Adv. Mater. Interfaces. 2019, 6, 1901057.
74. Lu, Y.; Che, Z.; Sun, F.; et al. Mussel-inspired multifunctional integrated liquid metal-based magnetic suspensions with rheological, magnetic, electrical, and thermal reinforcement. ACS. Appl. Mater. Interfaces. 2021, 13, 5256-65.
75. Tang, J.; Zhao, X.; Li, J.; Zhou, Y.; Liu, J. Liquid metal phagocytosis: intermetallic wetting induced particle internalization. Adv. Sci. 2017, 4, 1700024.
76. Lu, Y.; Yu, D.; Dong, H.; et al. Dynamic leakage‐free liquid metals. Adv. Funct. Mater. 2023, 33, 2210961.
77. Carle, F.; Bai, K.; Casara, J.; Vanderlick, K.; Brown, E. Development of magnetic liquid metal suspensions for magnetohydrodynamics. Phys. Rev. Fluids. 2017, 2, 013301.
78. Zhu, H.; Wang, S.; Zhang, M.; Li, T.; Hu, G.; Kong, D. Fully solution processed liquid metal features as highly conductive and ultrastretchable conductors. npj. Flex. Electron. 2021, 5, 123.
79. Chen, G.; Ma, B.; Zhang, J.; Chen, Y.; Liu, H. Reprogrammable magnetic soft robots based on low melting alloys. Adv. Intell. Syst. 2023, 5, 2300173.
80. Zhao, R.; Dai, H.; Yao, H. Liquid-metal magnetic soft robot with reprogrammable magnetization and stiffness. IEEE. Robot. Autom. Lett. 2022, 7, 4535-41.
81. Gao, X.; Su, J.; Xu, C.; et al. Water-based continuous fabrication of highly elastic electromagnetic fibers. ACS. Nano. 2024, 18, 17913-23.
82. Mao, G.; Drack, M.; Karami-Mosammam, M.; et al. Soft electromagnetic actuators. Sci. Adv. 2020, 6, eabc0251.
83. Ma, J.; Vaghani, D. P.; Im, S.; et al. Injection molding of liquid metal by harnessing nonstick molds. ACS. Appl. Mater. Interfaces. 2024, 16, 10931-41.
84. Lin, Y.; Gordon, O.; Khan, M. R.; Vasquez, N.; Genzer, J.; Dickey, M. D. Vacuum filling of complex microchannels with liquid metal. Lab. Chip. 2017, 17, 3043-50.
85. Kohls, N.; Abdeally, I.; Ruddy, B. P.; Mazumdar, Y. C. Design of a xenia coral robot using a high-stroke compliant linear electromagnetic actuator. ASME. Letters. in. Dynamic. Systems. and. Control. 2021, 1, 031011.
86. Wu, Q.; Zhu, F.; Wu, Z.; et al. Suspension printing of liquid metal in yield-stress fluid for resilient 3D constructs with electromagnetic functions. npj. Flex. Electron. 2022, 6, 184.
87. Zhang, Y.; Jiang, S.; Hu, Y.; et al. Reconfigurable magnetic liquid metal robot for high-performance droplet manipulation. Nano. Lett. 2022, 22, 2923-33.
88. Kim, H.; Lee, K.; Oh, J. W.; et al. Shape‐deformable and locomotive MXene (Ti3C2Tx)‐encapsulated magnetic liquid metal for 3D‐motion‐adaptive synapses. Adv. Funct. Mater. 2023, 33, 2210385.
89. Hu, L.; Wang, H.; Wang, X.; Liu, X.; Guo, J.; Liu, J. Magnetic liquid metals manipulated in the three-dimensional free space. ACS. Appl. Mater. Interfaces. 2019, 11, 8685-92.
90. Ren, L.; Sun, S.; Casillas-Garcia, G.; et al. A liquid-metal-based magnetoactive slurry for stimuli-responsive mechanically adaptive electrodes. Adv. Mater. 2018, 30, e1802595.
91. Kadau, H.; Schmitt, M.; Wenzel, M.; et al. Observing the rosensweig instability of a quantum ferrofluid. Nature 2016, 530, 194-7.
92. Torres-Díaz, I.; Rinaldi, C. Recent progress in ferrofluids research: novel applications of magnetically controllable and tunable fluids. Soft. Matter. 2014, 10, 8584-602.
93. Guo, R.; Sun, X.; Yuan, B.; Wang, H.; Liu, J. Magnetic liquid metal (Fe-EGaIn) based multifunctional electronics for remote self-healing materials, degradable electronics, and thermal transfer printing. Adv. Sci. 2019, 6, 1901478.
94. Zhang, J.; Soon, R. H.; Wei, Z.; Hu, W.; Sitti, M. Liquid metal-elastomer composites with dual-energy transmission mode for multifunctional miniature untethered magnetic robots. Adv. Sci. 2022, 9, e2203730.
95. Yu, Y.; Miyako, E. Alternating-magnetic-field-mediated wireless manipulations of a liquid metal for therapeutic bioengineering. iScience 2018, 3, 134-48.
96. Chen, B. C.; Ho, C. Y.; Kao, L. J.; Wu, W. C.; Tsai, Y. H.; Ma, C. Hysteresis loss-induced temperature in ferromagnetic nanoparticle. IEEE. Trans. Magn. 2014, 50, 1-4.
97. Tan, S.; Gui, H.; Yuan, B.; Liu, J. Magnetic trap effect to restrict motion of self-powered tiny liquid metal motors. Applied. Physics. Letters. 2015, 107, 071904.
98. Ni, X.; Luan, H.; Kim, J. T.; et al. Soft shape-programmable surfaces by fast electromagnetic actuation of liquid metal networks. Nat. Commun. 2022, 13, 5576.
99. Jin, S. W.; Park, J.; Hong, S. Y.; et al. Stretchable loudspeaker using liquid metal microchannel. Sci. Rep. 2015, 5, 11695.
100. Thess, A.; Votyakov, E. V.; Kolesnikov, Y. Lorentz force velocimetry. Phys. Rev. Lett. 2006, 96, 164501.
101. Yang, X.; Leanza, S.; Ze, Q.; Zhao, R. R. Electromagnetic-stimulated untethered amphibious soft robot with multimodal locomotion. Mater. Today. 2025, 87, 11-9.
102. Wang, D.; Gao, C.; Si, T.; Li, Z.; Guo, B.; He, Q. Near-infrared light propelled motion of needlelike liquid metal nanoswimmers. Colloids. Surf. A. Physicochem. Eng. Aspects. 2021, 611, 125865.
104. He, X.; Ni, M.; Wu, J.; Xuan, S.; Gong, X. Hard-magnetic liquid metal droplets with excellent magnetic field dependent mobility and elasticity. J. Mater. Sci. Technol. 2021, 92, 60-8.
105. Firouznia, S.; Romero, C.; Philamore, H.; Conn, A.; Garrad, M.; Rossiter, J. Shapeshifting liquid metal droplets for soft fluidic machines. Adv. Mater. 2025, Epub ahead of print.
106. Xu, Y.; Zhu, J.; Chen, H.; Yong, H.; Wu, Z. A soft reconfigurable circulator enabled by magnetic liquid metal droplet for multifunctional control of soft robots. Adv. Sci. 2023, 10, e2300935.
107. Li, P.; Feng, Y.; Ding, C.; et al. Magnetointeractive Cr2Te3-coated liquid metal droplets for flexible memory arrays and wearable sensors. Adv. Mater. 2025, 37, e2414519.
108. Wang, Q.; Pan, C.; Zhang, Y.; et al. Magnetoactive liquid-solid phase transitional matter. Matter 2023, 6, 855-72.
109. Cao, Y.; Fan, L.; Gao, J.; et al. Magnetic and injectable Fe-doped liquid metals for controlled movement and photothermal/electromagnetic therapy. J. Mater. Chem. B. 2024, 12, 2313-23.
110. Jiang, J.; Li, C.; Chen, C.; Shi, C.; Song, J. Tunable and reversible adhesive of liquid metal ferrofluid pillars for magnetically actuated noncontact transfer printing. Adv. Mater. 2024, 36, e2314004.
111. Guo, R.; Wang, X.; Chang, H.; et al. Ni‐GaIn amalgams enabled rapid and customizable fabrication of wearable and wireless healthcare electronics. Adv. Eng. Mater. 2018, 20, 1800054.
112. Wu, Y.; Deng, Z.; Peng, Z.; et al. A novel strategy for preparing stretchable and reliable biphasic liquid metal. Adv. Funct. Mater. 2019, 29, 1903840.
113. Li, S.; Dong, C.; Lv, Y. Magnetic liquid metal scaffold with dynamically tunable stiffness for bone tissue engineering. Biomater. Adv. 2022, 139, 212975.
114. Sun, X.; Wu, T.; Duan, M.; et al. Flexible skin patch enabled tumor hybrid thermophysical therapy and adaptive antitumor immune response. Adv. Healthc. Mater. 2023, 12, e2202872.
115. Hwang, H.; Lee, H.; Baek, J.; Kang, H.; Kim, Y. Engineering liquid metal particles: design rules for sonication-based methods. Nano. Lett. 2025, 25, 9881-90.
116. Wang, B.; Wang, Y.; Lin, J.; Zhang, Y.; Zhou, X. A swarm of liquid metal microdroplets for recyclable catalysis with high spatial-temporal precision. Appl. Mater. Today. 2023, 34, 101903.
117. Wu, X.; Peng, X.; Ren, L.; Guan, J.; Pumera, M. Reconfigurable magnetic liquid metal microrobots: a regenerable solution for the capture and removal of micro/nanoplastics. Adv. Funct. Mater. 2024, 34, 2410167.
118. Liu, Z.; Li, W.; Tan, X.; et al. Transformable magnetic liquid-metal nanoplatform for intracellular drug delivery and MR imaging-guided microwave thermochemotherapy. ACS. Appl. Mater. Interfaces. 2024, 16, 9826-38.
119. Wang, D.; Wu, Q.; Guo, R.; Lu, C.; Niu, M.; Rao, W. Magnetic liquid metal loaded nano-in-micro spheres as fully flexible theranostic agents for SMART embolization. Nanoscale 2021, 13, 8817-36.
120. Liu, Z.; Tan, X.; Huang, Y.; et al. Microwave absorption-based magnetic liquid metal nano-missiles for thermodynamic/immunological cascade hepatoma therapy. Chem. Eng. J. 2023, 471, 144688.
121. Wu, X.; Zhang, L.; Tong, Y.; et al. Self-adaptive magnetic liquid metal microrobots capable of crossing biological barriers and wireless neuromodulation. ACS. Nano. 2024, 18, 29558-71.
122. Zhang, M.; Chen, X.; Sun, Y.; et al. A magnetically and thermally controlled liquid metal variable stiffness material. Adv. Eng. Mater. 2023, 25, 2201296.
123. Mao, G.; Schiller, D.; Danninger, D.; et al. Ultrafast small-scale soft electromagnetic robots. Nat. Commun. 2022, 13, 4456.
124. Li, W.; Chen, H.; Yi, Z.; et al. Self-vectoring electromagnetic soft robots with high operational dimensionality. Nat. Commun. 2023, 14, 182.
125. Li, N.; Zhou, Y.; Li, Y.; et al. Transformable 3D curved high-density liquid metal coils - an integrated unit for general soft actuation, sensing and communication. Nat. Commun. 2024, 15, 7679.
126. Zhou, X.; Shu, J.; Jin, H.; et al. Variable stiffness wires based on magnetorheological liquid metals. Int. J. Smart. Nano. Mater. 2022, 13, 232-43.
127. Chen, Y.; Wu, H.; Li, R.; et al. High-performance liquid metal electromagnetic actuator fabricated by femtosecond laser. Int. J. Extrem. Manuf. 2024, 6, 025503.
128. Shin, G.; Choi, Y.; Jeon, B.; Choi, I.; Song, S.; Park, Y. Soft electromagnetic artificial muscles using high‐density liquid‐metal solenoid coils and bistable stretchable magnetic housings. Adv. Funct. Mater. 2024, 34, 2302895.
129. Shen, Y.; Cao, J.; Zhou, E.; et al. Tough hydrogel-coated containment capsule of magnetic liquid metal for remote gastrointestinal operation. Natl. Sci. Rev. 2025, 12, nwaf042.
130. Kim, E.; Jeong, E.; Hong, Y. M.; et al. Magnetically reshapable 3D multi-electrode arrays of liquid metals for electrophysiological analysis of brain organoids. Nat. Commun. 2025, 16, 2011.
131. Zhao, B.; Bai, Z.; Lv, H.; et al. Self-healing liquid metal magnetic hydrogels for smart feedback sensors and high-performance electromagnetic shielding. Nanomicro. Lett. 2023, 15, 79.
132. Zhu, G.; Tian, Y.; Tan, J.; et al. Fabrication of core-shell liquid metal@silica nanoparticles for enhanced mechanical, dielectric and thermal properties of silicone rubber. CrystEngComm 2023, 25, 3299-307.
133. Hallfors, N.; Khan, A.; Dickey, M. D.; Taylor, A. M. Integration of pre-aligned liquid metal electrodes for neural stimulation within a user-friendly microfluidic platform. Lab. Chip. 2013, 13, 522-6.
134. Wang, X.; Fan, L.; Zhang, J.; et al. Printed conformable liquid metal e‐skin‐enabled spatiotemporally controlled bioelectromagnetics for wireless multisite tumor therapy. Adv. Funct. Mater. 2019, 29, 1907063.
135. Tian, H.; Liu, J.; Zhang, W.; et al. Recent advances for core-shell gallium-based liquid metal particles: properties, fabrication, modification, and applications. Nanoscale 2025, 17, 11934-59.
136. Xu, H.; Lu, J.; Xi, Y.; Wang, X.; Liu, J. Liquid metal biomaterials: translational medicines, challenges and perspectives. Natl. Sci. Rev. 2024, 11, nwad302.
137. Liu, Y.; Zhang, W.; Wang, H. Synthesis and application of core-shell liquid metal particles: a perspective of surface engineering. Mater. Horiz. 2021, 8, 56-77.
Cite This Article
How to Cite
Download Citation
Export Citation File:
Type of Import
Tips on Downloading Citation
Citation Manager File Format
Type of Import
Direct Import: When the Direct Import option is selected (the default state), a dialogue box will give you the option to Save or Open the downloaded citation data. Choosing Open will either launch your citation manager or give you a choice of applications with which to use the metadata. The Save option saves the file locally for later use.
Indirect Import: When the Indirect Import option is selected, the metadata is displayed and may be copied and pasted as needed.
About This Article
Special Topic
Copyright

Data & Comments
Data
0













Comments
Comments must be written in English. Spam, offensive content, impersonation, and private information will not be permitted. If any comment is reported and identified as inappropriate content by OAE staff, the comment will be removed without notice. If you have any queries or need any help, please contact us at [email protected].