



fig9
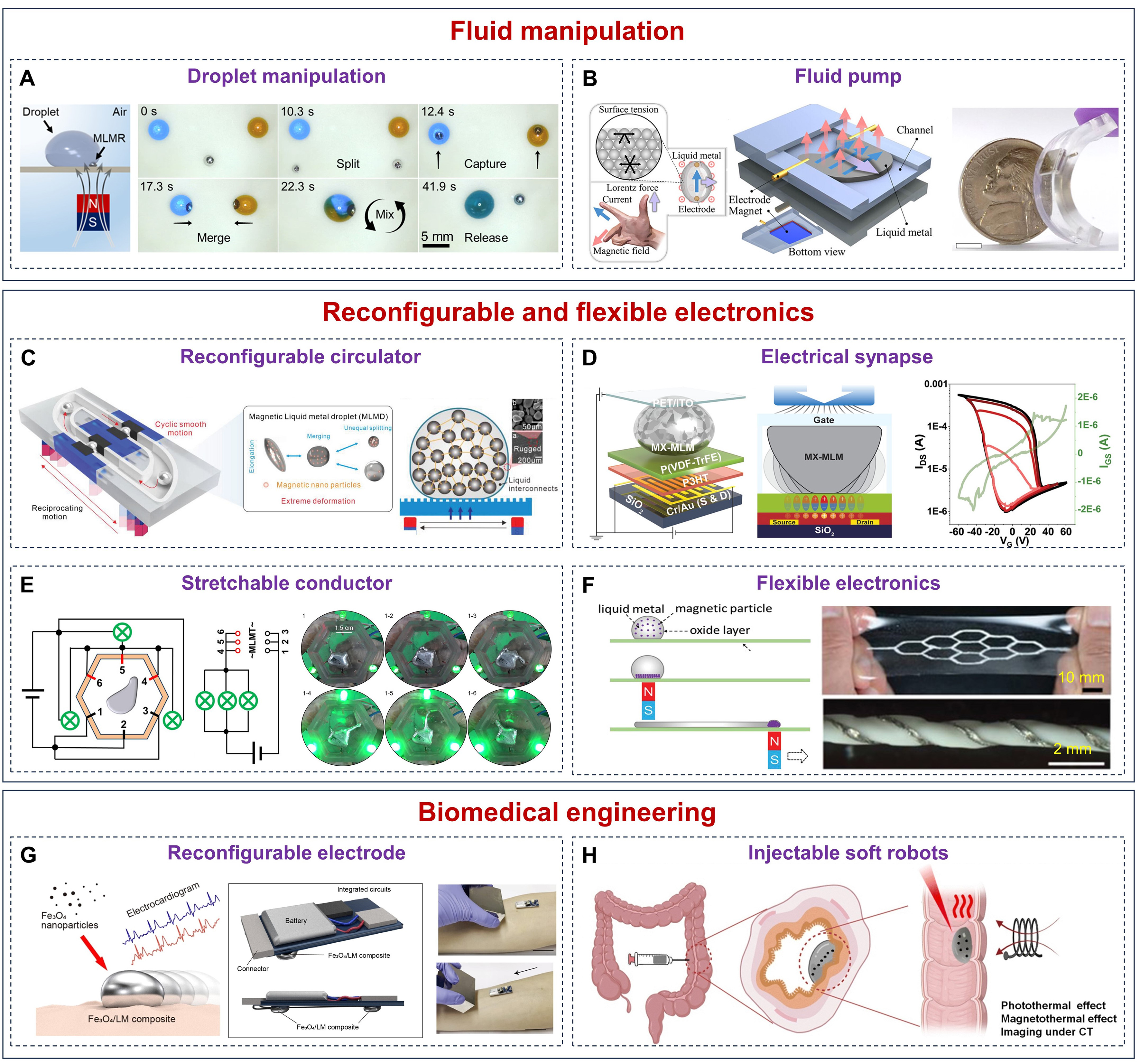
Figure 9. MLM droplet-based soft robots. (A) Droplet manipulation using the MLM droplet[87]. Reprinted with permission. Copyright 2022, American Chemical Society; (B) Electrohydrodynamic instability-based LM pump[105]. Reprinted with permission. Copyright 2025, John Wiley and Sons; Schematic showing the device structure and mechanism of the MLM droplet-based (C) reconfigurable circulator[106] and (D) electric synapse[88]. Reprinted with permission[106]. Copyright 2023, John Wiley and Sons; Reprinted with permission[88]. Copyright 2023, John Wiley and Sons; (E) MLM droplet-based stretchable conductor for a reconfigurable circuit[89]. Reprinted with permission. Copyright 2019, American Chemical Society; (F) MLM droplet-enabled patterning of LM[46]. Reprinted with permission. Copyright 2019, John Wiley and Sons; (G) MLM droplet as a reconfigurable electrode for monitoring of the ECG signal[60]. Reprinted with permission. Copyright 2023, American Chemical Society; (H) Injectable MLM for thermal therapy and imaging[109]. Reprinted with permission. Copyright 2024, Royal Society of Chemistry. MLM: Magnetic liquid metal; LM: liquid metal; ECG: electrocardiogram; MLMR: magnetic liquid metal robot; CT: computed tomography.





