



fig1
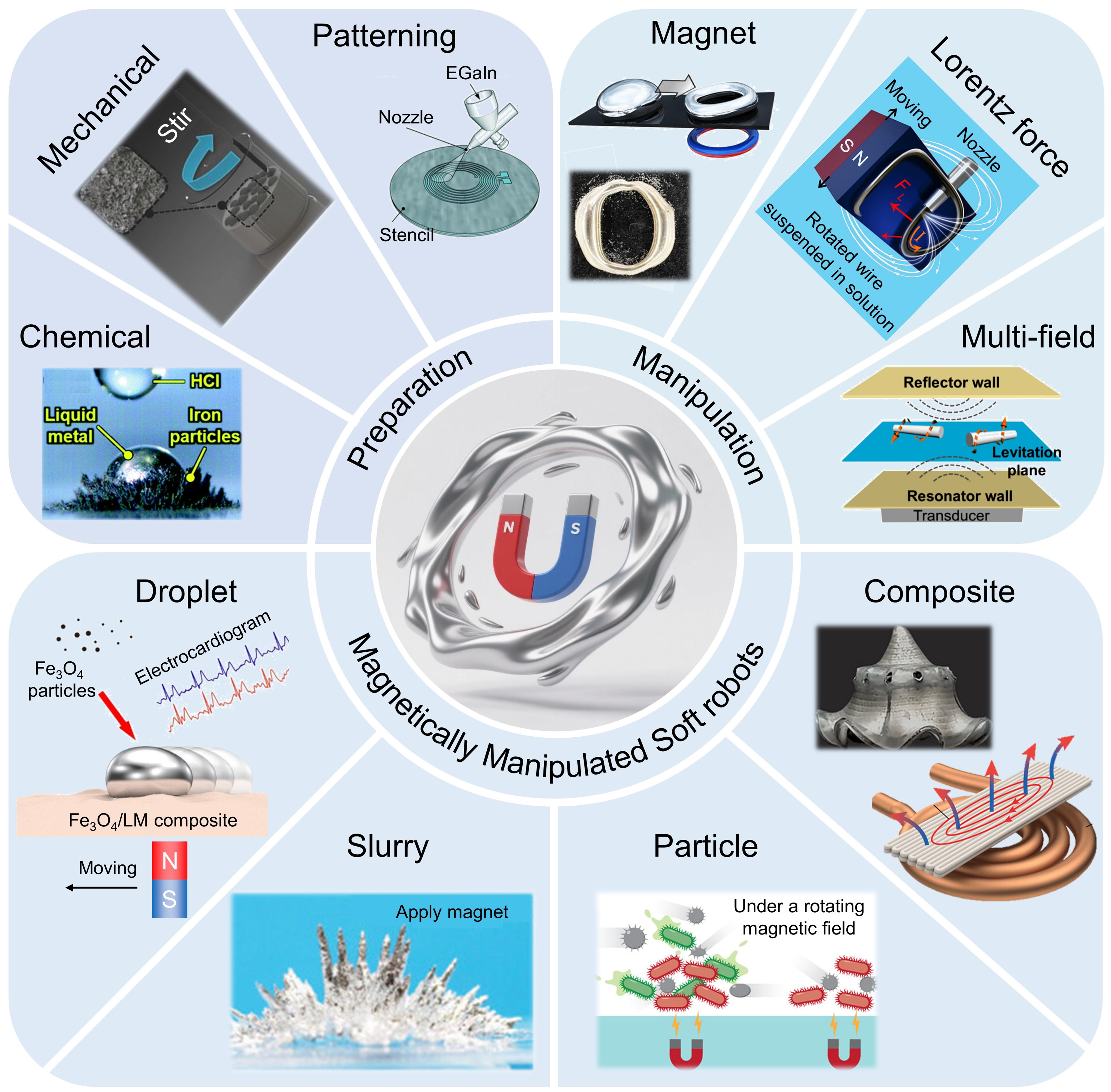
Figure 1. Schematic illustrations of preparation methods, magnetic manipulation, and soft robotic applications across four categorized types of liquid metals (i.e., droplet, slurry, particle, and composite). Preparation methods including chemical[51], mechanical[52], and patterning[53]. Reprinted with permission[51]. Copyright 2019, Royal Society of Chemistry; Reprinted with permission[52]. Copyright 2018, John Wiley and Sons; Reprinted with permission[53]. Copyright 2017, Royal Society of Chemistry. Manipulation mechanisms including magnet[54], Lorentz force[55] and multi-field[56]. Reprinted with permission[54]. Copyright 2023, Springer Nature; Reprinted with permission[55]. Copyright 2022, National Academy of Sciences; Reprinted with permission[56]. Copyright 2018, American Chemical Society. Soft robots including composite[57], particle[58], slurry[59] and droplet[60] type. Reprinted with permission[57]. Copyright 2024, John Wiley and Sons. Reprinted with permission[58]. Copyright 2020, American Chemical Society; Reprinted with permission[59]. Copyright 2021, John Wiley and Sons; Reprinted with permission[60]. Copyright 2023, American Chemical Society. The elements shown in this figure are representative examples intended to aid understanding and are not meant to be exhaustive.





