



fig13
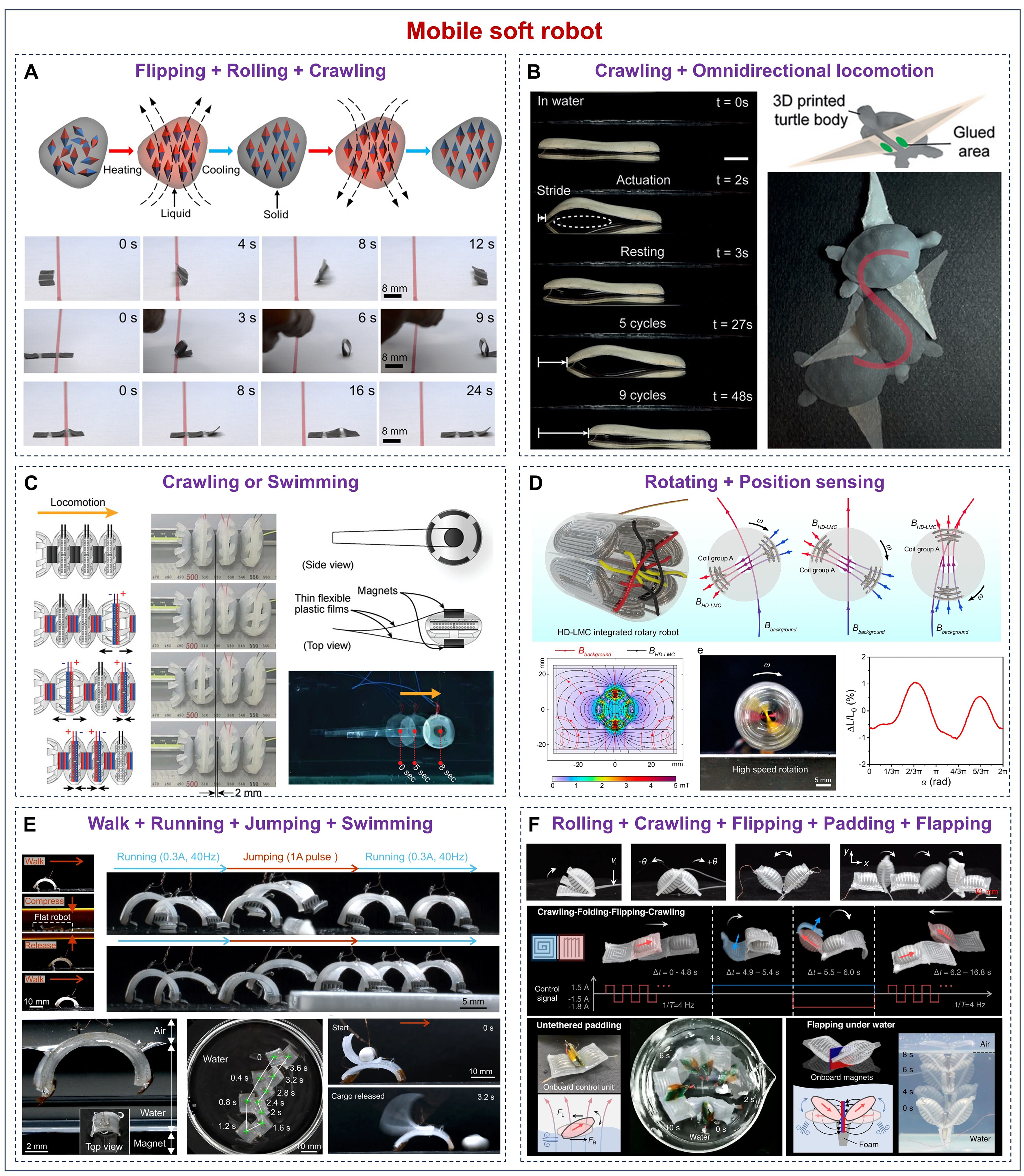
Figure 13. LM composite-based mobile soft robots. (A) Magnetic reprogrammable soft robots with three distinct locomotion modes[79]. Reprinted with permission. Copyright 2023, John Wiley and Sons; (B) LCE-LM-based soft robots. Reprinted with permission[57]. Copyright 2024, John Wiley and Sons; (C) Bistable electromagnetic actuator-based crawling and swimming soft robots[128]. Reprinted with permission. Copyright 2023, John Wiley and Sons; (D) Rotary robot composed of 3D LM coils encapsulated in PDMS with position sensing ability[125]. Reprinted with permission. Copyright 2024, Springer Nature; (E) A single electromagnetic robot with multimodal locomotion, including walking, running, swimming, and jumping[123]. Reprinted with permission. Copyright 2022, Springer Nature; (F) Self-vectoring electromagnetic soft robots with high operational dimensionality[124]. Reprinted with permission. Copyright 2023, Springer Nature. LM: Liquid metal; LCE: liquid crystal elastomer; PDMS: polydimethylsiloxane.





