



fig10
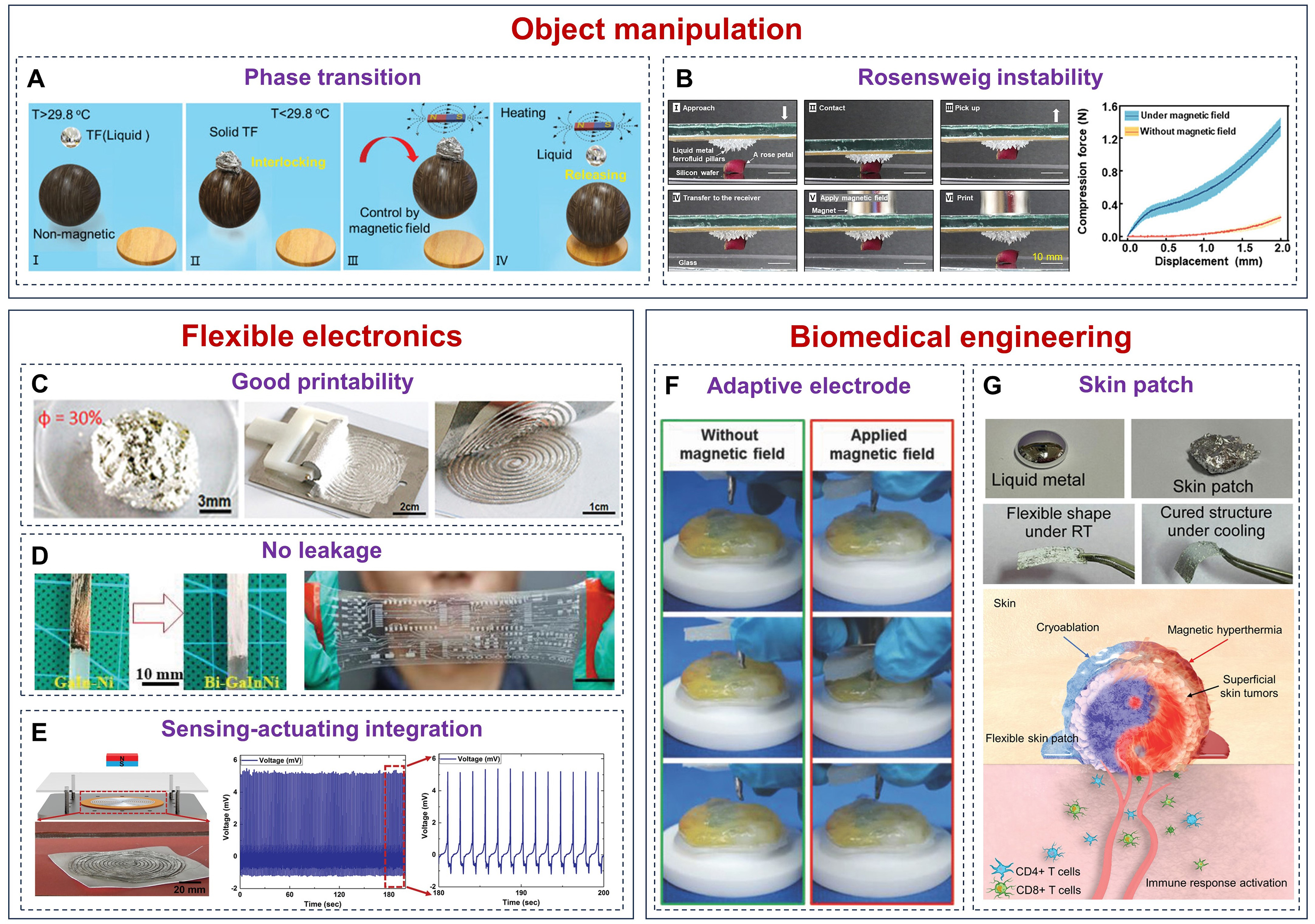
Figure 10. MLM slurry-based soft robots. MLM slurry-based soft gripper utilizing (A) phase transition[59] and (B) Rosensweig instability[110]. Reprinted with permission[59]. Copyright 2021, John Wiley and Sons; Reprinted with permission[110]. Copyright 2024, John Wiley and Sons; Printable MLM slurry with the properties including (C) good printability[111], (D) no leakage[112], and (E) sensing-actuating integration[61]. Reprinted with permission[111]. Copyright 2018, John Wiley and Sons; Reprinted with permission[112]. Copyright 2019, John Wiley and Sons; Reprinted with permission[61]. Copyright 2020, John Wiley and Sons; (F) MLM slurry-based stiffness-tunable bioelectrode[90]. Reprinted with permission. Copyright 2018, John Wiley and Sons; (G) Flexible MLM patch for hybrid thermophysical therapy[114]. Reprinted with permission. Copyright 2023, John Wiley and Sons. MLM: Magnetic liquid metal; TF: transitional ferrofluid; RT: room temperature.





