



fig5
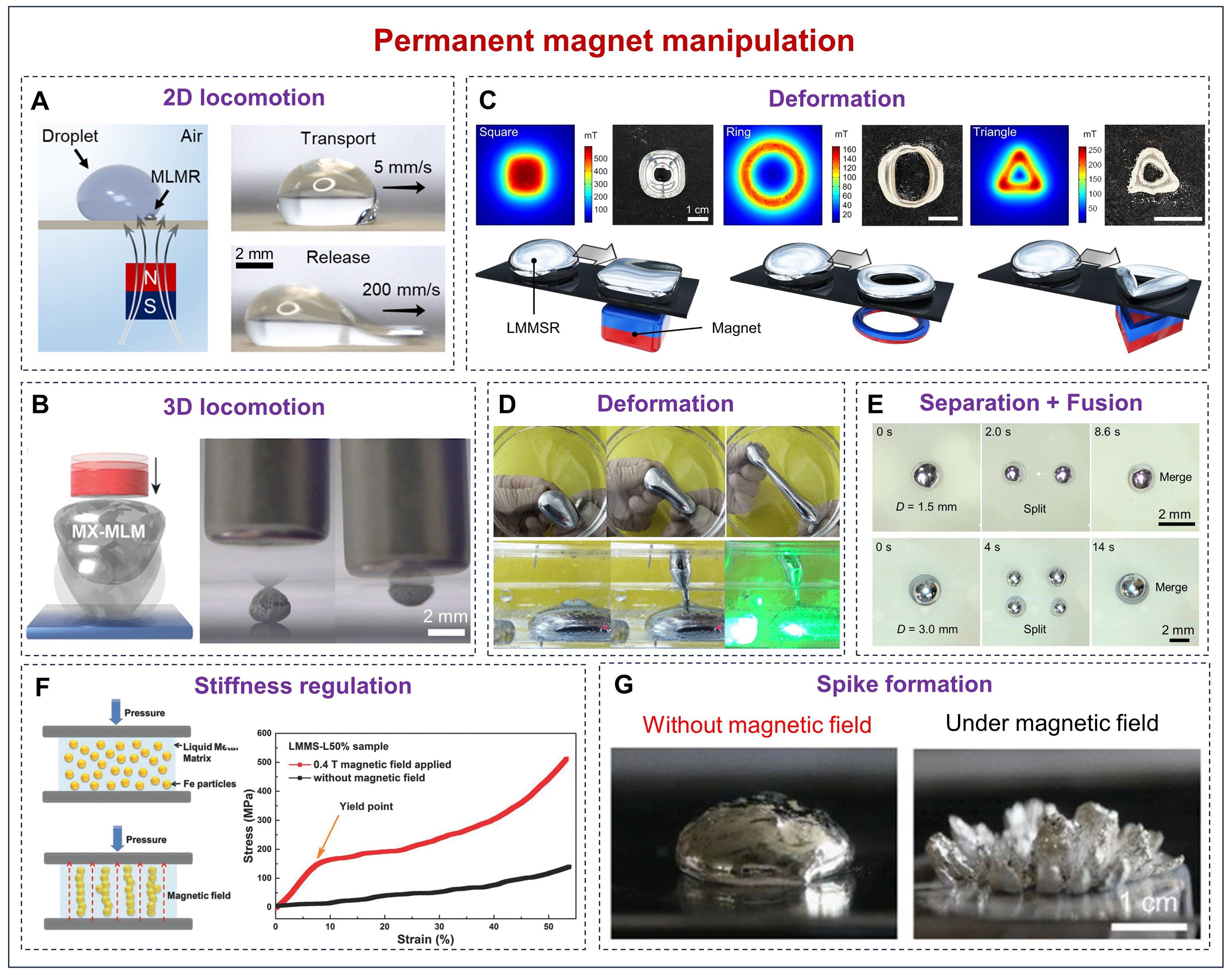
Figure 5. Permanent magnet manipulation. (A) 2D[87] and (B) 3D locomotion[88] and (C) deformation[54] of the MLM droplet manipulated by a single permanent magnet. Reprinted with permission[87]. Copyright 2022, American Chemical Society; Reprinted with permission[88]. Copyright 2023, John Wiley and Sons; Reprinted with permission[54]. Copyright 2023, Springer Nature; (D) Deformation[89], (E) separation, and fusion[87] of the MLM droplet manipulated by multiple magnets. Reprinted with permission[89]. Copyright 2019, American Chemical Society; Reprinted with permission[87]. Copyright 2022, American Chemical Society; (F) Particle alignment-induced modulus variation[90]. Reprinted with permission. Copyright 2018, John Wiley and Sons; (G) Rosensweig instability-induced spike formation[93]. Reprinted with permission. Copyright 2019, John Wiley and Sons. MLM: Magnetic liquid metal; LMMS: liquid-metal-based magnetoactive slurry; MLMR: magnetic liquid metal robot; MLMR: magnetically actuated liquid metal robot; LMMSR: liquid metal magnetic soft robot.





