


fig6
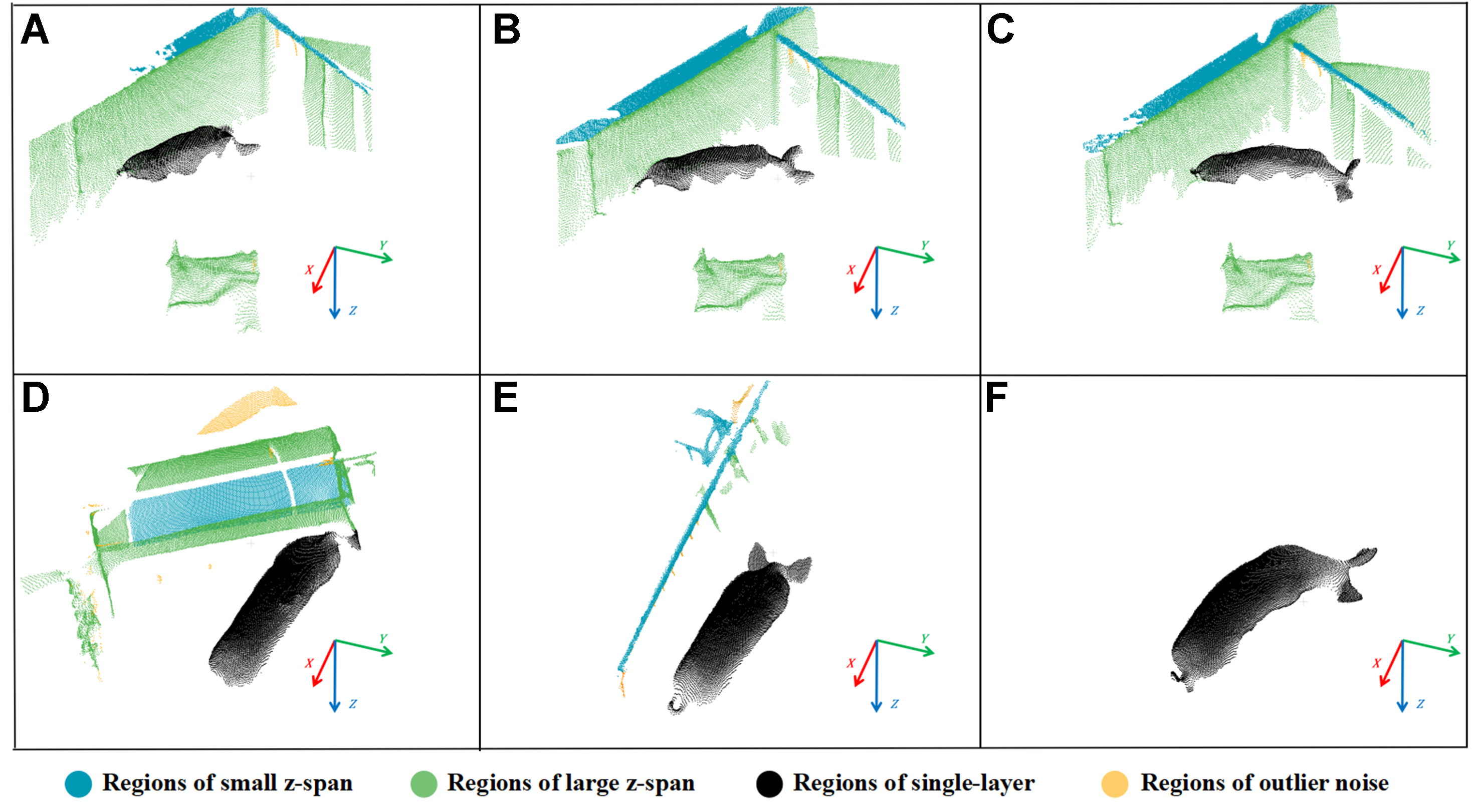
Figure 6. (A-F) Represent typical point clouds of different noise complexity, the 4 colored point regions in the figure have 4 different point distribution characteristics.
Figure 6. (A-F) Represent typical point clouds of different noise complexity, the 4 colored point regions in the figure have 4 different point distribution characteristics.


All published articles are preserved here permanently:
https://www.portico.org/publishers/oae/


