


fig5
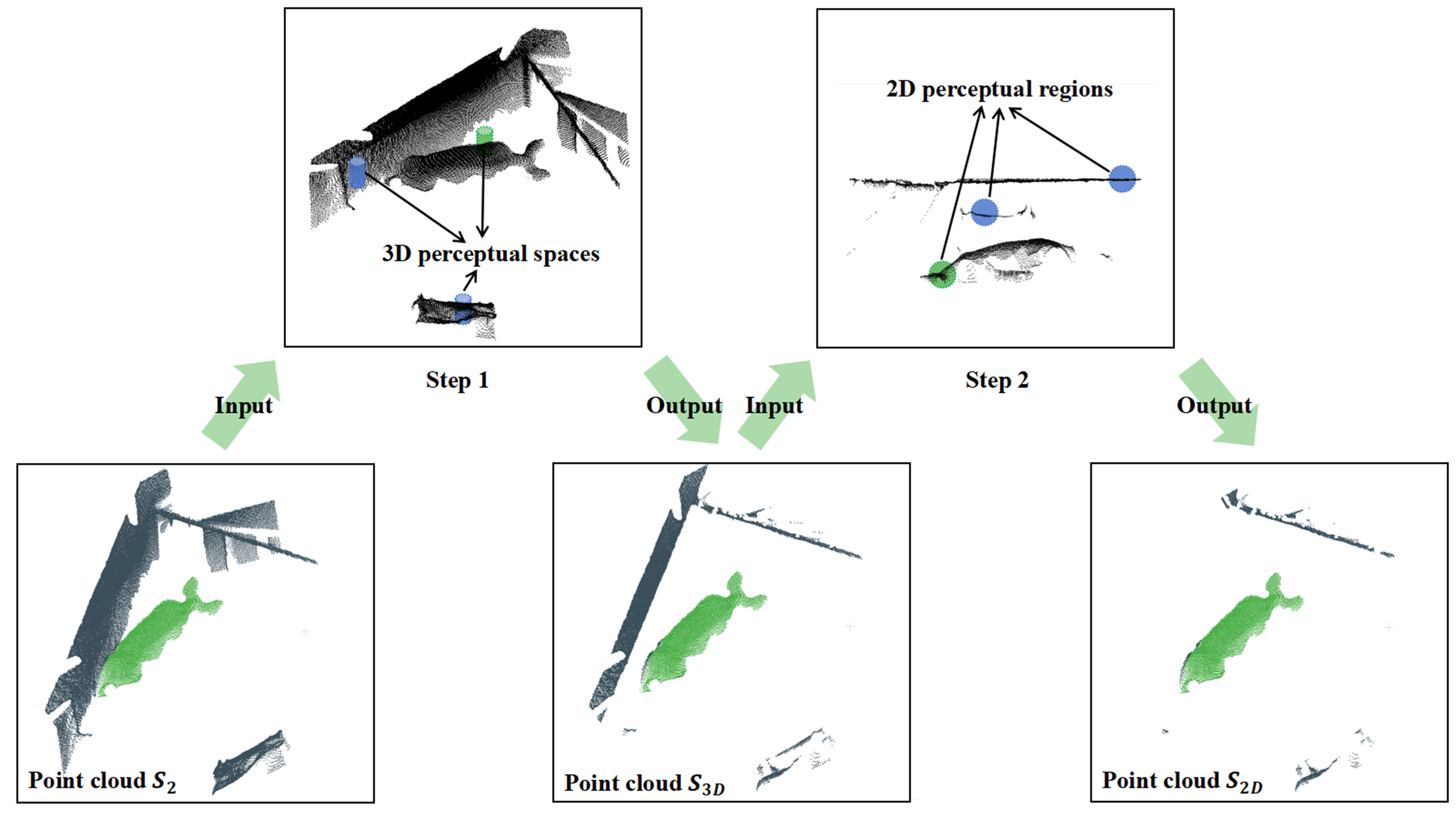
Figure 5. Flowchart of walls, railings (etc.) removal by 3D, 2D perceptual spatial filtering (module 2). S2: point cloud within region of interest obtained in the previous section, S3D: point cloud after 3D perceptual spatial filtering, S2D: point cloud after 2D perceptual spatial filtering.





