


Figure3
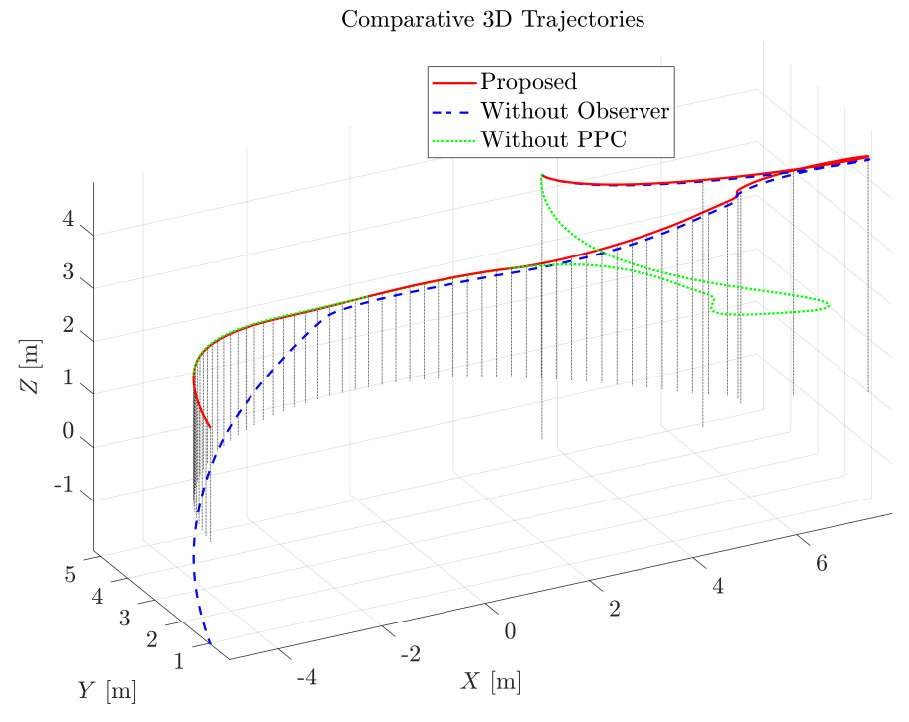
Figure 3. Comparative 3D trajectories. The Proposed method (red) tracks the reference smoothly, while the Without Observer case (blue) suffers from altitude deviation. PPC: Prescribed performance control.
Figure 3. Comparative 3D trajectories. The Proposed method (red) tracks the reference smoothly, while the Without Observer case (blue) suffers from altitude deviation. PPC: Prescribed performance control.


All published articles are preserved here permanently:
https://www.portico.org/publishers/oae/


