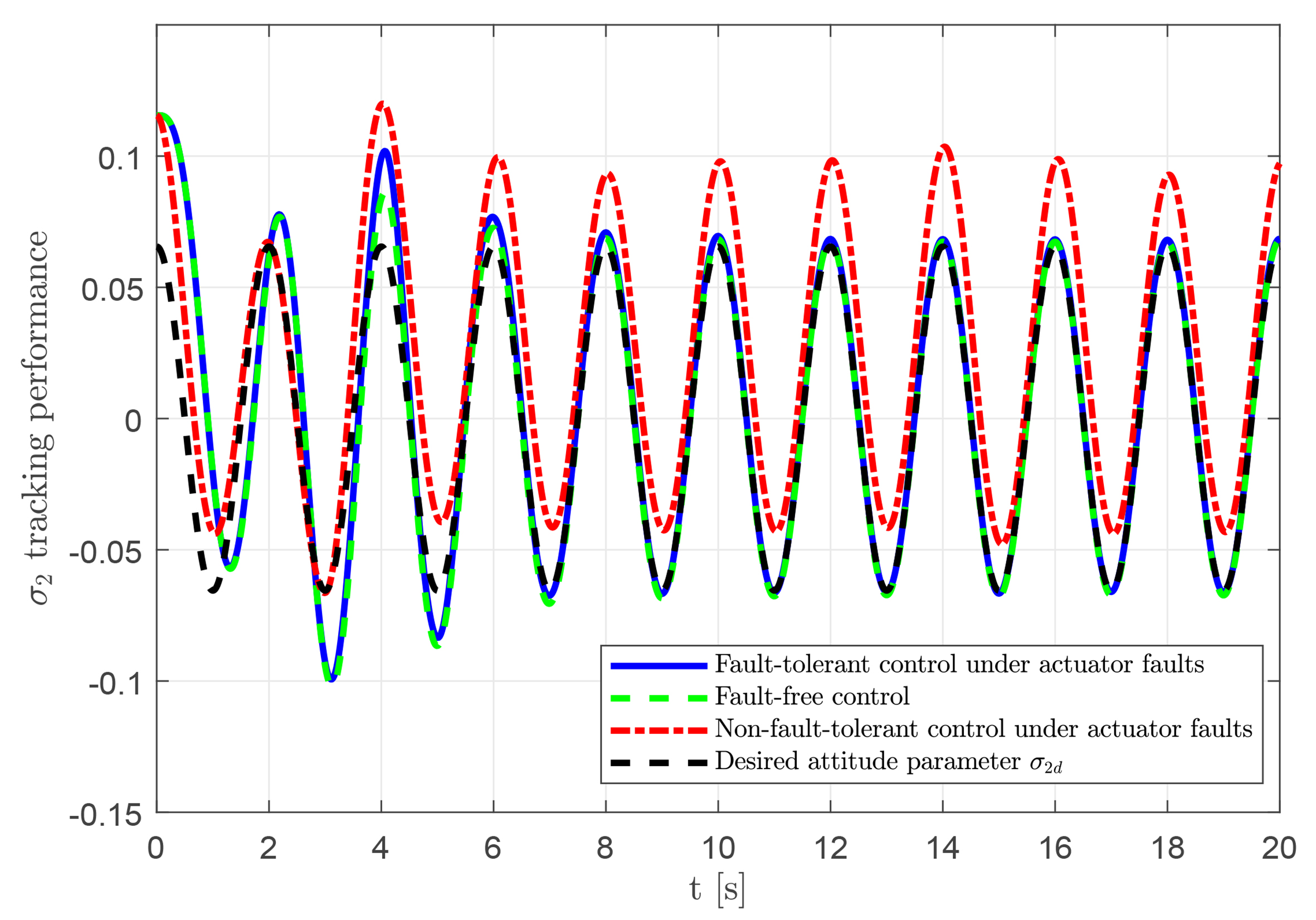
Figure 9. Tracking performance of $$ \sigma_2 $$ under different fault conditions.
All published articles are preserved here permanently: