


Figure6
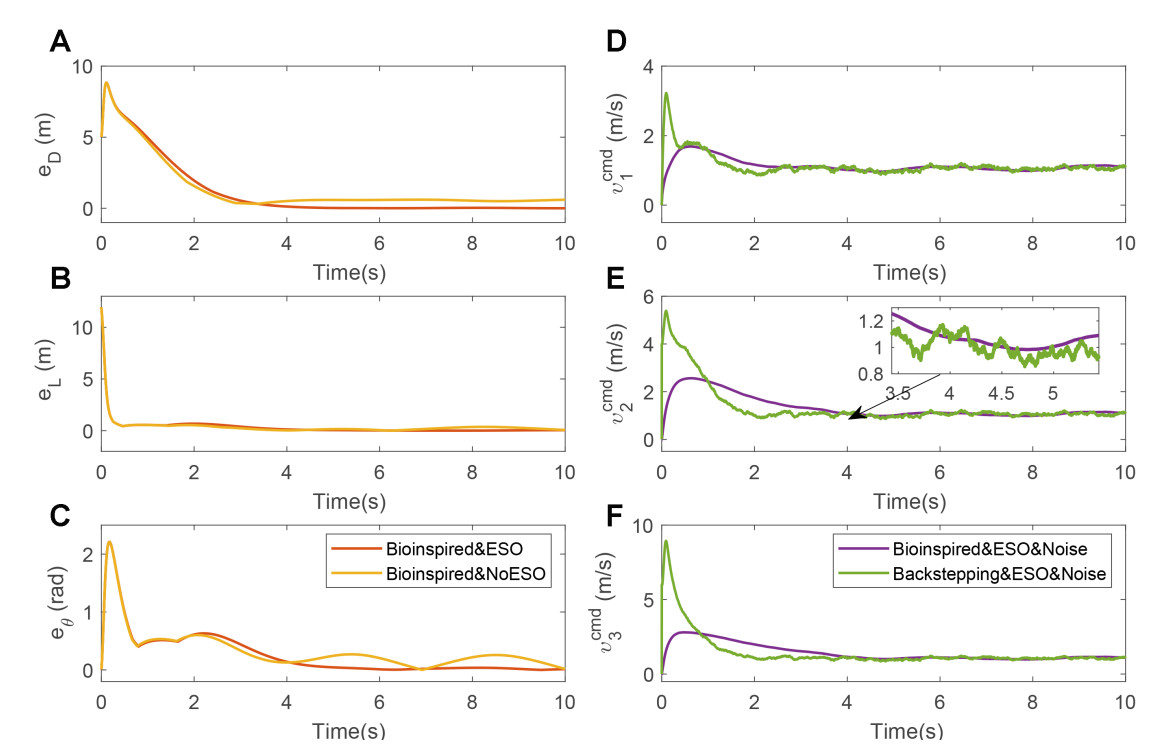
Figure 6. Tracking error with and without nonlinear state estimator (A) Tracking error in the driving direction; (B) Tracking error in the lateral direction; (C) Tracking error in the orientation; (D) Velocity command of Follower 1; (E) Velocity command of Follower 2; (F) Velocity command of Follower 3. ESO: Extended State Observer.





