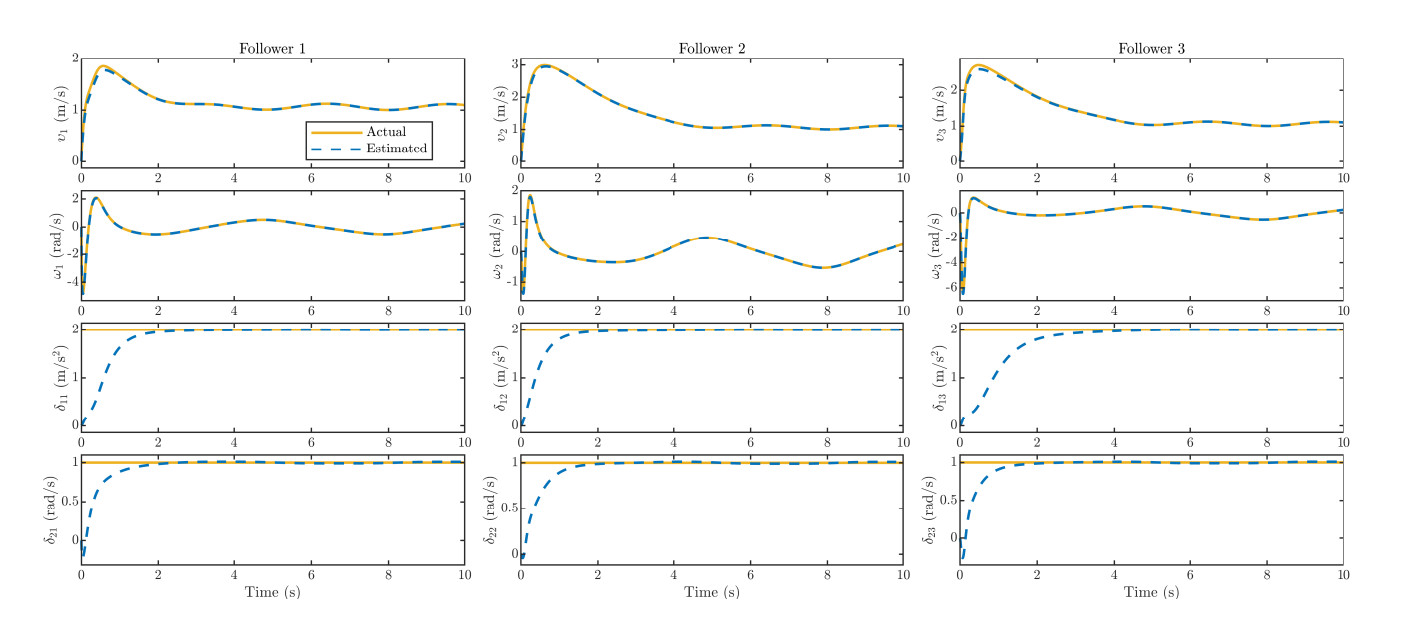
Figure 5. Velocity and disturbance estimates of each follower.
All published articles are preserved here permanently: