


Figure4
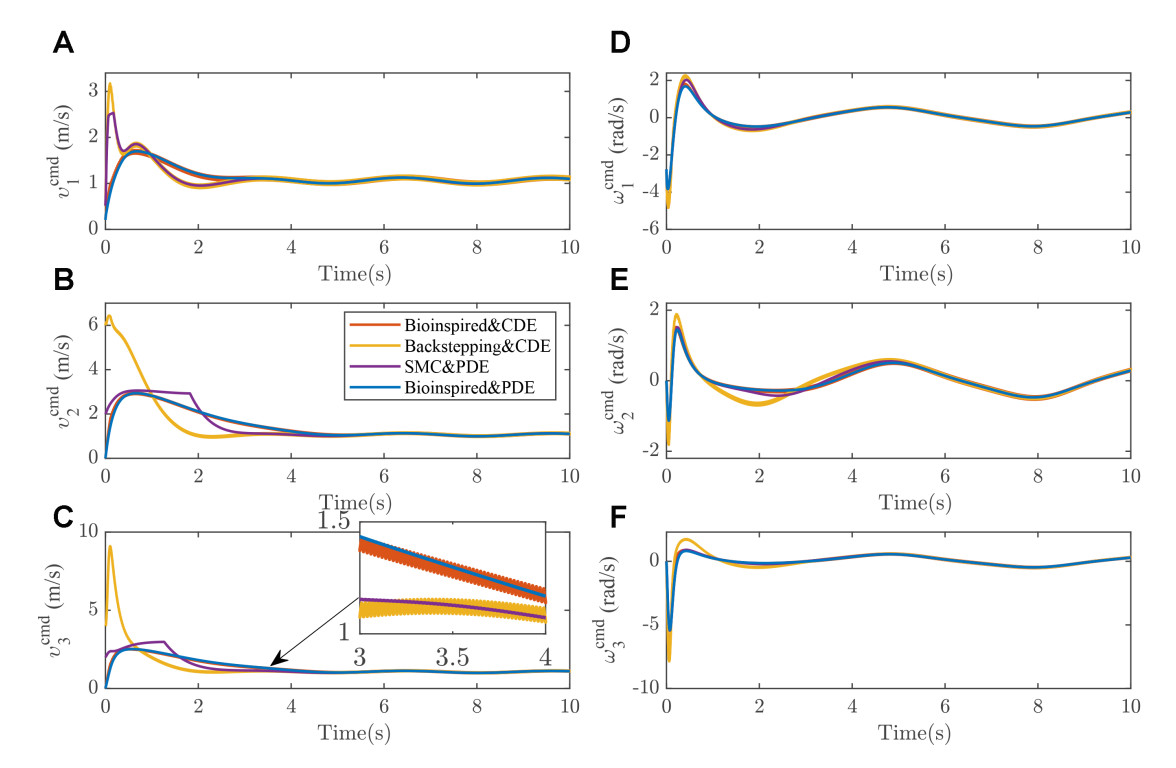
Figure 4. Velocity command generated from the velocity controller. (A-C) Linear velocity command; (D-F): Angular velocity command. CDE: Conventional distributed estimator; SMC: sliding mode control; PDE: proposed distributed estimator.
Figure 4. Velocity command generated from the velocity controller. (A-C) Linear velocity command; (D-F): Angular velocity command. CDE: Conventional distributed estimator; SMC: sliding mode control; PDE: proposed distributed estimator.


All published articles are preserved here permanently:
https://www.portico.org/publishers/oae/


