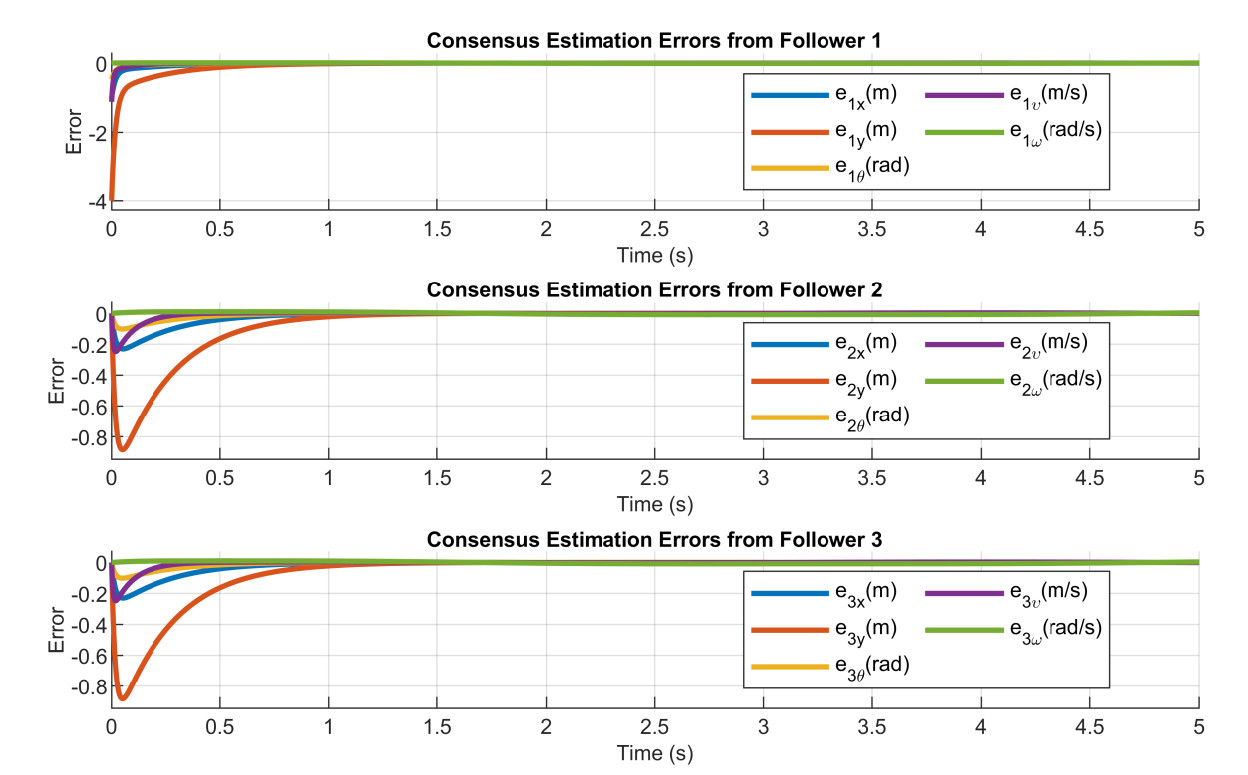
Figure 3. Consensus estimation error from the distributed estimator.
All published articles are preserved here permanently: