


fig2
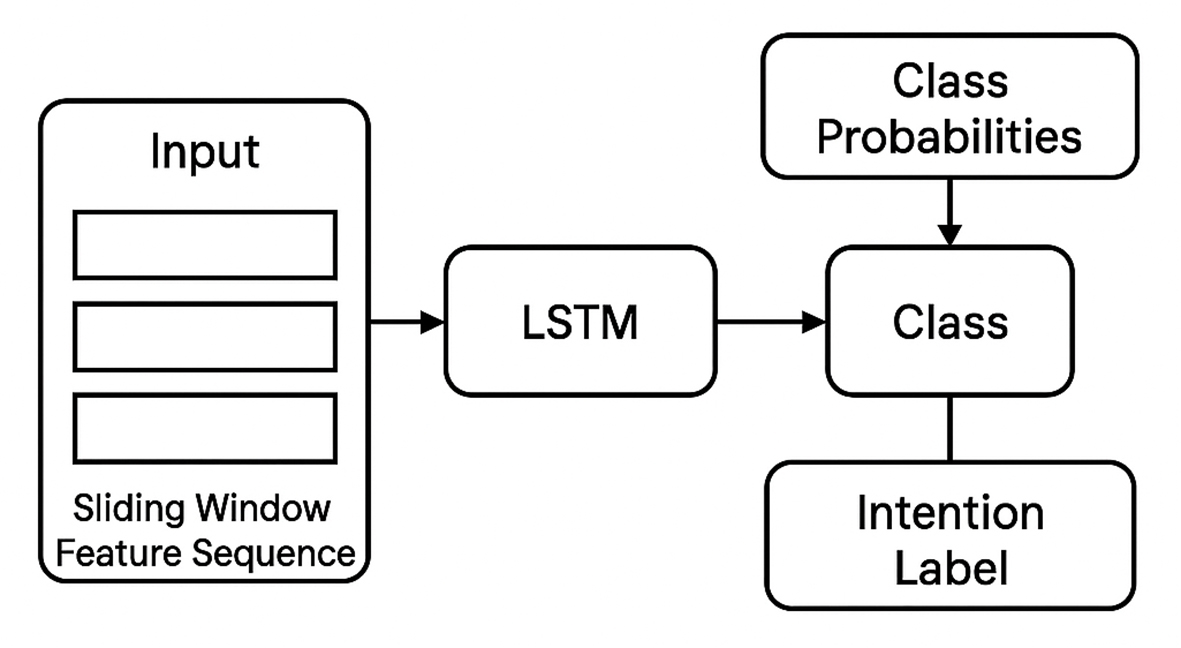
Figure 2. LSTM-based intention classification. LSTM: Long short-term memory.
Figure 2. LSTM-based intention classification. LSTM: Long short-term memory.


All published articles are preserved here permanently:
https://www.portico.org/publishers/oae/


