


fig11
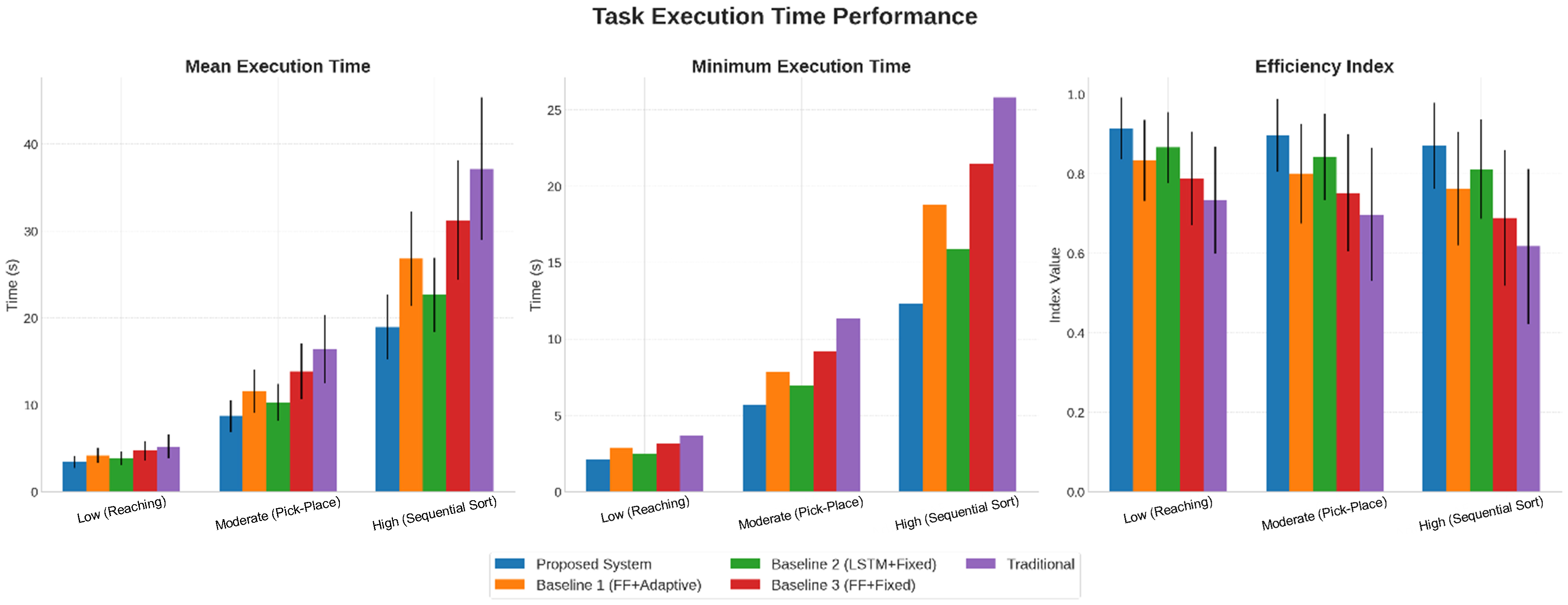
Figure 11. Task execution time performance. The error bars in the bar chart represent the achieved result points and indicate the standard deviation. LSTM: Long short-term memory; FF: feed-forward.
Figure 11. Task execution time performance. The error bars in the bar chart represent the achieved result points and indicate the standard deviation. LSTM: Long short-term memory; FF: feed-forward.


All published articles are preserved here permanently:
https://www.portico.org/publishers/oae/


