


fig1
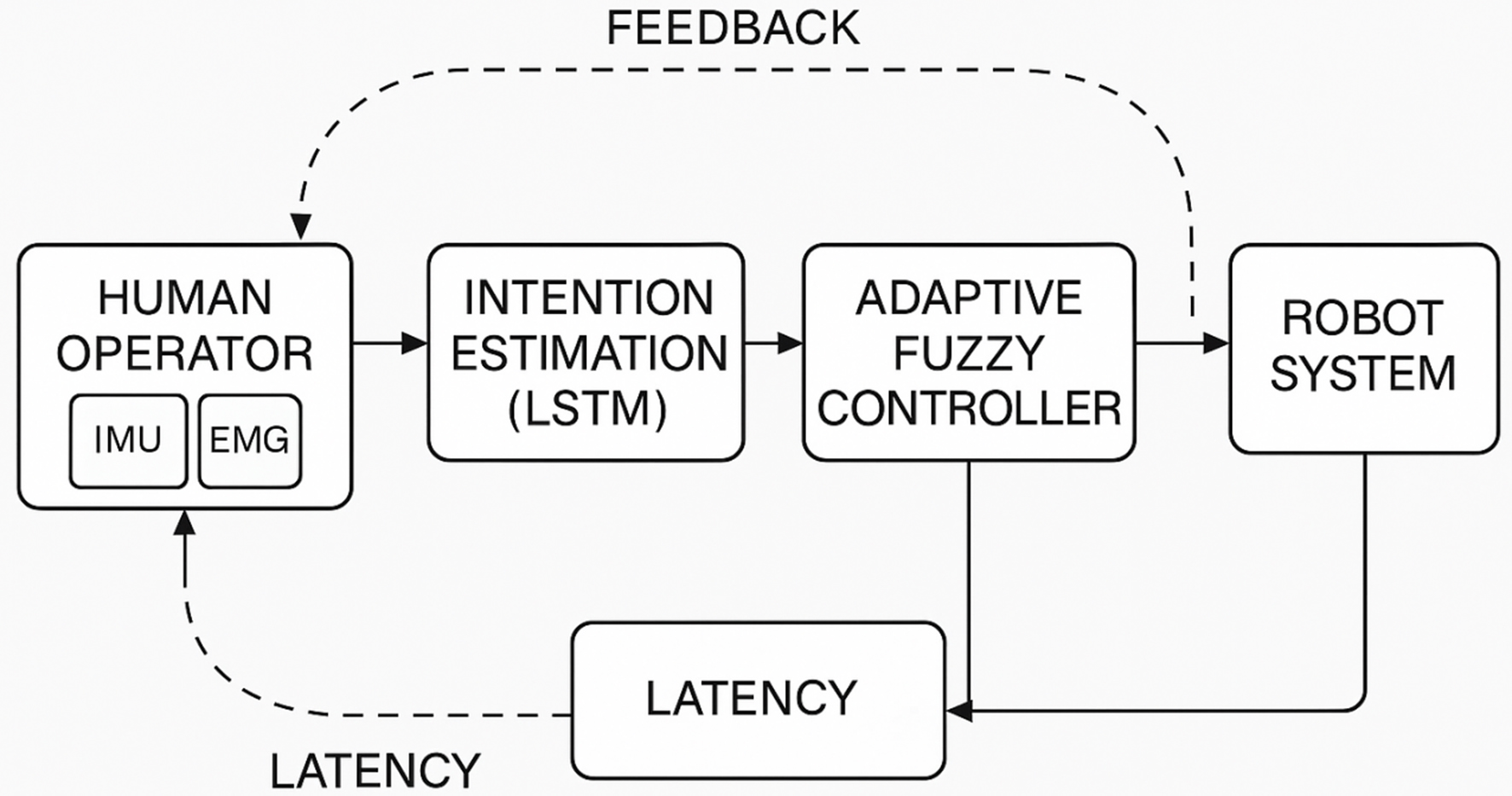
Figure 1. Proposed TOM. TOM: Tele-operation model; IMU: inertial measurement unit; EMG: electromyography; LSTM: long short-term memory.
Figure 1. Proposed TOM. TOM: Tele-operation model; IMU: inertial measurement unit; EMG: electromyography; LSTM: long short-term memory.


All published articles are preserved here permanently:
https://www.portico.org/publishers/oae/


