


fig7
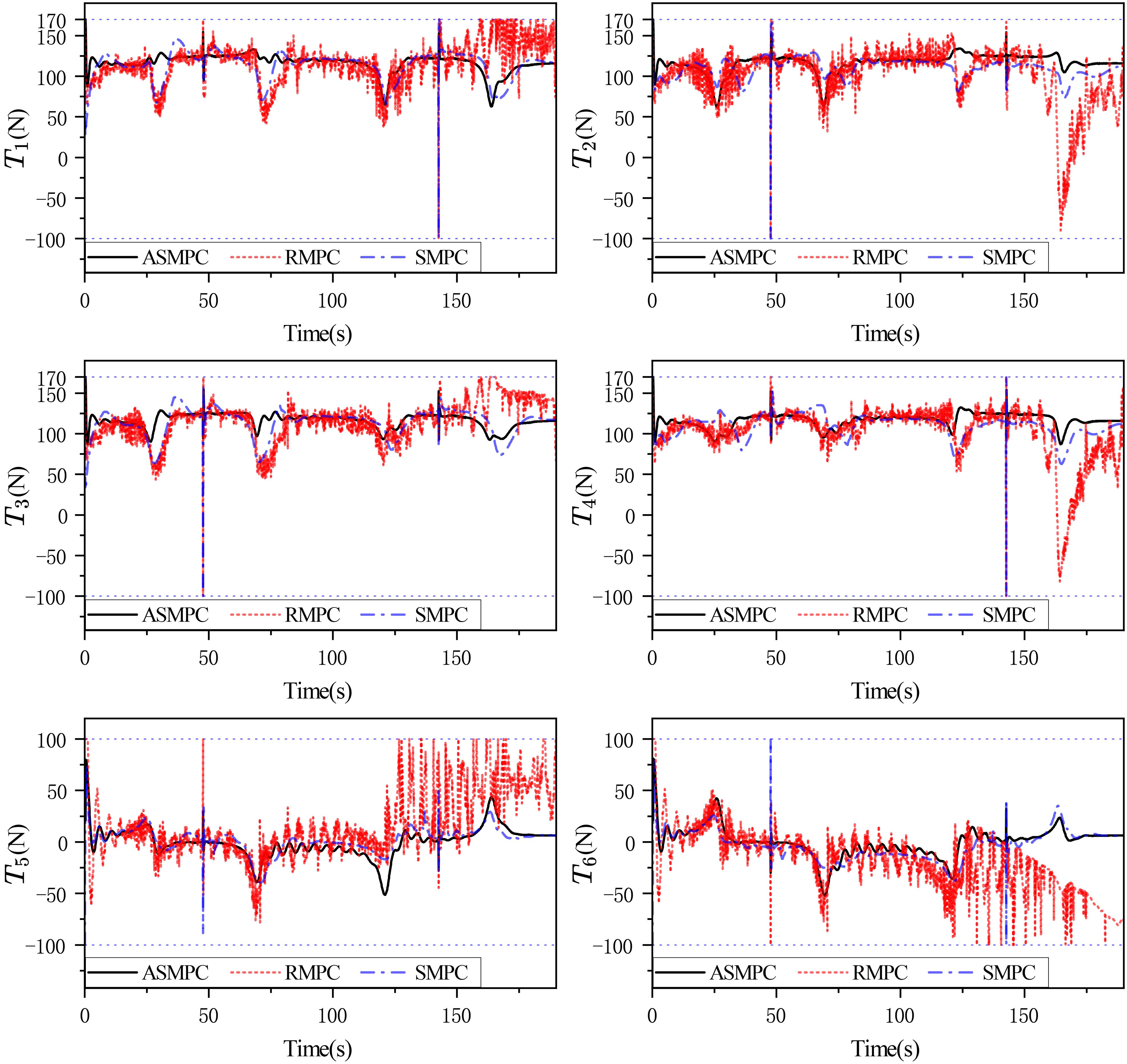
Figure 7. The force generated by each thruster without current disturbance. The set thrust limits have been marked by dashed lines.
Figure 7. The force generated by each thruster without current disturbance. The set thrust limits have been marked by dashed lines.


All published articles are preserved here permanently:
https://www.portico.org/publishers/oae/


