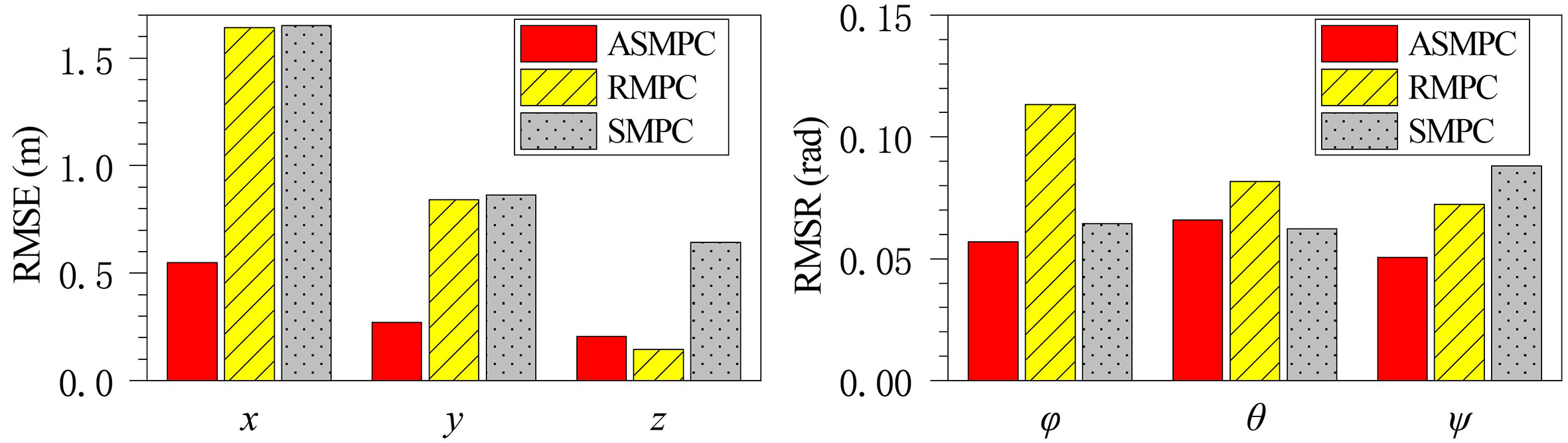
Figure 11. The RMSE in each axis. RMSE: Root mean square errors.
All published articles are preserved here permanently: