


fig2
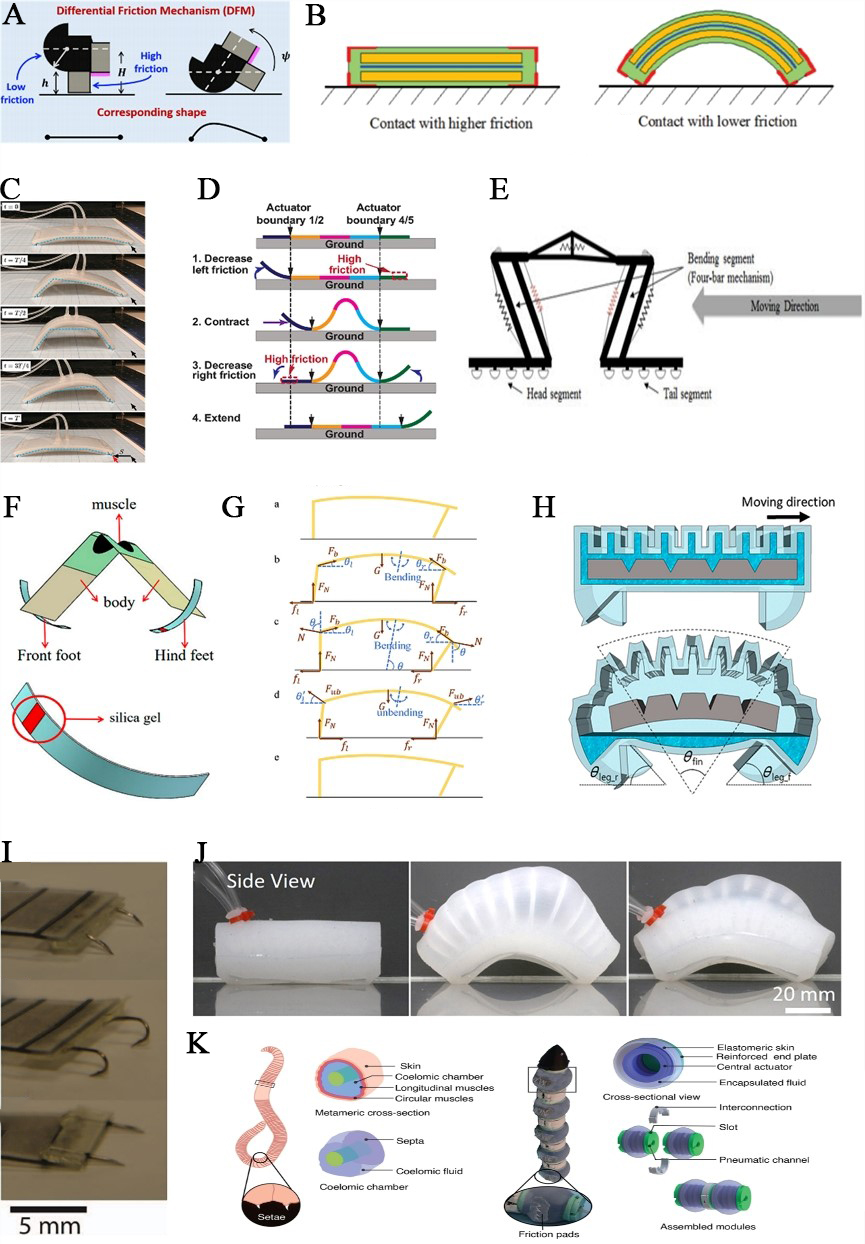
Figure 2. Friction-like attachment modes. Figure 2A-K present representative demonstrations of the friction-based attachment mechanisms discussed above: (A) differential friction mechanism (DFM) combining low- and high-friction materials.Adapted with permission[5], Copyright 2021, IEEE; (B) Smooth transparent tape. Adapted with permission[6], Copyright 2018, IEEE; (C) Smooth shielding tape. Adapted with permission[7], Copyright 2020, IEEE; (D) Friction film. Adapted with permission[8], Copyright 2022, IEEE; (E) Anisotropic friction pads. Adapted with permission[9], Copyright 2013, IEEE; (F) Silicone foot pads. Reproduced under the Creative Commons Attribution (CC BY 4.0) license[10]; (G) Varying leg height to change the tilted posture of the robot body. Adapted with permission[11], Copyright 2019, IEEE; (H) Changing the tangential contact length of the front and rear legs with the ground. Reproduced under the Creative Commons Attribution (CC BY 4.0) license[12]; (I) Different foot structures, such as curved and straight needles. Adapted with permission[13], Copyright 2017, IEEE; (J) Pneumatic actuation combined with silicone materials to modulate the friction coefficient. Adapted with permission[14], Copyright 2019, IEEE; (K) A pneumatic peristaltic soft actuator with pressure-induced radial expansion for friction-based attachment. Reproduced under the Creative Commons Attribution (CC BY 4.0) license[15].





