


fig17
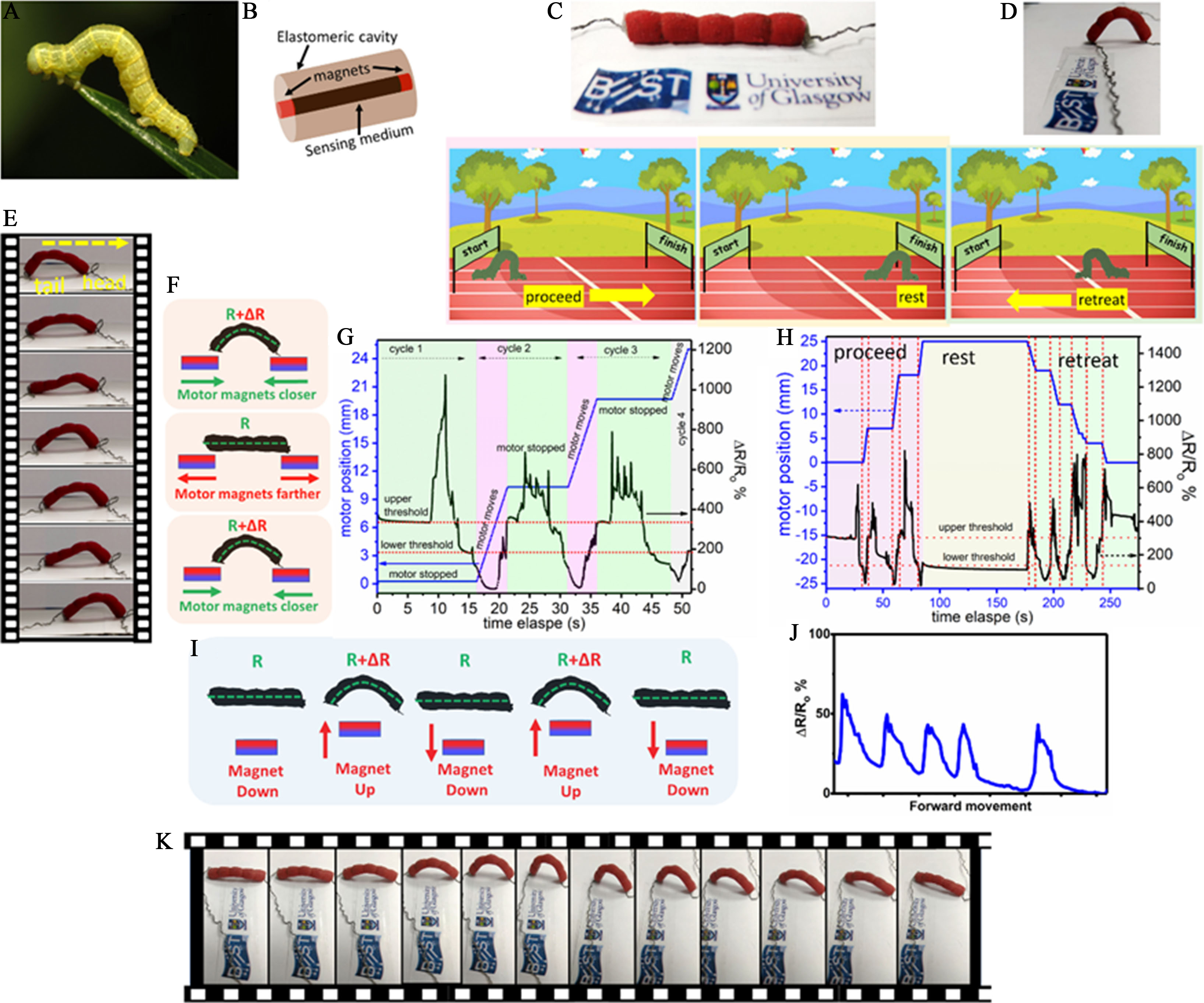
Figure 17. Inchworm-type soft-body robot designed by Karipoth et al.[49]. (A) Inchworm; (B) Cross-section of the inchworm-type soft-body robot; (C) Fabricated inchworm soft-body robot; (D) Bending configuration; (E) Motion sequence; (F) Kinematic mechanism under magnetic field actuation; (G) Transient strain-sensing response during motion; (H) Forward and reverse motion; (I) Schematic representation of motion under single-magnet actuation; (J) Single-sensor response during magnet actuation; (K) Motion cycle under single-magnet actuation. Reproduced under the Creative Commons Attribution (CC BY 4.0) license[49].





