


fig16
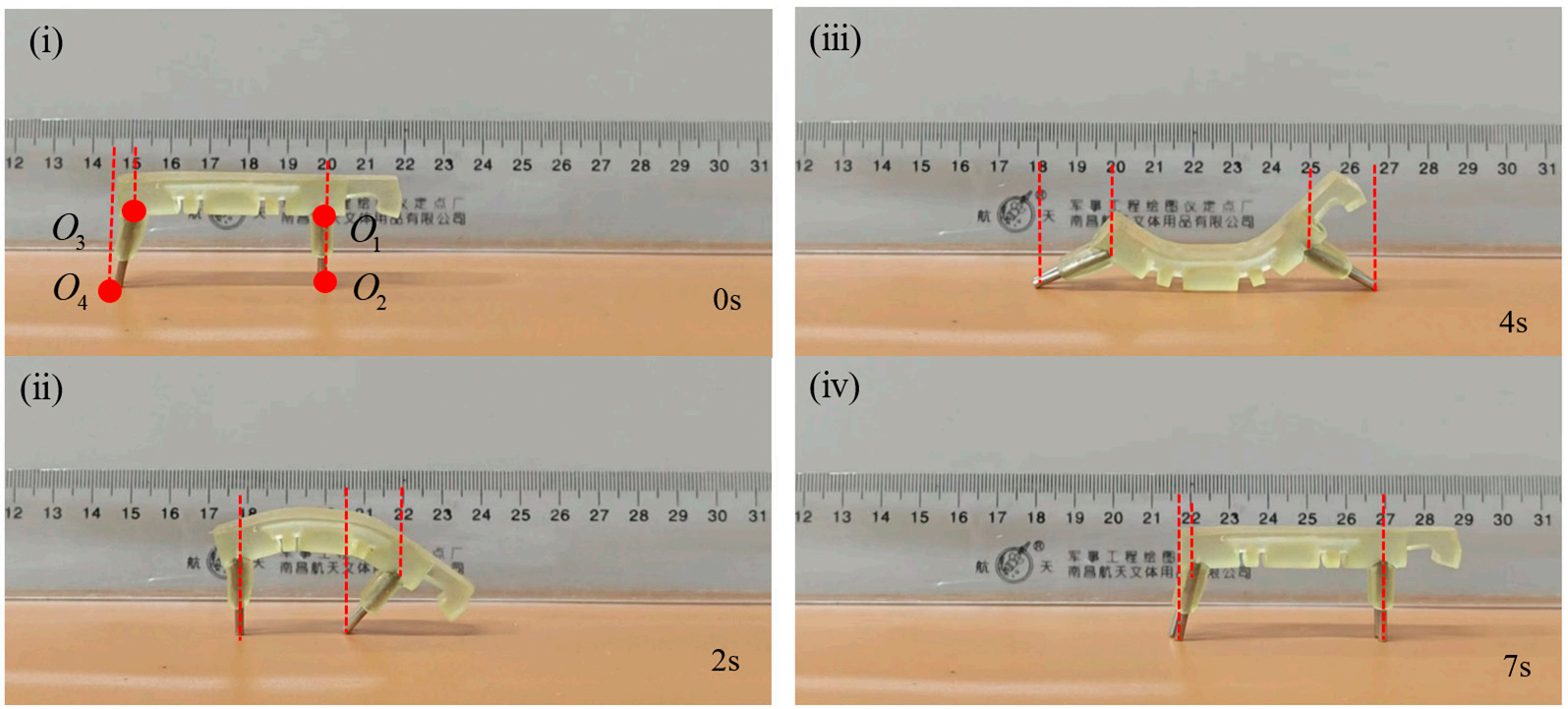
Figure 16. Locomotion cycle of a magnetically actuated soft inchworm robot. (i) The locomotion cycle starts with the activation of the proximal balloon, which inflates and establishes firm anchoring with the surrounding lumen wall, providing a stable support for subsequent motion; (ii) After the proximal balloon is anchored, the soft pneumatic actuator (SPA) is activated. Depending on the orientation and geometry of the lumen, the SPA expands and bends, producing axial extension that advances the distal section of the robot forward; (iii) Subsequently, the distal balloon is activated and inflated, generating anchoring at the front end. At this stage, both the proximal and distal ends are temporarily fixed, ensuring positional stability during the transition phase; (iv) The proximal balloon is then deactivated and deflated, releasing the rear anchoring. With the distal end remaining fixed, the body contraction of the SPA pulls the proximal section forward, completing one inchworm-like locomotion step. Reproduced under the Creative Commons Attribution (CC BY 4.0) license[47].





