


fig11
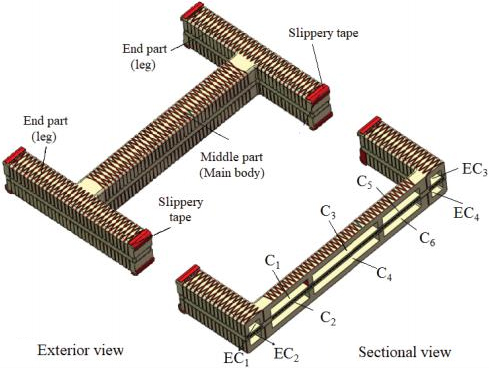
Figure 11. Configuration and structure of the robot. C1–C6 stand for the corresponding chambers. ECi stands for the ith end chamber. Reproduced with permission[6], Copyright 2018, IEEE.
Figure 11. Configuration and structure of the robot. C1–C6 stand for the corresponding chambers. ECi stands for the ith end chamber. Reproduced with permission[6], Copyright 2018, IEEE.


All published articles are preserved here permanently:
https://www.portico.org/publishers/oae/


