


Figure3
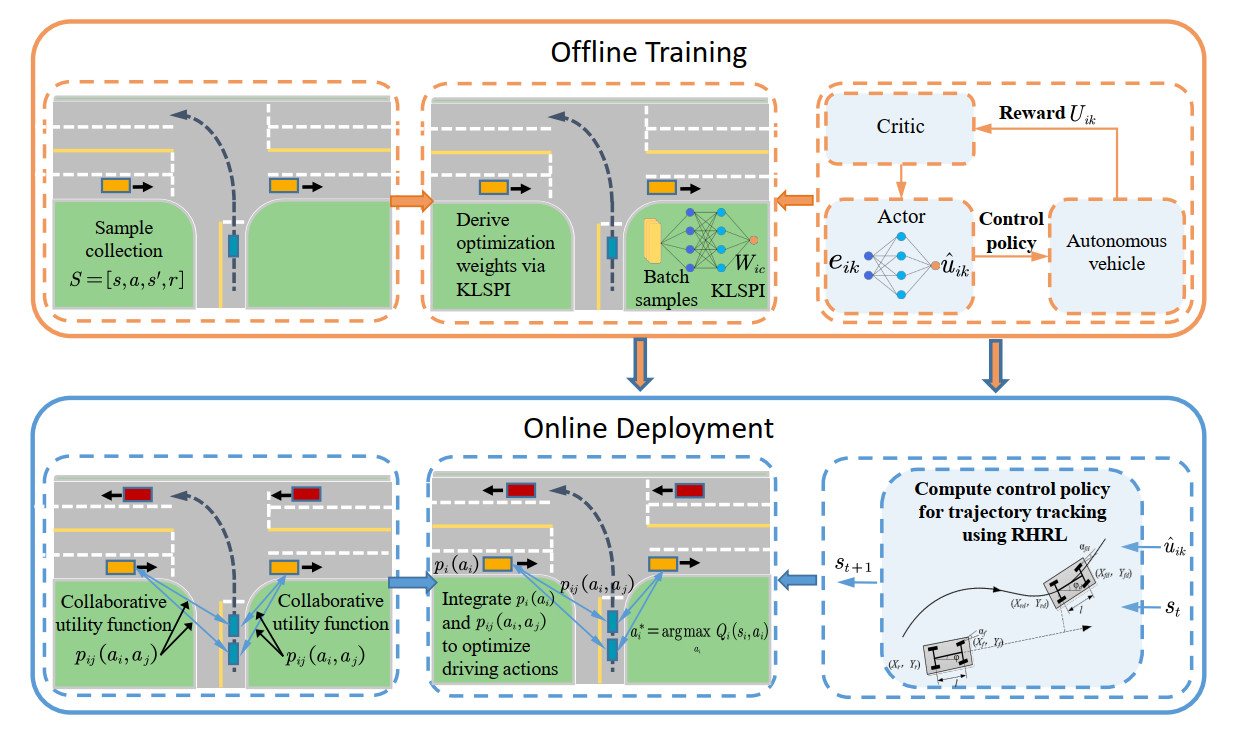
Figure 3. The block diagram of the proposed LCDMC algorithm. LCDMC: Learning-based cooperative decision-making and control.
Figure 3. The block diagram of the proposed LCDMC algorithm. LCDMC: Learning-based cooperative decision-making and control.


All published articles are preserved here permanently:
https://www.portico.org/publishers/oae/


