


A phase search-enhanced Bi-RRT path planning algorithm for mobile robots

Abstract
The proposed improvement to the Rapidly-exploring Random Tree (RRT) path planning algorithm is aimed at addressing the issue of slow convergence speed caused by boundary information in the original algorithm, by introducing a phase search approach. The initial approach involves employing a three-stage search strategy to generate sampling points that are specifically oriented toward real-time sampling failure rate, thereby significantly reducing the number of redundant nodes. Simultaneously, a balanced exploration strategy is introduced, enhancing the algorithmos convergence speed by constructing two randomly growing trees for searching. Secondly, a path-pruning strategy is implemented, effectively reducing the path length. Finally, the bidirectional exploration technique from the improved algorithm is applied to the traditional RRT algorithm based on boundary information, and comparative experiments are conducted. The experimental results demonstrate that, compared to the traditional boundary-based RRT method, the proposed improved algorithm reduces the running time by 13.4% and decreases the path length by 9.51%.

Keywords
1. INTRODUCTION
With the rapid advancement of robotics, mobile robots are increasingly employed in military applications, industrial, medical, logistics, service [1-4] and agriculture fields[5]. Mobile robots have a wide range of applications thanks to the development of autonomous navigation technology. Path planning and trajectory tracking are at the core of autonomous navigation for mobile robots[6, 7]: the former designs obstacle avoidance paths based on criteria such as time and distance, and the latter ensures that the robot accurately tracks the path and responds to dynamic disturbances. In the field of path planning, there are several main approaches, including state-space search algorithms represented by the A*-algorithm [8], intelligent bionic algorithms represented by particle swarm optimization (PSO)[9] and intelligent bug swarm algorithms (IBA)[10], stochastic sampling methods lefted around Rapidly-exploring Random Tree (RRT)[11], and machine learning methods based on reinforcement learning[12]. Among these methods, the A* algorithm has gained popularity because it enables robots to search for optimal results accurately. Nevertheless, it is computationally demanding, exhibits poor real-time capabilities, and requires extensive computation time, and the algorithm's search efficiency deteriorates as the number of traversed nodes increases[13]. To reduce the computation time of the A* algorithm, a time-efficient A* improvement algorithm based on time efficiency is proposed by Guruji et al. [14]. This method optimizes the speed of path planning by accepting slightly longer paths; however, these paths have more turning points, making it difficult for robots to meet their kinematic requirements during actual travel. RRT is a path-planning method that employs a sampling-based search strategy. The algorithm begins at the starting point, samples random points, and identifies the closest obstacle-free point to each sample within the random tree. This point is then added to the tree. This process is repeated until the vicinity of the endpoint is thoroughly explored[15].
The random tree expansion algorithm has been enhanced to boost its capabilities, and researchers have proposed various improved versions. For example, the RRT-Goal Bias[16, 17] algorithm directs random samples to the endpoint with a certain probability, thus increasing the likelihood that a path to the goal will be found by the algorithm. Extend RRT[18] algorithm further introduces the concept of a collection of path points, which accelerates the convergence of the algorithm and enhances the stability of the generated paths. Additionally, Palmieri et al. introduced an RRT-based motion planning algorithm that addresses arbitrary angle path bias[19]. This method utilizes an arbitrary angle search technique to find the near-optimal path in a discrete search manner. So that, the performance of this method exhibits large differences under different environmental conditions. This algorithm grows two fast-expanding randomized trees simultaneously from the starting point and the endpoint, connecting these two trees through a greedy heuristic method, thereby significantly improving the speed of path search. However, the Bidirectional (Bi)-RRT algorithm has several significant drawbacks: the random sampling of the algorithm results in too many redundant nodes, leading to a low search speed, and the convergence speed needs to be enhanced.
Many researchers have invested significant effort into improving and optimizing the limitations of the Bi-RRT algorithm. Ma et al. introduced the probabilistic smoothing bidirectional RRT (PSBi-RRT) algorithm, which enhances the traditional Bi-RRT by incorporating a goal bias strategy, a node correction mechanism, and a
In this paper, an improved phase search-based Bi-RRT path planning algorithm for mobile robots has been proposed. Initially, a three-phase search strategy is implemented, whereby sampling points are generated under the guidance of the real-time sampling failure rate, and by balancing the exploration strategy, two randomly growing trees are concurrently established for searching, enhancing the algorithm's convergence speed. Secondly, by introducing a path pruning strategy, the overall path length is efficiently shortened and the quantity of superfluous nodes is substantially decreased. Finally, the superiority of the proposed algorithm is verified through simulation and real comparative experiments on Matlab and Robot Operating System (ROS).
The rest of the paper is organized as follows:Section 2 systematically describes the principles of the fast search random tree algorithm for path planning based on boundary information;Section 3 proposes a multidimensional optimization strategy for the BI-RRT framework, and each subsection discusses specific improvements such as probabilistic bias adaptation and dynamic heuristic constraints;Section 4 validates the algorithm through simulation and physical experiments in a complex obstacle environment effectiveness and compares it with the conventional RRT, its bidirectional variant (Bi-RRT), and the original BI-RRT; finally, the last section summarizes the main findings and outlines future research directions for autonomous navigation systems.
2. BOUNDARY-INFORMED RRT
The current RRT algorithm has disadvantages such as more search nodes and longer planning paths; Wang et al. restricted the sampling domain of the RRT algorithm to the environs of value obstacles, thus reducing the number of nodes generated by sampling, improving the efficiency of the algorithm in path planning, and optimizing the path length at the same time[22].
As shown in Figure 1, since the straight line between the starting point and the target is the optimal path, it is easy to see that it is easier to obtain the optimal path by sampling in the vicinity of the obstacles crossed by this line. In the RRT algorithm, the focus is more on avoiding the barriers, resulting in the planned path needing to be optimized more. At the same time, due to the sampling process's randomness, the path search takes a lot of time.

Figure 1. Diagram for detecting the valuable obstacles.
In the value obstacle method, as shown in Figure 1, obstacles 2, 3, and 4 (marked in green) are regarded as value obstacles because they are crossed by a straight line from the start to the end.
Within the number of iterations, the value obstacle detection function
3. PHASE SEARCH BI-RRT
This section introduces a novel approach that integrates and enhances the Bi-RRT algorithm. By harnessing the benefits of boundary information guidance and bidirectional search, this method aims to further optimize the efficiency of path planning and decrease computational expenses.
3.1. Fundamentals
The basic principle of the Bi-RRT algorithm is to construct a randomized tree in space with the target point and the initial point as the root node simultaneously, respectively, and generate connected paths by expanding the two randomized trees alternately in relative directions to save path search time. The pseudo-code of Bi-RRT algorithm is shown in Algorithm 1 as follows.
Algorithm 1: Algorithm of Improved RRT Based on Boundary Information
1:
2: for
3:
4:
5:
6:
7: if
8:
9:
10:
11:
12:
13: if
14:
15:
16: do
17: if
18:
19:
20: else
21:
22: end if
23: while {
24: end if
25: if
26:
27: end if
28: end if
29: end for
The basic steps of the algorithm are as follows:
(1) In the known state space
(2) Use the random function to generate a random point in global space
(3) Detect whether there is an obstacle between
(4) Similar to the above process, generate
(5) When the spacing between two nodes on the random tree
(6) Perform path backtracking to find and connect its parent node forward from the goal point, repeat this process until it connects to the start point, and generate a feasible path connecting the goal and start points.
3.2. Balancing exploration strategies with three stage search strategies
Aiming at the problem that the Bi-RRT algorithm has a long sampling time and produces too many redundant nodes, this paper introduces a balanced exploration strategy that effectively improves the efficiency of path search by generating the search tree from two directions simultaneously.
This paper uses a three-stage search strategy based on the real-time sampling failure rate. The novel search methodology adjusts the extension of
where
The creation of the reference points is illustrated in Figure 2. The light gray point labeled

Figure 2. Reference point extension diagram.
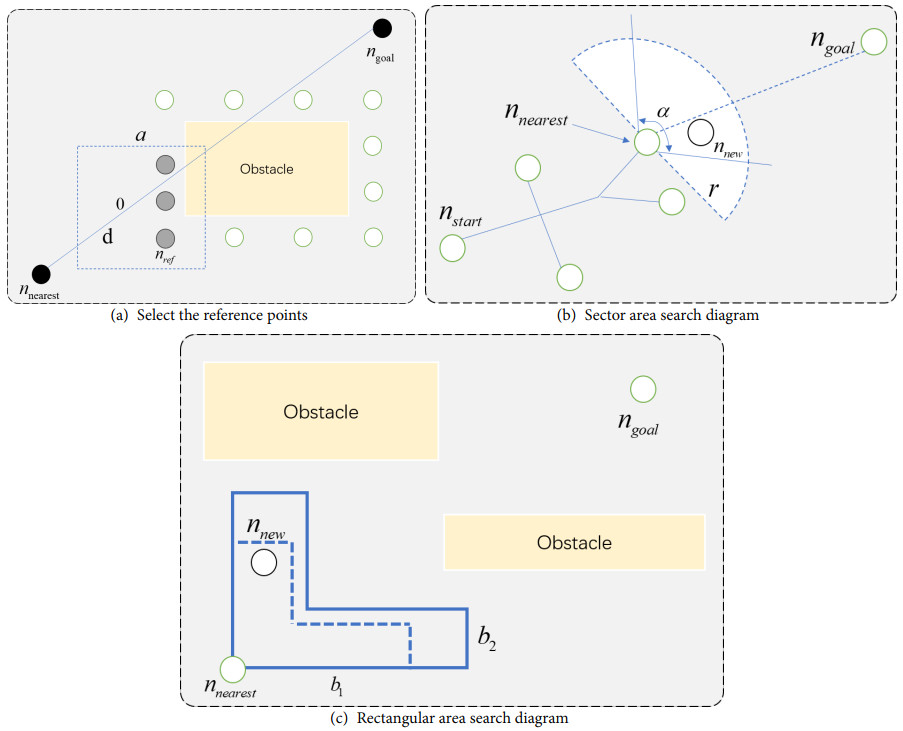
Figure 3. Diagram of reference point selection and search area.
where
The Dynamic Right Angle Search (DRAS) strategy and the Adaptive Sector Search (ASS) strategy exhibit identical algorithmic flows. The distinction lies in the DRAS policy, which substitutes the sector sampling region with a dynamic right-angle sampling region. This right-angle sampling region propels itself toward
where
3.3. Path pruning strategy
The RRT and Bi-RRT algorithms generate an excessive number of redundant nodes in narrow channel environments, leading to the algorithms' high path cost. In this paper, we optimize the node redundancy problem in the RRT algorithm from two aspects. First, referring to the idea of the RRT* algorithm, the paths can be pruned by comparing the costs of the paths to remove the unnecessary high-cost parts to obtain a better path. Secondly, a triangular pruning strategy will be applied after receiving the feasible paths.
Upon identifying a feasible path, the algorithm employs a triangular pruning strategy, which hinges on the principle that the sum of the lengths of any two sides of a triangle exceeds the length of the third side. The path pruning process is depicted in Figure 4. When the non-collision point

Figure 4. Triangle pruning diagram.
3.4. Improvement of Bi-RRT
The RRT algorithm is based on boundary information, and the improved Bi-RRT algorithm is fused to ensure the overall operational efficiency and stability of the algorithm. First, a two-dimensional grid map is created by Light Detection and Ranging (Lidar), and the value obstacles in the map are labeled using the RRT algorithm based on boundary information. Second, the fusion of the improved Bi-RRT algorithm improves the convergence speed of the algorithm by reducing the generation of redundant nodes through the balanced exploration strategy and the three-stage search strategy. Further, the path pruning strategy is used to optimize the generated paths, effectively improving the overall efficiency of path planning. The algorithmic flow of the convergence algorithm is shown in Figure 5. The specific steps are summarized as follows:

Figure 5. Algorithm flowchart for boundary-information RRT with NCB-RRT. RRT: Rapidly-exploring random tree; NCB-RRT: nonholonomic constraints-based rapidly-exploring random tree.
(1) Add the initial point
Algorithm 2: Pseudocode of Improved Bi-RRT algorithm
1:
2:
3:
4:
5: while
6:
7:
8:
9:
10:
11:
12:
13:
14: if
15:
16:
17: end if
18: if
19: return
20: collisionFree2 = Checkcollision (xnew, xgoal);
21: else if (collisionFree2== true) then
22:
23: else
24:
25: end if
26: end while
27: return failure
(2) The maximum number of iterations the user can set max iteration. If the algorithm fails to find a feasible path within the specified maximum number of iterations, it will return to failure (Algorithm 2, line 27). Within the number of iterations, the value obstacle detection function
(3) The three-stage search strategy is run. First, the algorithm finds the closest point to the endpoint in the search tree denoted as
(4) Repeat the above process until a collision-free path is found from the start to the target point.
4. SIMULATION RESULTS AND ANALYSIS
4.1. Algorithm simulation and analysis
To assess the efficacy of the proposed algorithm, it was compared against the RRT algorithm, the Bi-RRT algorithm, and the boundary information-based RRT algorithm. The superior performance of the proposed algorithm was evaluated in terms of path length, the number of nodes generated, and the computational time required.
The search component of the proposed algorithm in this paper consists of three distinct stages. The SFRT serves as the critical indicator for delineating these stages. To optimize the algorithm's performance across varying environments, it is essential to select appropriate SFRT values accordingly. Therefore, we systematically traverse the SFRT parameter space from 0 to 1 with a step size of 0.1. A cost function is specifically designed to select the optimal threshold configuration by identifying the group with the lowest average cost in each environment, as given in
where
The hardware environment used for simulation is a computer with Intel Core(TM) i5-1135G7 CPU @3.5GHz.16GB RAM with Windows 10 system, and the software environment is Matlab R2018b. The simulation experimental environment adopts the 600
Figure 6 shows the simulation comparison of the algorithm in the complex obstacle environment. Figure 6A presents the simulation of the RRT algorithm, which causes the algorithm to explore blindly due to the random selection of sampling points, resulting in the generation of more redundant nodes. Figure 6B shows a feasible path planned by Bi-RRT, which makes the search rate much higher and generates a better path by growing the tree in both directions. However, the algorithm still generates many redundant nodes. Figure 6C demonstrates the RRT algorithm based on boundary information from the figure. The number of nodes of the algorithm can be significantly reduced, and the planning efficiency is further improved. Figure 6D depicts the simulation of the proposed algorithm at the SFRT = 0.2. Thanks to the path-pruning strategy, the node utilization of the algorithm is further improved, and the search performance is significantly enhanced.

Figure 6. Simulation in the crowded environment. RRT: Rapidly-exploring random tree; Bi-RRT: bidirectional-rapidly-exploring random tree.
Due to the three-stage search strategy, the proposed algorithm can significantly improve the convergence speed of the algorithm by evaluating the real-time sampling failure rate p associated with the threshold SFRT as a measure of the complexity of the current environment. From the data analysis in Figure 7, it can be seen that in terms of path length, it is improved by about 37.32

Figure 7. Performance comparison.
4.2. Real environment experiment
To deeply verify the effect of the algorithms proposed in this paper in practice, the authors decided to use a highly realistic and operable software experimental platform, ROS. ROS is an open-source software platform and a general platform widely accepted by most robot developers[23]. The experiments in this paper use a customized mobile robot with a differentially driven motor on each side to control its forward motion. The front of the robot is also equipped with an auxiliary wheel whose main function is to provide balancing support to ensure that the robot remains stable and non-slip during its movement.
The homemade mobile robot based on the above was experimented in a complex indoor environment to verify the effectiveness and robustness of the algorithm. The complex indoor environment is shown in Figure 8A. The dimensions of the environment in the laboratory are 10.8

Figure 8. Experimental environment.
In this paper, a comparison experiment between the proposed algorithm and the RRT algorithm based on boundary information is carried out in a complex indoor environment as shown in Figure 9. The proposed algorithm is used in the experimental scenario. The proposed algorithm introduces a balanced exploration strategy, which effectively improves search efficiency by generating the search tree from two directions simultaneously. In addition, the introduced three-stage search strategy also enhances the quality of sampling points. As for the improved RRT algorithm based on boundary information, since the selection of sampling points near the obstacles is randomized, in real experimental scenarios, the robot will turn in place and move backward around the obstacles (as shown in Figure 9).

Figure 9. Results of the RRT algorithm using boundary data. (A) Schematic showing the robot spinning around an obstacle; (B) Schematic of the robot spinning during operation; (C) Schematic of the robot spinning near the target point; (D) Rviz interface showing the schematic of the robot spinning near an obstacle; (E) Rviz interface showing schematic of robot spinning near an obstacle; (F) Rviz interface showing schematic of robot spinning near a target point. RRT: Rapidly-exploring random tree.
In contrast, the algorithm proposed in this paper introduces a balanced exploration strategy, which effectively improves the search efficiency by simultaneously generating the search tree from two directions. In addition, the introduced three-stage search strategy also improves the quality of the sampling points, which significantly reduces the in-situ steering and backward phenomenon of the boundary RRT algorithm. According to the actual measurement, the deviation of the final position of the robot from the expected target point is less than 0.1 meter, which basically meets the requirements of actual robot navigation [Figure 10].

Figure 10. Experimental results of the improved RRT algorithm. (A) Diagram of the robot's movement process; (B) Diagram of the robot reaching the target point; (C) Rviz interface during the movement process; (D) Rviz interface when the robot reaches the target point. RRT: Rapidly-exploring random tree.
Combined with the experimental results in Figure 11, the proposed algorithm in this paper improves the running time by 13.4

Figure 11. Experimental results comparison.
5. FUTURE WORK
The algorithm proposed in this study demonstrated good performance in static environments, but there are still some limitations and areas for improvement. Firstly, we will further explore the applicability of the algorithm in dynamic environments, such as handling the situation of moving obstacles, to verify its robustness and real-time performance. Additionally, in response to the issue of computational overhead, we will strive to optimize the efficiency of the algorithm, reduce resource consumption, and study its applicability on different robot platforms (such as unmanned aerial vehicles and wheeled robots). For the application scenarios of unmanned aerial vehicles, we need to extend the algorithm from 2D space to 3D space to support a wider range of practical needs. Finally, we plan to combine reinforcement learning with existing algorithms to achieve adaptive adjustment and dynamic optimization, thereby further enhancing the performance and practicality of the algorithm.
6. CONCLUSIONS
This paper presents an enhanced Bi-RRT algorithm based on boundary information. Initially, a balanced exploration strategy is employed to search for new nodes by constructing two alternating random trees. Concurrently, a three-stage search strategy is implemented to enhance the quality of sampling points. Additionally, to address the issue of winding generated paths in the Bi-RRT algorithm, a path pruning strategy is introduced, where paths are pruned by comparing their costs, thereby optimizing the generated paths. Furthermore, the convergence speed of the algorithm is further improved by integrating the enhanced Bi-RRT with the boundary information-based RRT algorithm. Finally, simulations and experiments demonstrate that the algorithm not only outperforms mainstream path planning algorithms such as RRT and Bi-RRT but also that the fusion algorithm surpasses the boundary information-based RRT algorithm in terms of algorithmic time and path length. Future work will focus on enhancing the algorithm's adaptability across various scenarios, real-time performance, and path safety.
DECLARATIONS
Authors' contributions
Made substantial contributions to the research, idea generation, algorithm design, simulation, wrote and edited the original draft: Sun, Y.; Zhu, H.; Liang, Z.
Performed data acquisition and provided administrative, technical, and material support: Ni, H.; Liu, A.; Wang, Y.
Availability of data and materials
The data that support the findings of this study are available from the corresponding author upon reasonable request.
Financial support and sponsorship
This work has been funded by the Key Research and Development Program of Zhejiang Province (Project No. 2023C01224).
Conflicts of interest
Liu, A. is the Junior Editorial Board Member of the journal Intelligence & Robotics. Liu, A. was not involved in any steps of editorial processing, notably including reviewer selection, manuscript handling, or decision-making. The other authors declare that there are no conflicts of interest.
Ethical approval and consent to participate
Not applicable.
Consent for publication
Not applicable.
Copyright
© The Author(s) 2025.
REFERENCES
1. Liu, S.; Wang, X.; Wu, Y.; Li, Q.; Yan, J.; Levin, E. Path planning method for USVs based on improved DWA and COLREGs. Intell. Robot. 2024, 4, 385-405.
2. Jin, Z.; Liu, A.; Zhang, W. A.; Yu, L.; Yang, C. Learning an autonomous dynamic system to transfer periodic human motion skills. IEEE. Tran. Neural. Netw. Learn. Syst. 2025, 36, 7757-63.
3. Qin, D.; Jin, Z.; Liu, A.; Zhang, W. A.; Yu, L. Asynchronous event-triggered distributed predictive control for multi-agent systems with parameterized synchronization constraints. IEEE. Trans. Autom. Control. 2024, 69, 403-9.
4. Jin, Z.; Si, W.; Liu, A.; Zhang, W. A.; Yu, L.; Yang, C. Learning a flexible neural energy function with a unique minimum for globally stable and accurate demonstration learning. IEEE. Tran. Robot. 2023, 39, 4520-38.
5. Hassan, M. U.; Ullah, M.; Iqbal, J. Towards autonomy in agriculture: design and prototyping of a robotic vehicle with seed selector. In 2016 2nd International Conference on Robotics and Artificial Intelligence (ICRAI), Rawalpindi, Pakistan. Nov 01-02, 2016. IEEE; 2016. pp. 37-44.
6. Balding, S.; Gning, A.; Cheng, Y.; Iqbal, J. Information rich voxel grid for use in heterogeneous multi-agent robotics. Appl. Sci. 2023, 13, 5065.
7. Saleem, O.; Hamza, A.; Iqbal, J. A fuzzy-immune-regulated single-neuron proportionalɃintegralɃderivative control system for robust trajectory tracking in a lawn-mowing robot. Computers 2024, 13, 301.
8. Huang, H.; Li, Y.; Bai, Q. An improved A star algorithm for wheeled robots path planning with jump points search and pruning method. Complex. Eng. Syst. 2022, 2, 11.
9. Tawhid, M. A.; Ibrahim, A. M. An efficient hybrid swarm intelligence optimization algorithm for solving nonlinear systems and clustering problems. Soft. Comput. 2023, 27, 8867-95.
10. Zohaib, M.; Pasha, S. M.; Javaid, N.; Iqbal, J. IBA: intelligent bug algorithm – A novel strategy to navigate mobile robots autonomously. In: Shaikh, F.; Chowdhry, B.; Zeadally, S.; Hussain, D.; Memon, A.; Uqaili, M. editors. Communication technologies, information security and sustainable development. IMTIC. 2013. Communications in Computer and Information Science. Springer, Cham; 2014. pp. 291-9.
11. LaValle, S. M.; Kuffner, J. J. Randomized kinodynamic planning. In Proceedings 1999 IEEE International Conference on Robotics and Automation (Cat. No. 99CH36288C), Detroit, USA. May 10-15, 1999. IEEE; 1999. pp. 473-9.
12. Hua, M.; Zhou, W.; Cheng, H.; Chen, Z. Improved DDPG algorithm-based path planning for unmanned surface vehicles. Intell. Robot. 2024, 4, 363-84.
13. Ha, I. K. Improved A-star search algorithm for probabilistic air pollution detection using UAVs. Sensors 2024, 24, 1141.
14. Guruji, A. K.; Agarwal, H.; Parsediya, D. K. Time-efficient A* algorithm for robot path planning. Proc. Technol. 2016, 23, 144-9.
15. Zhang, R.; Guo, H.; Andriukaitis, D.; Li, Y.; Królczyk, G.; Li, Z. Intelligent path planning by an improved RRT algorithm with dual grid map. Alex. Eng. J. 2024, 88, 91-104.
16. Xia, Z.; Chen, G.; Xiong, J.; Zhao, Q.; Chen, K. A random sampling-based approach to goal-directed footstep planning for humanoid robots. In 2009 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Singapore. Jul 14-17, 2009. IEEE; 2009. pp. 168-73.
17. Urmson, C.; Simmons, R. Approaches for heuristically biasing RRT growth. In Proceedings 2003 IEEE International Conference on Intelligent Robots and Systems, Las Vegas, USA. Oct 27-31, 2003. IEEE; 2003. pp. 1178-83.
18. Li, D.; Li, Q.; Cheng, N.; Song, J. Extended RRT-based path planning for flying robots in complex 3D environments with narrow passages. In 2012 IEEE International Conference on Automation Science and Engineering (CASE), Seoul, Korea. Aug 20-24, 2012. IEEE; 2012. pp. 1173-8.
19. Palmieri, L.; Koenig, S.; Arras, K. O. RRT-based nonholonomic motion planning using any-angle path biasing. In 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden. May 16-21, 2016. IEEE; 2016. pp. 2775-81.
20. Ma, G.; Duan, Y.; Li, M.; Xie, Z.; Zhu, J. A probability smoothing Bi-RRT path planning algorithm for indoor robot. Future. Gener. Comput. Syst. 2023, 143, 349-60.
21. Fan, H.; Huang, J.; Huang, X.; Zhu, H.; Su, H. BI-RRT*: an improved path planning algorithm for secure and trustworthy mobile robots systems. Heliyon 2024, 10, e26403.
22. Wang, J.; Li, X.; Meng, M. Q. H. An improved RRT algorithm incorporating obstacle boundary information. In 2016 IEEE International Conference on Robotics and Biomimetics (ROBIO), Qingdao, China. Dec 03-07, 2016. IEEE; 2016. pp. 625-30.
Cite This Article
How to Cite
Download Citation
Export Citation File:
Type of Import
Tips on Downloading Citation
Citation Manager File Format
Type of Import
Direct Import: When the Direct Import option is selected (the default state), a dialogue box will give you the option to Save or Open the downloaded citation data. Choosing Open will either launch your citation manager or give you a choice of applications with which to use the metadata. The Save option saves the file locally for later use.
Indirect Import: When the Indirect Import option is selected, the metadata is displayed and may be copied and pasted as needed.
About This Article
Copyright















Comments
Comments must be written in English. Spam, offensive content, impersonation, and private information will not be permitted. If any comment is reported and identified as inappropriate content by OAE staff, the comment will be removed without notice. If you have any queries or need any help, please contact us at [email protected].