


Volume 3, Issue 4 (December, 2023) – 11 articles
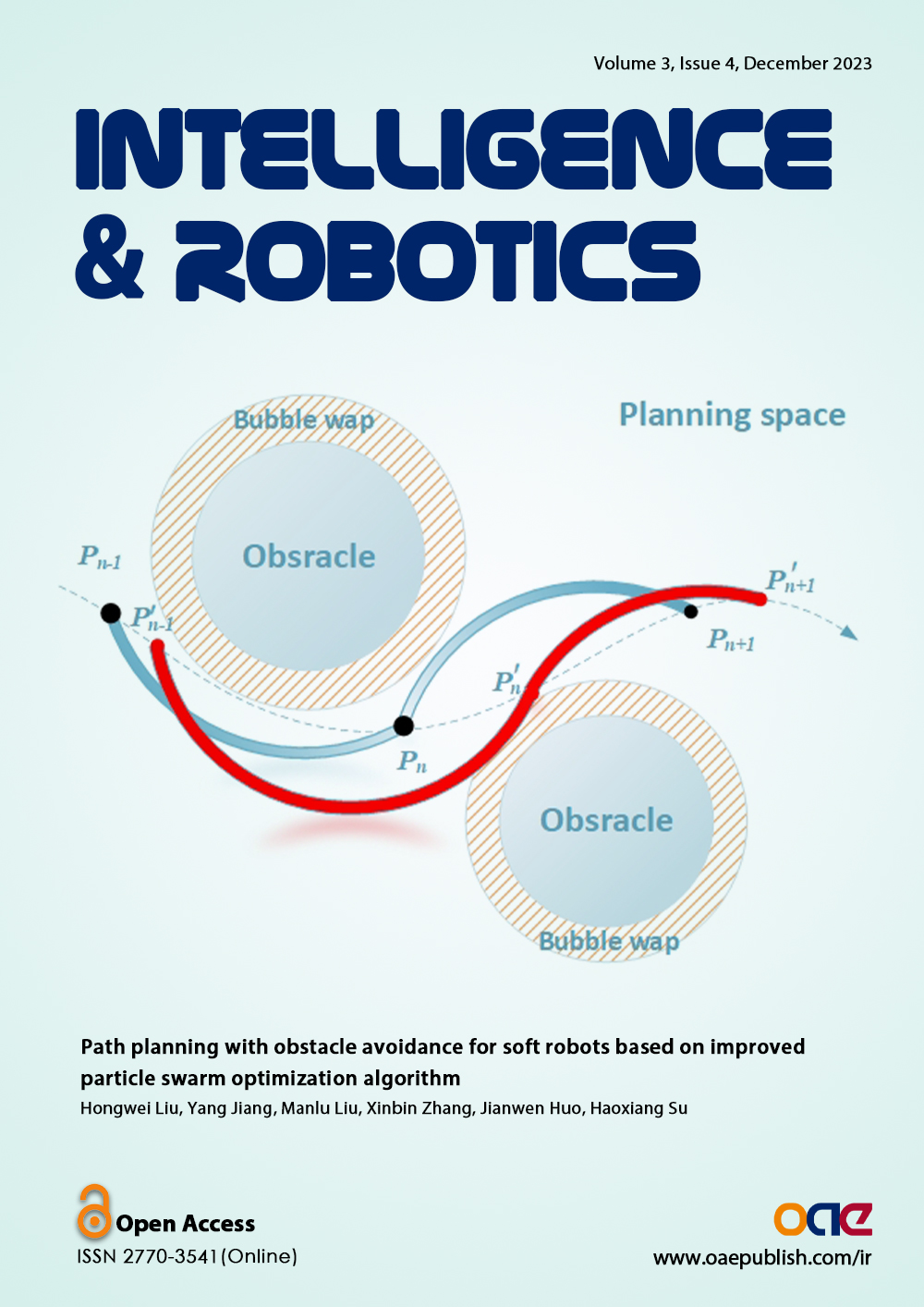
Cover Picture: Soft-bodied robots have the advantages of high flexibility and multiple degrees of freedom and have promising applications in exploring complex unstructured environments. Kinematic coupling exists for the soft robot in a problematic space environment for motion planning between the soft robot arm segments. In solving the soft robot inverse kinematics, there are only solutions or even no solutions, and soft robot obstacle avoidance control is tough to exist, as other problems. In this paper, we use the segmental constant curvature assumption to derive the positive and negative kinematic relationships and design the tip self-growth algorithm to reduce the difficulty of solving the parameters in the inverse kinematics of the soft robot to avoid kinematic coupling. Finally, by combining the improved particle swarm algorithm to optimize the paths, the convergence speed and reconciliation accuracy of the algorithm are further accelerated. The simulation results prove that the method can successfully move the soft robot in complex space with high computational efficiency and high accuracy, which verifies the effectiveness of the research.
view this paper 




