


Volume 3, Issue 2 (2023) – 9 articles
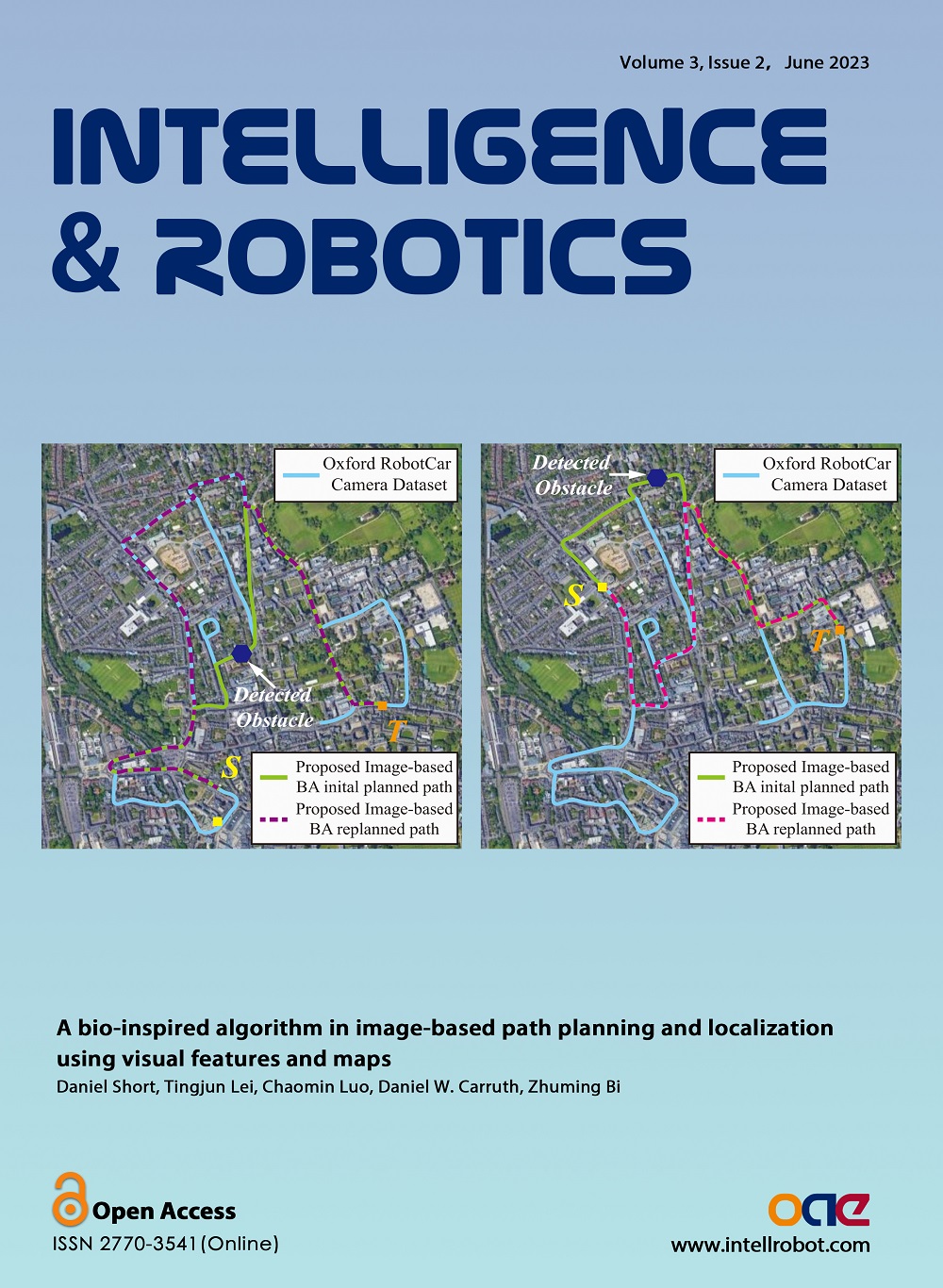
Cover Picture: With the growing applications of autonomous robots and vehicles in unknown environments, studies on image-based localization and navigation have attracted a great deal of attention. This study is significantly motivated by the observation that relatively little research has been published on the integration of cutting-edge path planning algorithms for robust, reliable, and effective image-based navigation. To address this gap, a biologically inspired Bat Algorithm (BA) is introduced and adopted for image-based path planning in this paper. The proposed algorithm utilizes visual features as the reference in generating a path for an autonomous vehicle, and these features are extracted from the obtained images by convolutional neural networks (CNNs). The paper proceeds as follows: first, the requirements for image-based localization and navigation are described. Second, the principles of the BA are explained in order to expound on the justifications for its successful incorporation in image-based navigation. Third, in the proposed image-based navigation system, the BA is developed and implemented as a path planning tool for global path planning. Finally, the performance of the BA is analyzed and verified through simulation and comparison studies to demonstrate its effectiveness.
Read Online Viewed:
Download This Issue Viewed:





