



fig5
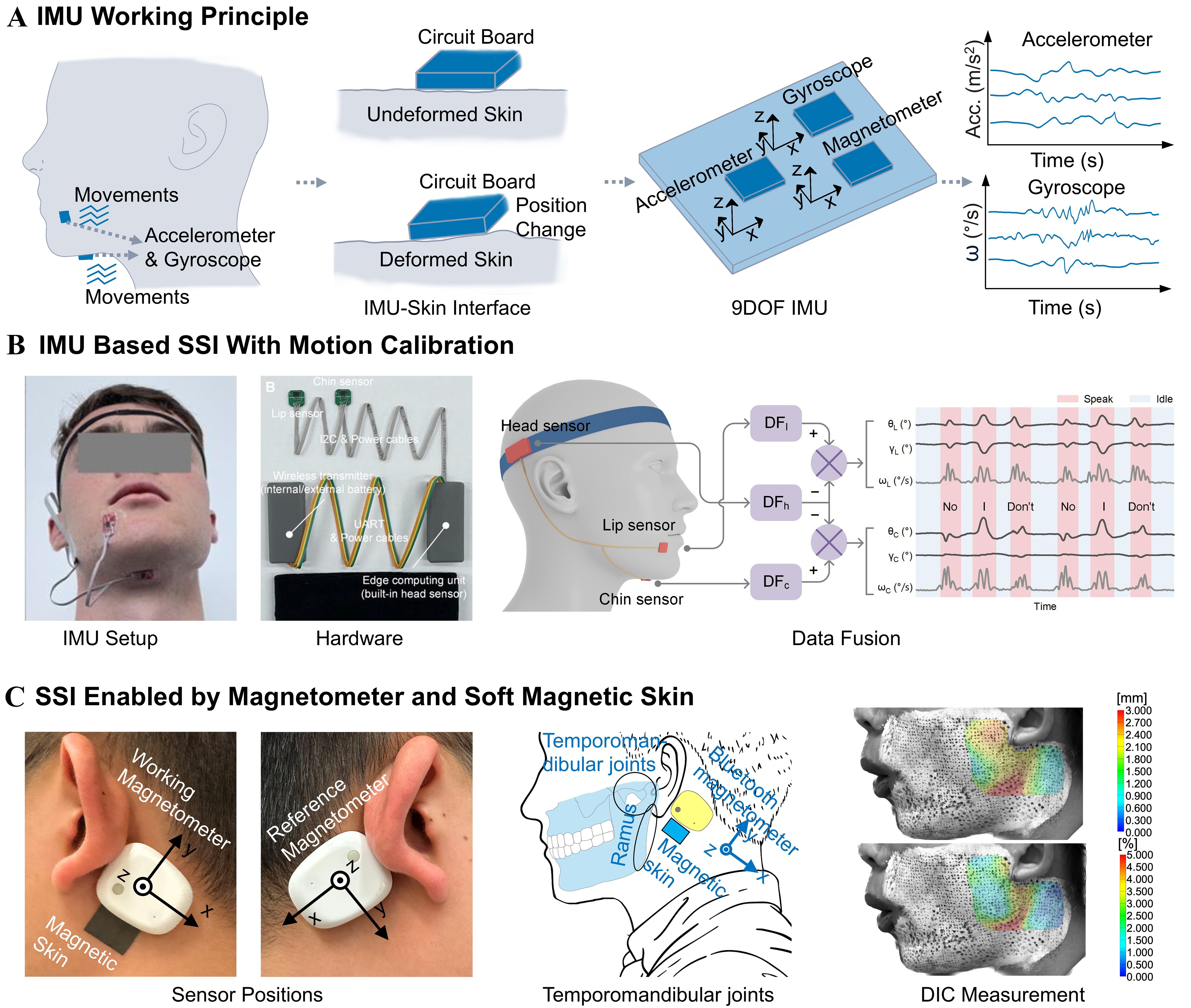
Figure 5. IMU-based SSIs. (A) Working principle of IMU-based SSIs. The left and right parts of (A): Adapted from Ref. [114], under CC BY 4.0 license; (B) IMU-based SSIs with calibration of head movements. Adapted from Ref. [114], under CC BY 4.0 license; (C) SSIs based on the soft magnetic skin and magnetometers. Adapted with permission from Ref. [115] Copyright 2023, RSC. IMU: Inertial measurement unit; SSIs: silent speech interfaces; DF: differential feature.





