



fig3
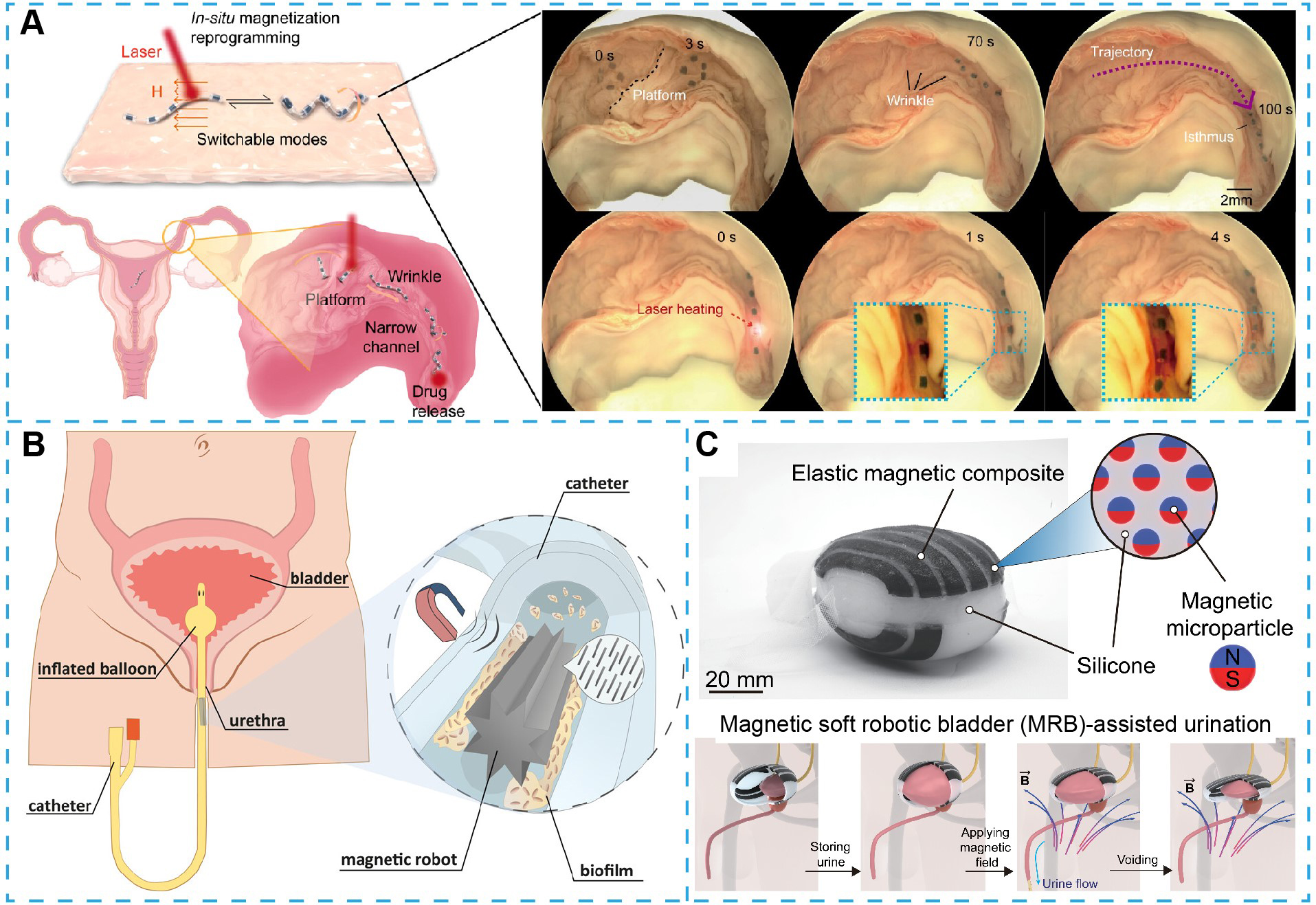
Figure 3. Small-scale magnetic soft robots for clinical applications in the urinary and reproductive systems. (A) Schematics and experimental demonstration of magnetic millirobots with switchable locomotion modes, including woodlouse-like rolling, flipping, snake-like gliding, and sperm-like rotation, designed to actively traverse complex anatomical barriers such as platforms, folds, and narrow channels in the oviduct for targeted drug delivery[186]. Copyright 2024 American Chemical Society; (B) Conceptual illustration of magnetic soft robots actuated by external magnetic fields to mechanically disrupt and remove biofilms from urethral catheter surfaces, reducing the risk of infection and device failure[187]. Copyright 2023 American Chemical Society; (C) Design of a magnetically actuated soft robotic bladder-assisted urination, constructed from silicone elastomer embedded with magnetic particles, intended to generate contractile force on demand to facilitate urination in cases of an underactive bladder[189]. Copyright 2022 American Association for the Advancement of Science.





