



Hydrogel actuators: from building blocks selection, anisotropic structures design to multifunctional applications
 0
0 Abstract
Flexible smart actuators that produce mechanical output in response to external stimuli have numerous applications in robotics, electronics, and biomedical engineering. With high similarity to biological tissues, high water content, and good tissue adhesion, hydrogels present unique advantages in preparing soft actuators. The development of integrated building blocks further enhances the structural controllability and performance tunability of hydrogel-based actuators. While current research predominantly focuses on the types of environmental responses and multi-field applications for hydrogel actuators, the critical role of integrated building blocks remains relatively underexplored. This review summarizes anisotropic strategies and multifunctional applications for hydrogel actuators based on the selection of stimuli-responsive building blocks (SRBs). Firstly, the deformation mechanism of hydrogel actuators with different polymer matrices is briefly introduced, followed by an overview of the anisotropic strategies employed in hydrogel actuators based on SRBs. The preparation strategies and high actuation performance of hydrogel actuators are discussed from the perspectives of building block properties and anisotropic structures. Moreover, the multifunctional application prospects of SRBs-based hydrogel actuators in information encryption, self-sensing, and intelligent grasping are discussed. Finally, the design principles and current challenges of stimuli-responsive hydrogel actuators are emphasized, and an outlook on the future development of novel hydrogel actuators is presented.
Keywords
INTRODUCTION
Hydrogels are attractive candidates for soft actuators and have been utilized in various applications, including robots[1-3], energy collectors[4,5], and biomedical devices[6-10], due to their softness, transparency, biocompatibility, and responsiveness to stimuli. Hydrogel-based soft actuators respond to external stimuli and change shape[11,12]. However, conventional hydrogels tend to suffer from weak mechanical properties, slow response time, and single deformation modes, thus hindering their practical application in actuators[13]. Therefore, researchers have proposed two main strategies: (1) Design toughening mechanisms with energy dissipation to enhance the mechanical performance of hydrogels[14,15]; (2) Introduce rationally designed stimuli-responsive materials and asymmetric structures to enable high-performance actuation of hydrogel actuators[16,17].
The design of toughened hydrogels mainly involves constructing many reversible covalent/non-covalent bonds to act as sacrificial bonds and thus dissipate energy during hydrogel deformation[18-20]. Reversible covalent/non-covalent bonds that have been reported so far include ligand bonds[21], hydrogen bonds[22], electrostatic interactions[23], hydrophobic interactions[24], and host-guest interactions[25]. These “sacrificial bonds” not only enhance hydrogel toughness but also confer additional functionalities, including self-healing[26], pH responsiveness[27], and adhesion properties[28]. In addition, researchers have designed hydrogels with different network structures to enhance their performance, such as dual network hydrogels[29,30], slip ring hydrogels[31], nanocomposite hydrogels[32], nanoparticle-enhanced hydrogels[33], and micellar crosslinked hydrogels[34]. Beyond enhancing the toughness of the hydrogel, it must also be able to respond to various external stimuli and undergo deformation. For this reason, external stimuli-responsive building blocks (SRBs) are widely used to endow hydrogels with stimulus responsiveness through volume/shape changes, thus enabling soft actuation.
For hydrogel actuators, performance dictates application potential, while constituent materials and structural design fundamentally determine performance. Materials critically enable not only stimulus responsiveness but also confer additional functionalities such as conductivity and luminescence that expand actuator capabilities beyond deformation. This facilitates broader and multifunctional applications. Moreover, asymmetric structures are essential for achieving high actuation performance. By strategically combining intrinsic material properties (electronegativity, paramagnetism, hydrophilicity/hydrophobicity) with advanced fabrication methods [external field induction, shear-force alignment, three-dimensional (3D) printing], researchers can engineer hydrogels with tailored network structures to achieve distinct deformation modes. Consequently, selecting optimal materials to meet multifunctional application requirements represents a fundamental design consideration for hydrogel actuator development.
SRBs critically determine the functionality of the hydrogel actuator[14,35]. Representative examples include thermoresponsive units, photoresponsive components, magnetically responsive elements, electrically conductive materials, pH-responsive polymers, ion-responsive compounds, and humidity-sensitive materials[36-39]. Incorporating these functional units into hydrogel networks through covalent/non-covalent interactions not only enhances gel performance but also confers multifunctionality, thereby expanding hydrogel actuator applications.
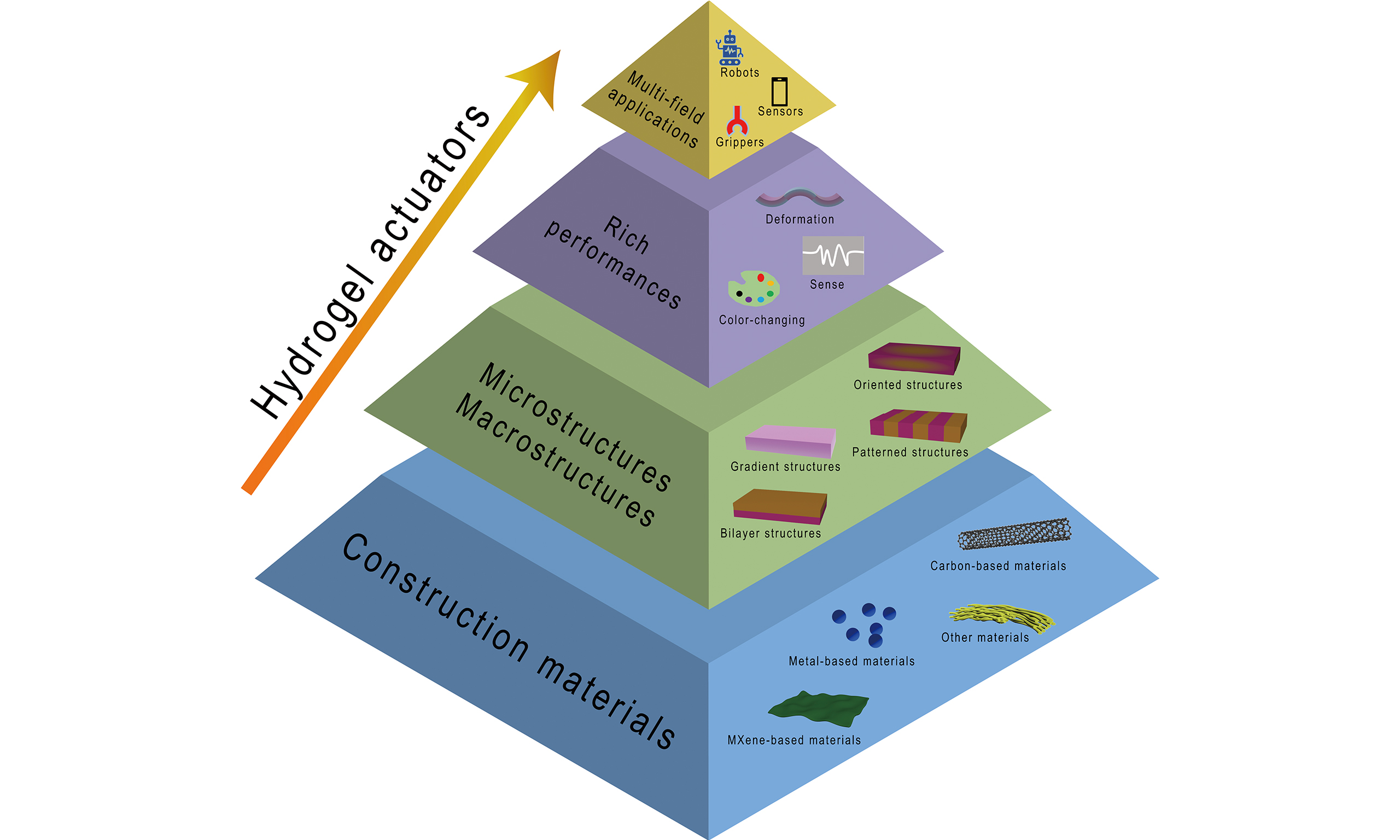
This review comprehensively summarizes recent advances in hydrogel actuators from the perspective of SRBs [Figure 1][32,40-46], including the fundamental characteristics of hydrogel polymer substrates, classification of SRBs and anisotropic structure design strategies, multifunctional capabilities, and corresponding applications. Additionally, we critically address current challenges and development requirements for stimuli-responsive hydrogel actuators, providing researchers with a foundational reference for designing next-generation multifunctional smart actuators.
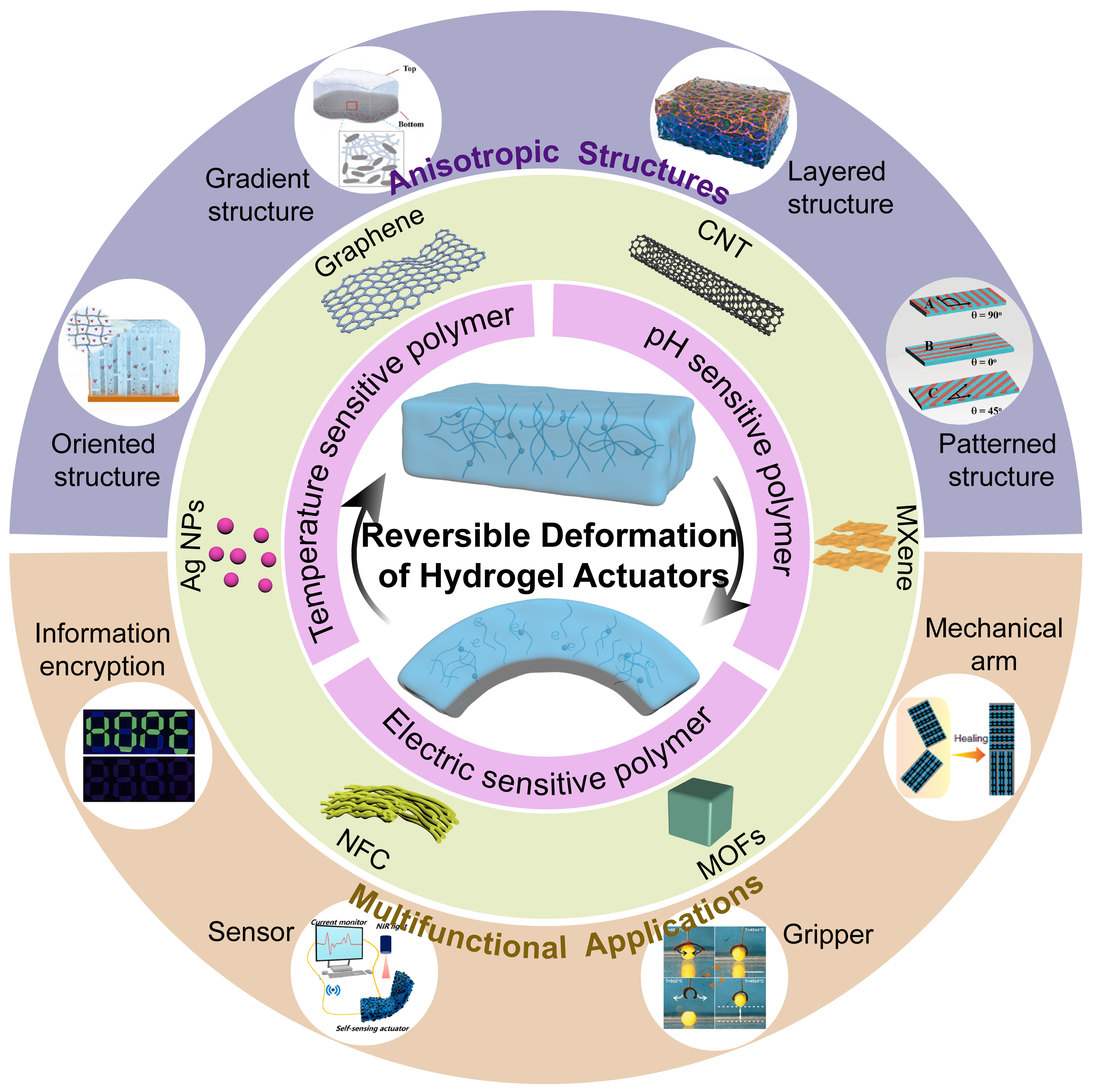
Figure 1. Schematic illustration of the design strategies for reversible deformation of hydrogel actuators. Design strategies (purple panel): Oriented structure. Reproduced with permission[40]. Copyright 2023, Wiley-VCH. Gradient structure. Reproduced with permission[41]. Copyright 2022, Royal Society of Chemistry. Layered structure. Reproduced with permission[42]. Copyright 2023, American Chemical Society. Patterned structure. Reproduced with permission[43]. Copyright 2023, Wiley-VCH. Multifunctional applications (orange panel): Information encryption. Reproduced with permission[44]. Copyright 2022, Elsevier. Sensor, Reproduced with permission[45]. Copyright 2023, Elsevier. Gripper, Reproduced with permission[46]. Copyright 2019, Wiley-VCH. Mechanical arm. Reproduced with permission[32]. Copyright 2019, Springer Nature Publishing Group.
THE DEFORMATION MECHANISM OF HYDROGEL ACTUATORS BASED ON POLYMER MATRICES
Hydrogels are 3D polymeric networks composed of hydrophilic macromolecules and water. The polymer chains serve as the structural skeleton, critically determining gel functionality and application potential. For instance, hydrophilic polymer matrices confer exceptional water retention capacity, making them ideal for biomedical applications, whereas hydrophobic polymer scaffolds exhibit engineering-oriented properties. Consequently, designing stimuli-responsive hydrogel actuators requires careful consideration of the target application environment and relevant stimuli when selecting the polymer matrix. This section systematically examines deformation characteristics of hydrogel actuators constructed from polymer matrices with diverse properties [Figure 2 and Table 1].
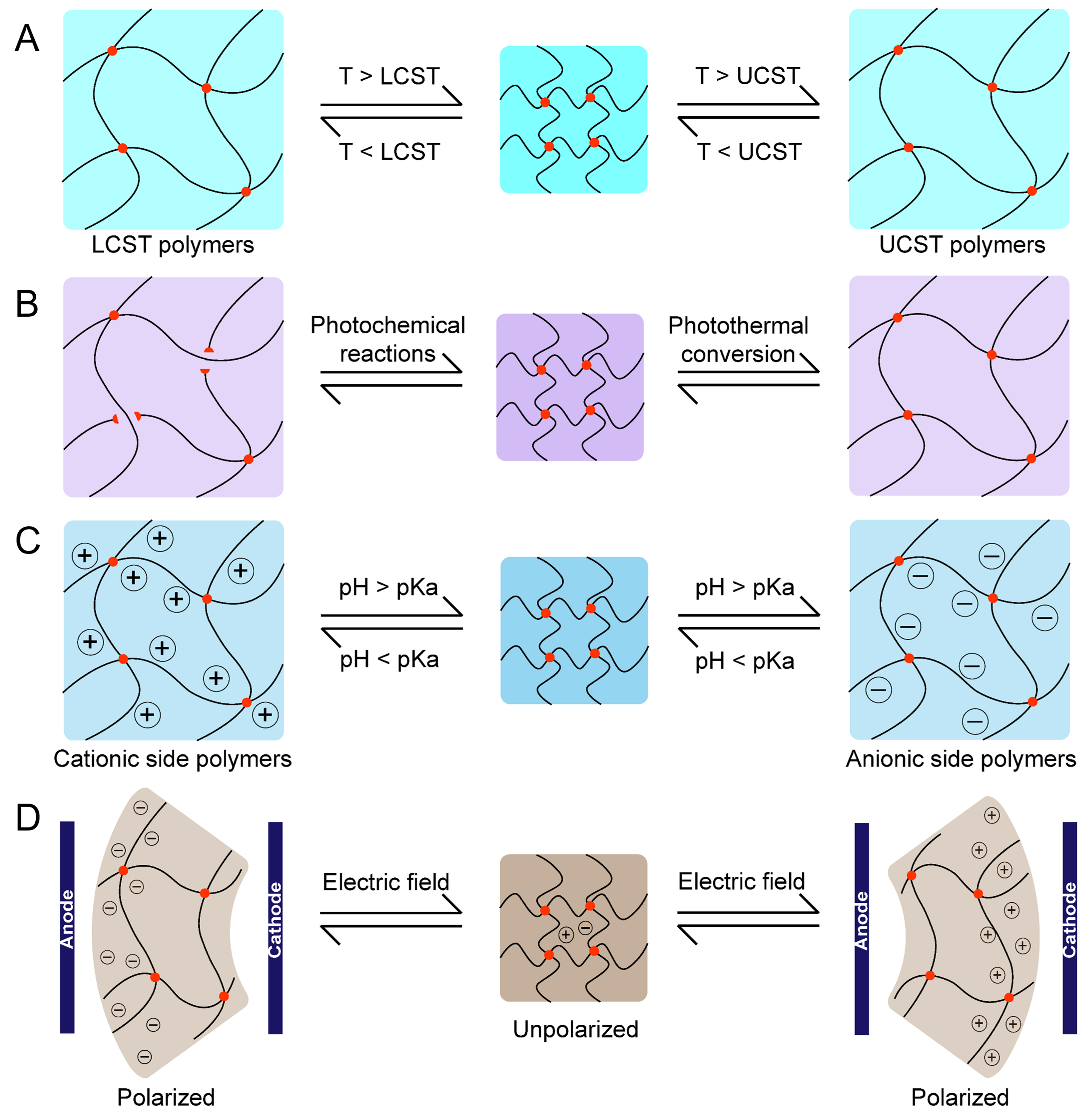
Figure 2. Schematic diagrams of the actuation mechanism of (A) temperature, (B) light, (C) pH, and (D) electric-responsive polymer-based hydrogels. Author-generated images.
Characteristics of hydrogel actuators constructed from different polymer matrices
| Stimulus types | Representative polymers | Advantages | Disadvantages | Primary applications |
| Temperature | LCST-type: PNIPAM, PDEAAm | Reversible, biocompatible | Low strength (< 10 kPa), slow response (several hours to days) | Drug delivery, tissue engineering, 4D printing |
| UCST-type: PNAGA, P(AAm-co-AN) | Low-temp actuation | Low strength, slow response (several hours to days) | Smart switches | |
| Light | Photoisomerizable: spiropyran, azobenzene | Non-contact, rapid response, precise | Requires specific wavelengths | Microfluidics, optical devices, soft robots |
| Photocleavable: nitrobenzyl | Controllable large deformation, rapid response | Irreversible, low strength | Single-use release systems | |
| Photodimerizable: coumarin, cinnamate | Reprogrammable, rapid response, large deformation, controllable strength | Efficiency depends on light intensity | 4D structures, reconfigurable devices | |
| Photothermal | Remote control, controllable strength and response | Low energy efficiency | Deep-tissue therapy, biomimetic robots | |
| pH | Cationic: CS, PDMAEMA | Biocompatible, large deformation | Sensitive to ionic interference, slow response | Acid-triggered drug delivery (e.g., stomach) |
| Anionic: PAAc, PMAAc | High swelling ratio, large deformation | Poor mechanical stability, slow response | Intestinal drug release, cell delivery | |
| Electricity | PPy, PANI, PAMPS | Fast response, high force output, and large deformation | Requires electrolytes, poor cycling stability | Artificial muscles, underwater robots, and biosensors |
| Humidity | PEG, PEGDA | Stimulus-free operation, controllable response and deformation | Environment-dependent, low strength | Crawling robots, environmental sensors |
| Ion | Zwitterionic polymers | Ion-specific response | Narrow applicability, small deformation | Biomedical devices, biomimetic systems |
Temperature sensitive polymer matrices
Temperature-sensitive polymer-based hydrogels are one of the most widely used and studied hydrogel actuators. Thermosensitive polymers are divided into two main classes: those with the lower critical solution temperature (LCST) and those with the upper critical solution temperature (UCST). When the external temperature changes and reaches the critical point of the temperature-sensitive polymer, the polymer chains will undergo a conformational change, so that the solvent is absorbed or expelled, macroscopically leading to the volume expansion or contraction of the hydrogel.
Poly(N-isopropylacrylamide) (PNIPAM) remains a cornerstone thermosensitive polymer for hydrogel actuators due to its reversible volume phase transition at the LCST (~32 °C)[11,47]. Below the LCST, amide groups form stable hydration layers with water molecules via intermolecular hydrogen bonds, maintaining PNIPAM chains in a hydrophilic coiled conformation. Above the LCST, disruption of these hydrogen bonds triggers intramolecular bonding while enhancing the hydrophobicity of the isopropyl group, forcing chains to collapse into hydrophobic globules. This mechanism enables applications such as thermoresponsive microneedles for controlled drug delivery[48]. However, traditional PNIPAM hydrogels suffer from inherent limitations, including weak mechanical properties (< 10 kPa) and slow deformation kinetics (10-7-10-6 cm2·s-1)[49]. To overcome these constraints, researchers employ two primary strategies: functional composites (incorporating SRBs or complementary polymers) and structural engineering. For example, Jiang et al. demonstrated this approach through a pH/temperature dual-responsive poly(acrylamide-acrylic acid-3-acrylamidophenylboronic acid)/PNIPAM [P(AAm-AAc-3-AAPBA)/PNIPAM] bilayer actuator achieving exceptional bending (1,420°) and rapid response [Figure 3A][50]. Li
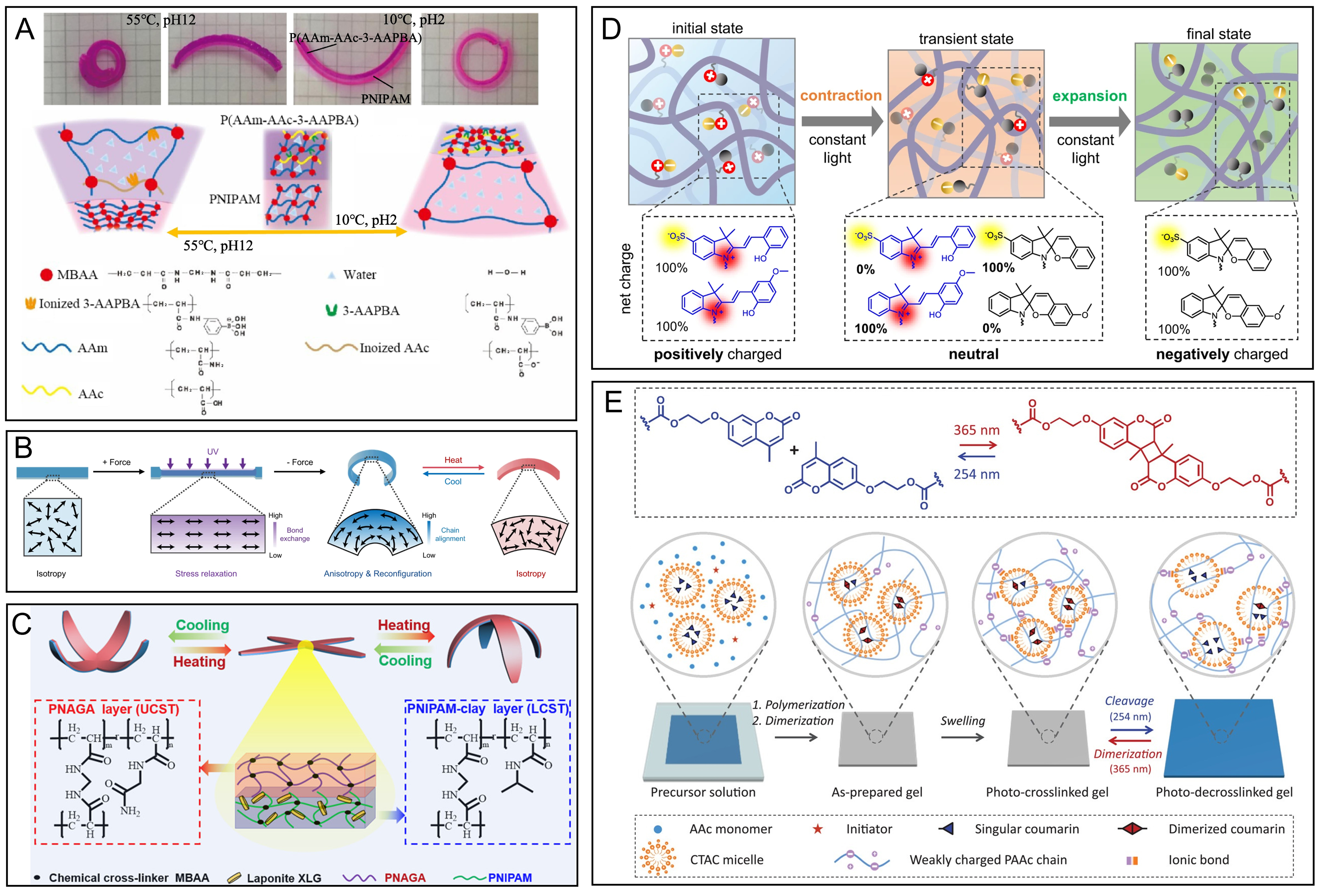
Figure 3. Hydrogel actuators based on thermosensitive and light-sensitive polymer matrices. (A) Schematic diagram of deformation of P(AAm-AAc-3-AAPBA)/PNIPAM bilayer hydrogel actuator. Reproduced with permission[50]. Copyright 2023, Elsevier; (B) Deformation and recovery mechanism of PNIPAM hydrogel actuator based on dynamic disulfide bond crosslinking. Reproduced with permission[52]. Copyright 2023, Springer Nature Publishing Group; (C) Bilayer hydrogel actuator prepared by UCST and LCST polymer matrix. Reproduced with permission[57]. Copyright 2020, American Chemical Society; (D) Light-responsive hydrogel actuators based on spirocyclic compounds. Reproduced with permission[60]. Copyright 2024, Springer Nature Publishing Group; (E) Reversible photodimerization/photocleavage of hydrogel actuator based on coumarin units. Reproduced with permission. Copyright 2021, Wiley-VCH[61]. P(AAm-AAc-3-AAPBA): Poly(acrylamide-acrylic acid-3-acrylamidophenylboronic acid); PNIPAM: poly(N-isopropylacrylamide); UCST: upper critical solution temperature; LCST: lower critical solution temperature.
Poly(N-acryloylglycinamide) (PNAGA), polyacrylamide/acrylonitrile copolymer [P(AAm-co-AN)], and Acrylamide-vinylphenyl triazine copolymer [P(AAm-co-VPhDT)] are typical UCST-type polymers[55]. The phase transition mechanism is opposite to that of LCST systems. Below UCST, intermolecular hydrogen bonding between hydrophilic groups promotes chain collapse, exposing hydrophobic domains. Above UCST, hydrogen bond dissociation enables hydrophilic group rehydration and chain extension. For example, bilayer structures with UCST-responsive polyacrylamide/polyacrylic acid (PAAm/PAAc) top layers and inert PAAm bottoms develop stress mismatches below UCST. Hydrogen bonding-induced contraction in the active layer drives deformation while the passive layer remains static[56]. Besides, combining LCST and UCST polymers creates complementary actuation systems. Li et al. engineered dual-responsive actuators with PNIPAM and PNAGA layers [Figure 3C][57]. The antagonistic thermal responses generated bidirectional bending with enhanced angular displacement and speed, demonstrating new design paradigms for programmable hydrogel actuators.
Light sensitive polymer matrices
Light-responsive polymers are a popular choice for constructing hydrogel actuators due to their remote controllability, rapid responsiveness, and non-contact operation. These polymers transduce optical signals into chemical or thermal energy through molecular-scale photochemical reactions (isomerization, cleavage, dimerization) or nanoscale photothermal conversion. This energy is subsequently amplified into rapid, reversible changes in polymer chain conformation, crosslinked networks, or macroscopic structures, enabling remote, contact-free, and high-precision photoresponsive actuation[58].
Based on their photoresponse mechanisms, light-sensitive polymers are categorized into four classes[59]: (i) Photoisomerizable polymers: These incorporate moieties such as azobenzene, spiropyran, or diarylethene in their main/side chains. Upon specific wavelength irradiation, reversible cis-trans isomerization or ring-opening/-closure reactions induce instantaneous alterations in chain conformation, polarity, or free volume. These changes drive macroscopic swelling/deswelling, bending, or surface wettability modulation. As demonstrated by Guo et al., Homogeneous hydrogels containing two spiropyrans with asynchronous photoisomerization exhibit self-regulated bidirectional bending and rolling locomotion under constant light via sequential charge reversal and volumetric contraction-expansion cycles [Figure 3D][60]; (ii) Photocleavable polymers: When integrated with photolabile groups (e.g., nitrobenzyl, acetal, or triphenylmethane) in backbone/crosslinking sites, irradiation triggers bond cleavage. This reduces crosslinking density and induces hydrogel swelling; (iii) Photodimerizable polymers: Moieties such as coumarin, cinnamate, or anthracene undergo cycloaddition reactions upon irradiation, causing network densification. Subsequent stimuli reverse dimerization via cycloreversion. Zhu et al. engineered reprogrammable hydrogel actuators using coumarin photodimerization (365 nm) and photocleavage
pH-sensitive polymer matrices
pH-responsive polymers feature ionizable side groups that undergo protonation/deprotonation in solution, altering charge distribution within hydrogels. Ionization induces electrostatic repulsion between similarly charged polymer chains, expanding the network and promoting hydrogel swelling through water absorption[17]. Based on ionization behavior, these polymers can be classified into cationic and anionic types. For cationic polymers [e.g., chitosan (CS) and poly (N, N-dimethylaminoethyl methacrylate) (PDMAEMA)], protonation below the dissociation constant (pKa) induces electrostatic repulsion-driven swelling. Deprotonation above pKa causes shrinkage. Anionic polymers [e.g., PAAc and polymethylacrylic acid (PMAAc)] exhibit inverse pH-responsive behavior[14,37].
Ion repulsion is the main mechanism of pH-responsive hydrogel actuators[17]. For example, amine protonation in acidic conditions generates cationic repulsion, enabling solvent influx and swelling. Carboxyl deprotonation in alkaline environments produces analogous effects. This is illustrated in Figure 4A, which shows a bilayer membrane [CS/carboxymethyl cellulose (CMC)] with bidirectional bending characteristics[62]. Based on this characteristic, pH-sensitive hydrogel actuators are commonly used in biomedicine. For example, Chen et al. used pH-responsive PDMAEMA hydrogels to design a microfluidic device for storing drugs[63]. The tertiary amine groups in PDMAEMA hydrogels protonate in acidic environments, generating electrostatic repulsion that expands the network. This deformation expels drugs from microfluidic reservoirs [Figure 4B]. Su et al. prepared pH-triggered deformable hydrogels using polymers PAAc and PMAAc containing pendant carboxylic molecular groups as the backbone of the hydrogels[64]. The pH-responsive hydrogel actuator was then assembled with a cell delivery system to enable the on-demand release of the cell delivery system at the targeted therapeutic site. Han et al. designed an implantable switching device based on the difference in the expansion ratio of PAAm and PAAc in different pH solutions[65]. The PAAm/PAAc bilayer actuators realized synergistic bending in acidic/basic environments, activating capsule switches for controlled drug release [Figure 4C]. Therefore, hydrogel actuators demonstrate exceptional potential as pH-responsive drug carriers due to their environmental sensitivity and biocompatibility. However, current limitations include susceptibility to environmental fluctuations and actuation control challenges. Future development requires strategic incorporation of SRBs to enhance operational robustness.
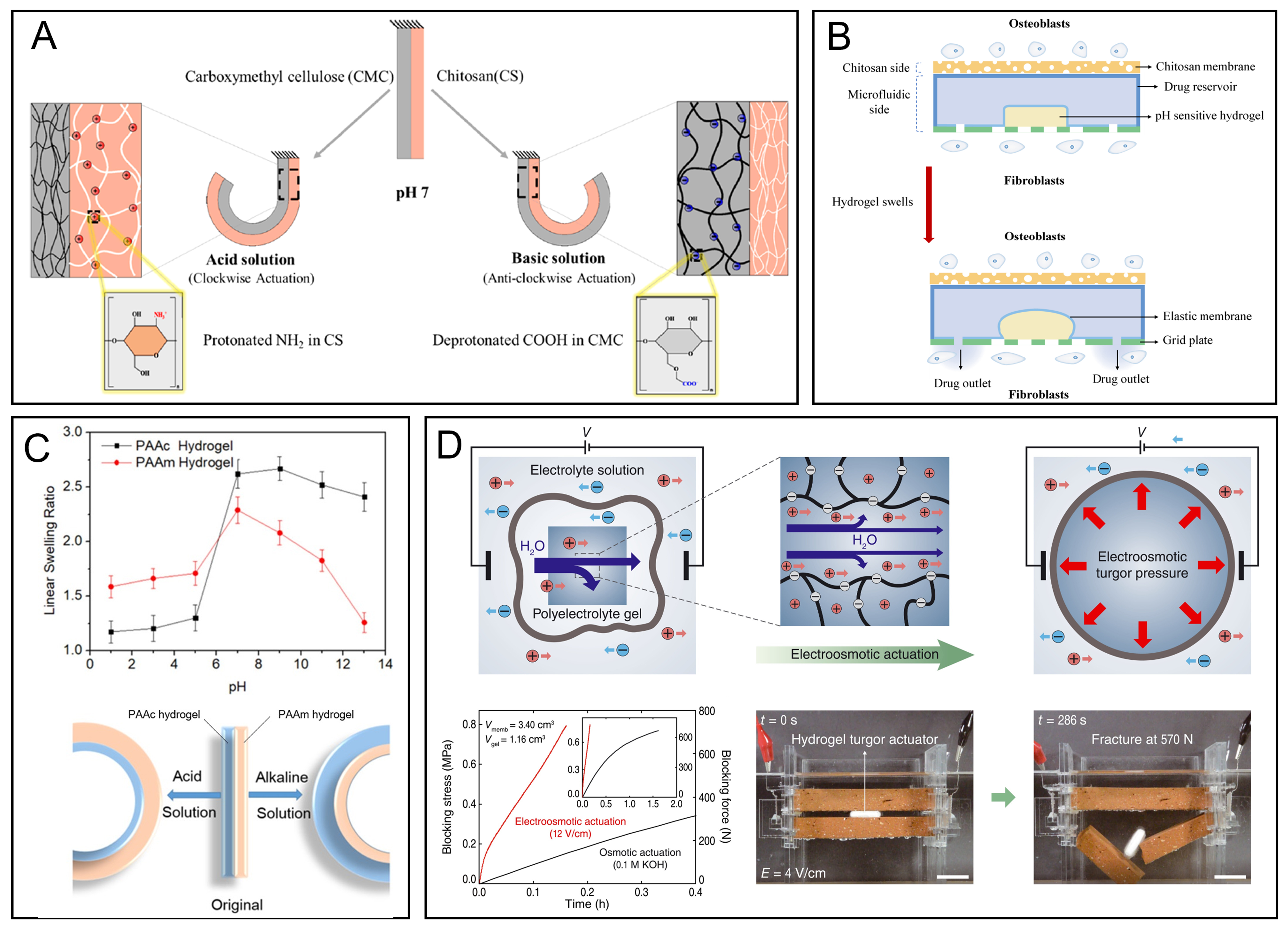
Figure 4. Hydrogel actuators based on pH-sensitive and electric-sensitive polymer matrices. (A) The bilayer hydrogel actuators based on cationic polymer matrices. Reproduced with permission[62]. Copyright 2022, American Chemical Society; (B) Microfluidic device based on pH-responsive hydrogel actuator. Reproduced with permission[63]. Copyright 2023, Molecular Diversity Preservation International; (C) The hydrogel actuator switch based on an anionic polymer matrix. Reproduced with permission[65]. Copyright 2020, American Chemical Society; (D) Hydrogel actuator based on electrically responsive polymer matrix. Reproduced with permission[70]. Copyright 2022, American Association for the Advancement of Science.
Electric responsive polymer matrices
Electroactive polymers are prominent materials for electrically stimulated actuators, converting electrical energy into mechanical work through shape/size changes. Actuators based on conductive polymers are often referred to as “artificial muscles” because of their muscle-like properties[66]. Therefore, hydrogels based on conducting polymers [e.g., polythiophene (PTh), polypyrrole (PPy)[67], polyaniline (PANI)[68], and poly (2-acrylamido-2-methylpropanesulfonic acid) (PAMPS)[69]] deform under applied solvent-induced or external electric fields, which can be used to make biosensors, artificial muscles, and intelligent soft robots. For example, Na et al. firstly prepared a polyelectrolyte hydrogel using potassium 3-sulphonatopropyl acrylate as a monomer, and then a permeable and hard membrane was constructed to construct a swollen hydrogel actuator[70]. Under electric fields in KOH electrolyte, rapid swelling generated stresses sufficient to fracture bricks within 5 min [Figure 4D], demonstrating potential for robust underwater construction. Additionally, the mechanical stability and application range of conducting polymer-based hydrogel actuators can be improved by network reinforcement. For example, Milani et al. designed PPy/PAAc interpenetrating networks where PPy oxidation under positive polarization induced electrolyte influx and swelling[67]. Danmatam et al. prepared CMC/PTh electroactive hydrogel that achieved ~52° cathode-directed bending due to the polarization of Na+, H+, and S+ in the polymers[71]. Therefore, conductive polymer-based hydrogel actuators show significant promise in biomedicine, biosensing, and energy storage applications. However, it is still necessary to improve the conductivity and actuation capability of electrically responsive hydrogel actuators through the addition of SRBs to expand the scope of their applications.
Other responsive polymer matrices
Beyond the aforementioned polymers, additional classes, including humidity- and ion-responsive variants, are employed in hydrogel actuators. The following case studies examine their characteristic deformation mechanisms.
Humidity response
Humidity-responsive hydrogel actuators offer exceptional operational simplicity, holding significant potential for diverse engineering applications[72]. Polyethylene glycol (PEG) polymers exhibit pronounced hygroscopicity due to abundant hydroxyl groups that facilitate hydrogen bonding with water molecules[73]. For instance, photopolymerized polyethylene glycol diacrylate (PEGDA) hydrogel films demonstrate humidity-driven locomotion: when positioned on moist substrates, differential water absorption between film surfaces induces asymmetric swelling, generating curling forces that propel flipping motions. Remarkably, cyclic humidity exposure enables programmed locomotion of these hydrogels on ratcheted surfaces, facilitating the development of unidirectional crawling robots[73].
Ion response
Salt-responsive hydrogel actuators exhibit volumetric contraction/expansion modulated by solution salinity. Typically composed of zwitterionic polymers, their responsiveness is tunable through salt type and concentration. Li et al. demonstrated this phenomenon in a hybrid gelatin/poly(2-hydroxyethyl methacrylate) (PHEMA) hydrogel, where synergistic phase separation and Hofmeister effects enabled ionic responsiveness[74]. This property, based on ionic-stimulus response, makes hydrogel actuators promising for a wide range of biomedical applications.
THE KEY SRBs IN HYDROGEL ACTUATORS
Despite exhibiting certain deformation capabilities and responding to various stimuli such as temperature, pH, electricity, humidity, and others, hydrogel actuators based on responsive polymers suffer from slow deformation speed, single deformation mode, poor mechanical performance, and limited environmental adaptability, restricting their application scope. To address this challenge, researchers have proposed incorporating additional SRBs such as carbon nanotubes (CNTs), gold nanoparticles (Au NPs), and MXenes. These SRBs are functional materials that respond to external stimuli; they not only enhance actuation performance but also improve the hydrogel networks. Integrating these SRBs with the hydrogel frameworks facilitates the construction of multi-stimulus-responsive smart hydrogels, representing an emerging strategy to achieve shape-programmable and multifunctional soft actuators. In this section, we provide a concise overview of the types of SRBs commonly employed in hydrogel actuators.
Carbon-based responsive building blocks
Carbon-based nanomaterials typically exhibit high mechanical strength, stability, low price, and excellent electrical/thermal conductivity, making them promising for multifunctional hydrogel actuators. CNTs represent the most prominent example. Meanwhile, vertically aligned CNT arrays could also achieve rapid improvements in response speed[75]. Owing to their superior conductivity, CNTs are commonly used in electro-responsive hydrogel actuators. For example, Pirahmadi et al. incorporated CNTs into a poly(vinyl alcohol) (PVA)/CS dual-network hydrogel[76]. CNTs addition increased the elastic modulus to 10 kPa, electrical conductivity to 9.93 mS·cm-1, and electrically induced bending angle to 71.05 ± 1°. The hydrogel also showed near-complete shape recovery under voltage, demonstrating potential for soft robotics, sensors, and actuators. However, the complex modification processes of CNTs have shifted research focus toward graphene. Compared to CNTs, graphene offers large specific surface area, high electrical/thermal conductivity, and excellent mechanical properties. Its derivatives [e.g., graphene oxide (GO) and reduced graphene oxide (rGO)] are also readily processable[77]. Graphene-based materials exhibit exceptional stimuli-responsive performance across chemical, mechanical, electrical, thermal, and optical aspects[78-81]. Specifically: (i) The surfaces can adsorb gas molecules, water molecules, biomolecules, and ions, thereby adjusting the distance between layers and causing a volumetric phase transition of expansion/contraction[78]; (ii) Applying an electric field to graphene and its derivative films not only causes the film to expand or contract due to the injection or extraction of charges but also causes graphene to undergo heating and contraction due to its electrical and thermal conductivity, achieving the conversion of electrical energy to thermal energy and then to mechanical energy; (iii) Graphene’s negative coefficient of thermal expansion (CTE) facilitates temperature-sensitive actuation; (iv) High near-infrared (NIR) photothermal conversion efficiency enables light-to-heat transformation[82]. Consequently, graphene materials are mostly used for photothermal-/electro-responsive actuators. For instance, GO-infiltrated PNIPAM hydrogel achieved biomimetic origami, paper box, human hand, and chrysanthemum deformations under NIR[83].
Metal-based responsive building blocks
Numerous studies demonstrate that incorporating metal-based nanomaterials into hydrogels yields composites with enhanced multifunctional responsiveness (such as light, electricity, heat, magnetism, and solvent), enabling the development of multi-stimulus responsive hydrogel actuators. Commonly integrated metal-based materials include photothermal/electrically conductive metal nanomaterials and metal-organic frameworks (MOFs)[84,85], magnetically responsive ferrosoferric oxide (Fe3O4)[86] and neodymium iron boron (NdFeB)[64] nanomaterials, solvent-responsive metal salt solutions[87-89], and color-changing rare earth ions[90]. For example, Kim et al. designed a hydrogel actuator that can lengthen and shorten significantly even in air due to the introduction of cofacially oriented unilamellar electrolyte titanate nanosheets (Ti NSs)[91]. Li et al. reported a light-powered in-air hydrogel actuator achieving high-speed jumping and rolling driven by photothermally generated bubbles from embedded Fe3O4 nanoparticles[92]. Yao et al. designed a hydrogel actuator with anisotropic laminar silver nanowires/sodium alginate (Ag NWs/SA) aerogel scaffold and the polymerizable precursor solution containing N-isopropylacrylamide (NIPAM) and CNTs, showing ultrafast anisotropic deformation to temperature/light/solvent stimulation[93]. Thus, metal-based SRBs-hydrogel composites show promise for advancing soft actuators due to their superior multi-stimuli responsiveness.
MXenes-based responsive building blocks
As an emerging two-dimensional (2D) nanomaterial, MXenes (such as Nb2CTx, Ti3C2Tx, and Mo2Ti2C3Tx) have garnered significant attention due to their ultrathin structure, large specific surface area, and mechanical robustness. Relying on their excellent structures and performances[94], such as high hydrophilicity and conductivity[95], efficient photothermal conversion efficiency, abundant surface functional groups (-OH, -F, and -O)[96-98], and tunable interlayer spacing, MXenes have been widely used as functional fillers[99], initiators[100], or crosslinking agents[101] for the preparation of hydrogels. Various MXenes-based actuators responsive to light, electricity, and humidity have been developed. For example, a light-responsive hydrogel actuator demonstrates remarkable multi-freedom rolling behavior in a water environment by incorporating modified MXenes into a PNIPAM-PAAm copolymer hydrogel[102]. Meanwhile, the conductivity of MXenes endows the hydrogel with certain sensing properties, which can be utilized as a self-sensing actuator for information encryption[103]. Yang et al. designed and fabricated a lamellar-structured composite actuator that consists of polydopamine-modified MXenes and bacterial cellulose nanofibers, which has high conductivity (2,848 S·cm-1), large deformation (176°), and high actuation force output (6.5 N·m-2) under humidity[104]. MXenes can also combine with other functional materials to produce superior performance due to their abundant functional groups. The heterostructure of MXenes and CNTs could promote the ion migration and storage, resulting in more efficient electrochemical actuation[105]. The PNIPAM hydrogel actuator could generate high conductivity and self-sensing function by encapsulating the liquid metal nanodroplets with the amino-functionalized MXenes[106].
Other responsive building blocks
Beyond these, diverse SRBs with modifiable sites and multifunctional properties[107,108], such as inorganic nanoparticles[109,110], bentonite nanosheets[111], and cellulose nanofibers[112], are equally crucial for the development and functionality of stimulus-responsive hydrogel actuators. These materials improve hydrogel functionality through mechanical reinforcement, photothermal effects, conductivity, and biocompatibility. Moreover, their structural specificity enables the design of ordered networks that boost actuation performance. As an example, Yang et al. fabricated semi-interpenetrating bilayer actuator by
It can be seen that by introducing SRBs, hydrogel actuators can acquire multi-stimulus responses, enhanced actuation efficiency, and multifunctionality [Table 2]. This is due to the covalent/non-covalent interactions between SRBs and the hydrogel polymer chains[114]: (1) Nanomaterials (e.g., CNTs, MXenes) act as multiscale crosslinking points, binding polymers through hydrogen bonds, van der Waals forces, or topological entanglements, thereby enhancing the hydrogel network and increasing the conductive pathways[115]; (2) The surface functional groups of SRBs can form reversible dynamic bonds (such as hydrogen bonds, host-guest interactions, and coordination bonds) with polymer chains, facilitating energy dissipation while endowing the hydrogel actuators with self-healing/recycling capabilities[116]; (3) The photothermal properties, electrical conductivity, and porous structures of SRBs provide mechanisms for energy conversion, ion transport, and electron migration, enhancing actuation efficiency and stimulus sensitivity of hydrogel actuators. These synergistic mechanisms optimize actuator performance and ensure long-term operational stability, supporting diverse application scenarios.
Comparison of the different SRBs
| SRBs | Representative materials | Advantages | Disadvantages | Functionality |
| Carbon-based | CNTs, GO, rGO | High mechanical strength, excellent electrical/thermal conductivity, large specific surface area, high photothermal conversion efficiency | Complex modification process, poor hydrophilicity | Multi-stimulus response (light/electric/thermal); conductive sensing functionality |
| Metal-based | Ag NWs, Fe3O4, MOFs | High mechanical strength, multi-stimulus response, and high structural designability | High cost, prone to oxidation, limited biocompatibility | Multi-stimulus response (light/electric/thermal/magnetic/solvent); conductive sensing function; color-changing function |
| MXenes-based | Ti3C2Tx, Nb2CTx | High electrical conductivity and photothermal conversion efficiency, abundant surface functional groups, tunable interlayer spacing, integrating light/electricity/humidity stimulation | Complex preparation process, poor environmental stability | Multi-stimulus response (light/electric/thermal/moisture); conductive sensing function |
THE DESIGN STRATEGIES FOR HYDROGEL ACTUATORS BASED ON SRBs
Although the potential applications of materials are primarily governed by their properties, their intrinsic characteristics remain fundamentally determined by structural configurations. Consequently, when incorporating SRBs into hydrogels, the objective is to enhance the inherent properties and actuation performance of hydrogel actuators while enabling multifunctionality. However, the primary actuation mechanism of stimuli-responsive hydrogel actuators originates from the asymmetric internal stresses generated by the structural mismatch[36,117-119]. Such mismatch is typically achieved through two strategies: (1) Construction of homogeneous hydrogels with spatially differential responsiveness, facilitated by patterning or asymmetric structures; (2) Construction of heterogeneous hydrogels with inhomogeneous network structures and crosslinking density. Therefore, the integration of SRBs must be synergistically coupled with tailored structural designs and processing methodologies to precisely control structural asymmetry, thereby optimizing actuation performance[120]. Based on comprehensive literature analysis, we have identified and summarized the following design strategies.
Microstructural design
The precise control of anisotropic structures in intelligent hydrogels constitutes a pivotal factor in fabricating hydrogel soft actuators. For heterogeneous hydrogels, when subjected to external stimuli, it results in various parts of the hydrogel network showing non-uniform expansion/contraction. This behavior stems from inherent crosslinking density gradients and network heterogeneity, which generate asymmetric stresses that drive deformation actuation. To engineer such anisotropy, researchers have developed microstructure-based design strategies, primarily including: gradient structures (e.g., spatial variations in crosslink density or composition)[108,119,121] and oriented assembly structures (e.g., aligned polymer chains or nanofillers)[91,107]. These approaches enable the rational construction of anisotropic hydrogel actuators with programmable deformation modes.
Oriented structures
Owing to the surface processability of carbon-based SRBs, they can be integrated with hydrogel components via physical or chemical interactions. The integration enables carbon-based SRBs to be more uniformly and orderly dispersed in the hydrogel network, thereby augmenting actuator performance. For example, Ying
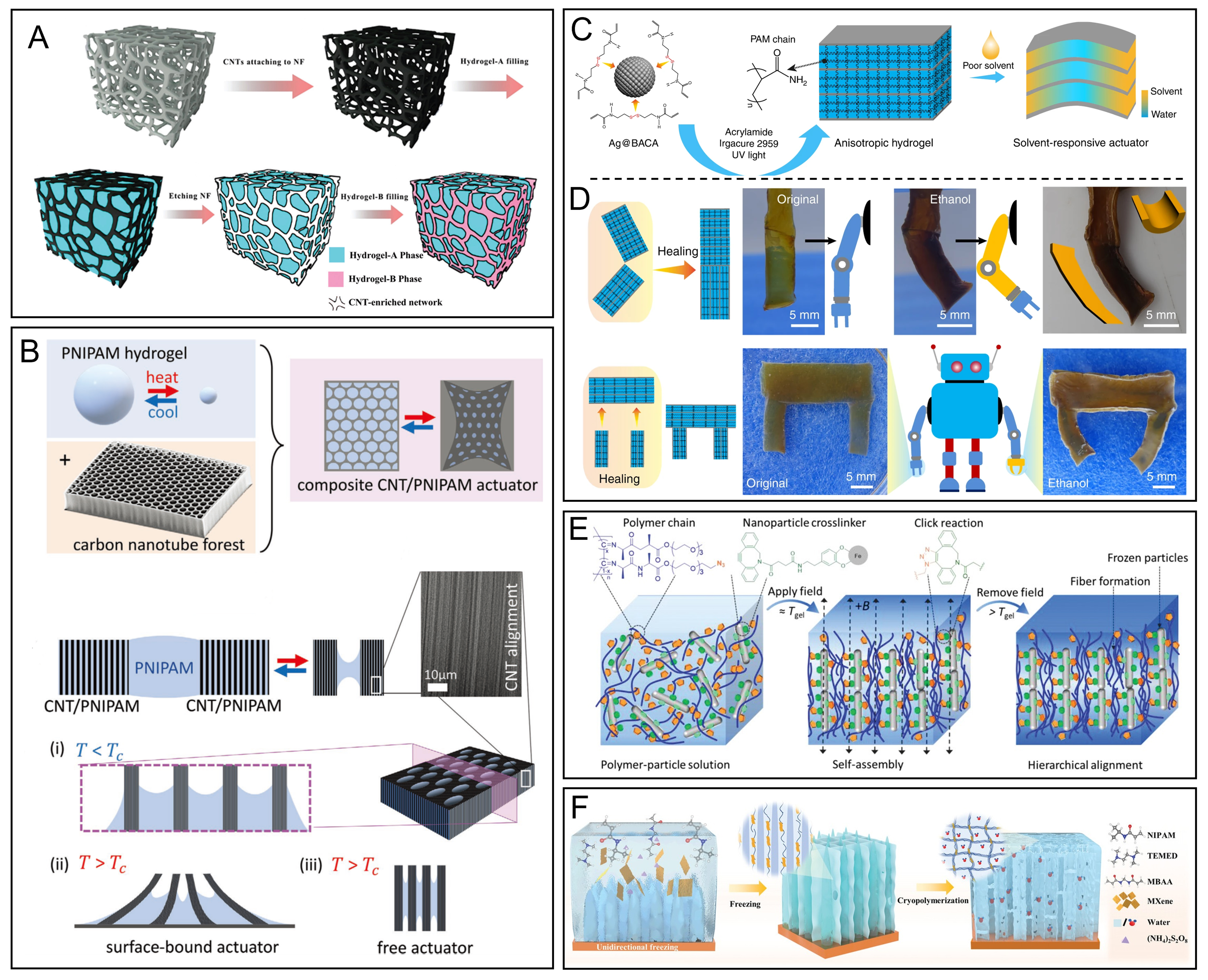
Figure 5. The anisotropic hydrogel actuators with oriented structures. (A) Schematic diagram of the two-physical-phase type 3D-connected conductive network enriched with CNTs. Reproduced with permission[122]. Copyright 2020, Royal Society of Chemistry; (B) Schematic of the preparation and deformation of CNT/PNIPAM composite hydrogel and the morphology of an exemplar CNT/PNIPAM actuator (i) below Tc of PNIPAM, (ii) above Tc while surface PNIPAM, and (iii) above Tc while free. Reproduced with permission[123]. Copyright 2022, Wiley-VCH; (C) Schematic diagram of the anisotropic hydrogel based on Ag NPs preparation process; (D) Schematic diagram and driving demonstration of robot hand assembled by different directions of hydrogel through healing effect. Reproduced with permission[32]. Copyright 2019, Springer Nature Publishing Group; (E) Schematic diagram of the preparation of anisotropic hydrogel composites driven by magnetic nanoparticles. Reproduced with permission[124]. Copyright 2022, Wiley-VCH; (F) Schematic of the synthesis process of PMD hydrogel. Reproduced with permission[40]. Copyright 2023, Wiley-VCH. 3D: Three-dimensional; CNTs: carbon nanotubes; PNIPAM: poly(N-isopropylacrylamide); Ag NPs: silver nanoparticles; PMD: PNIPAM/MXene directional.
Metal-based SRBs and their surface functional groups exhibit inherent binding capabilities for physical/chemical interactions with other compounds. Therefore, the assembly of metal-based SRBs into hydrogel networks via covalent/non-covalent bonding is expected to prepare anisotropic hydrogel actuators[91]. A representative demonstration by Qin et al. employed thiol-functionalized ligands coordinated with silver nanoparticles (Ag NPs) to form highly branched crosslinkers, which were subsequently incorporated into anisotropic nanocomposite hydrogels through free-radical polymerization[32]. This design conferred two critical advantages: Structural ordering (Ag NPs induced a highly ordered lamellar structure within the gel network, significantly improving mechanical properties) and dynamic functionality [RS-Ag coordination bonds acted as reversible healing motifs, while the intrinsic photothermal properties of Ag NPs enable rapid multi-stimuli (NIR/pH) triggered self-healing]. At the same time, the oriented lamellar assembly structure makes the gel exhibit a structure-dependent controllable actuation performance in polar organic solvents. When the gel sheet, composed of a large number of layers perpendicular to the surface, was placed in ethanol, the in-plane bending was observed. The gel sheet generated out-of-plane bending when a large number of layers were parallel to the surface. Furthermore, self-healing facilitated the assembly of modular hydrogel units into soft robots capable of complex actuation behaviors [Figure 5C and D].
In addition to building an anisotropic structure through chemical action, the orientation structures of the internal network in hydrogels can also be achieved with the help of external forces. For example, Chen et al. constructed anisotropic nanocomposite hydrogels by introducing magnetic nanomaterials [iron nanoparticles/nanorods/nanowires (Fe NPs, Fe NRs, and Fe NWs)] as crosslinkers in semi-flexible fiber hydrogels[124]. In the presence of an applied magnetic field, the magnetic materials formed an oriented arrangement parallel to the magnetic field. Meanwhile, the Fe NPs were aligned perpendicular to the magnetic field due to the electronegativity, resulting in a composite hydrogel material with a highly anisotropic structure [Figure 5E]. Yan et al. designed an anisotropic photoresponsive conductive hydrogel using the directional freezing method[40]. The prepared Ti3C2Tx MXene monolayer nanosheets were first mixed with NIPAM monomer, N, N’-methylene diacrylamide (MBA) crosslinker, and potassium persulfate (APS) initiator to prepare the gel precursor solution. Directional freezing in liquid nitrogen induced ice-templated polymerization. Finally, when the ice crystals melt, the composite PNIPAM/MXene directional (PMD) hydrogel with ordered orientation and filled with water could be obtained. This ordered-oriented channel structure enabled fast response performance and excellent driving strength, which can achieve 70% volumetric swelling and lift objects 40 times larger than its weight in 2 s under light [Figure 5F]. Compared with isotropic hydrogels, this anisotropic design of the internal network greatly improves the actuating speed and strength of hydrogels and has great application potential in intelligent soft actuators.
Gradient structures
Gradient-structured asymmetric hydrogel actuators can be engineered by inducing spatial heterogeneity of building blocks within the hydrogel network. Established fabrication strategies include gravity deposition[125], external fields induction (light[126], electricity[127,128], magnetism[129]), permeation[83], and shear force[130]. This structural asymmetry enables rapid actuation through differential swelling/contraction gradients.
Gravity deposition is the phenomenon of the natural sinking of functional fillers under the influence of gravity during the polymerization process. For example, Liu et al. fabricated a temperature-responsive gradient hydrogel by incorporating silver nanosheets (Ag NSs) into PNIPAM networks[41]. During the polymerization process, the slow sinking of Ag NSs created a concentration gradient along the vertical axis, realizing both resistance and bending response under the stimulation of temperature [Figure 6A]. In addition, more complex gradient structures can be engineered by leveraging material properties and polymerization dynamics. Chen et al. prepared a dual-gradient hydrogel actuator by introducing inorganic particles (IPs) [boron nitride (BN), silicon nitride (Si3N4), aluminum nitride (AlN)] into the NIPAM matrix[131]. During the photopolymerization process, BN exhibited a gradient distribution in the direction of UV light irradiation, enabling crosslinking heterogeneity of PNIPAM chains [Figure 6B]. The dual anisotropy and high thermal conductivity enabled the hydrogel to achieve bending deformation from 0° to 720° within 8 s.
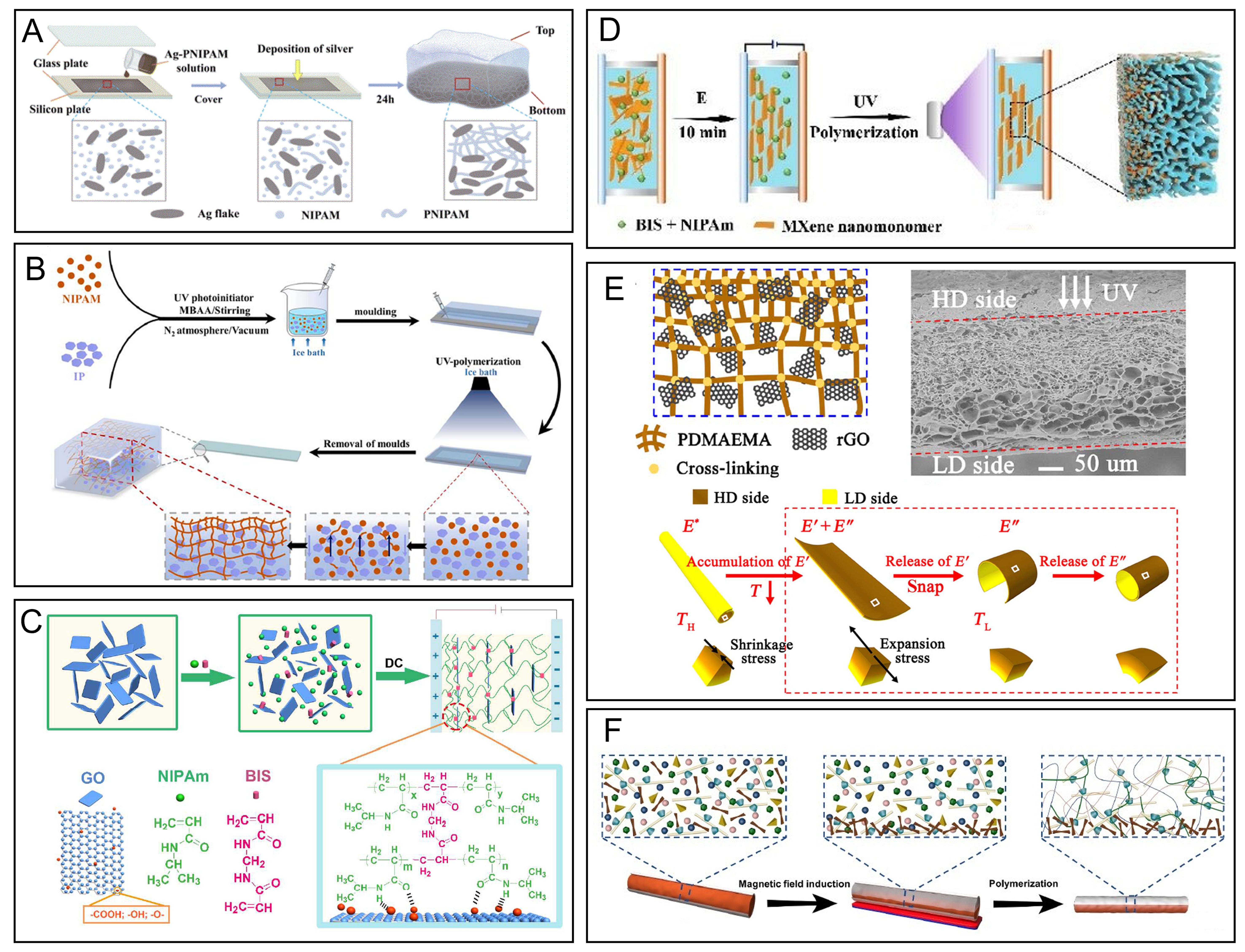
Figure 6. The anisotropic hydrogel actuators with gradient structures. (A) Schematic representation of the synthesis of Ag-PNIPAM hydrogels induced by gravity deposition. Reproduced with permission[41]. Copyright 2022, Royal Society of Chemistry; (B) Schematic representation of UV-induced polymerization of IPs-containing PNIPAM hydrogel structures. Reproduced with permission[131]. Copyright 2021, Elsevier; (C) Scheme of preparation of PNIPAM/GO gradient hydrogel. Reproduced with permission[132]. Copyright 2018, American Chemical Society; (D) Schematic diagram of the preparation of MXene-containing gradient hydrogel actuator using the electric drive. Reproduced with permission[134]. Copyright 2021, Wiley-VCH; (E) Schematic diagram and SEM cross-section diagram of the double gradient structure of the rGO/PDMAEMA hydrogel sheet and the reverse snapping deformation of the composite hydrogel sheet when moving from TH to TL. Reproduced with permission[121]. Copyright 2019, American Association for the Advancement of Science; (F) Schematic illustration of gradient hydrogel actuator prepared by magnetic field induction. Reproduced with permission[129]. Copyright 2023, Elsevier. PNIPAM: Poly(N-isopropylacrylamide); UV: ultraviolet; IPs: inorganic particles; GO: graphene oxide; SEM: scanning electron microscopy; rGO: reduced graphene oxide; PDMAEMA: poly (N, N-dimethylaminoethyl methacrylate).
External field induction exploits SRBs to form directional gradient structures. For instance, Yang et al. drove negatively charged GO toward the anode by applying a direct current (DC) electric field during PNIPAM polymerization, achieving a gradient network structure of GO-rich phase on the anode side [Figure 6C]. Under NIR irradiation, the anode side resulted in a faster increase in the temperature, causing the hydrogel strip to bend towards the anode side. As the illumination time increased, its bending response speed accelerated[132]. Zhu et al. prepared a complex gradient hydrogel by utilizing the conductivity of melt-synthesized crystals of sodium fluorohectorite nanosheets ([Na0.5]inter[Li0.5Mg2.5]oct[Si4]teterO10F2 NSs)[133]. The patterned conductive indium oxide (ITO) electrodes generated complex and controllable electric fields to organize charged NSs in PNIPAM hydrogel. The pattern of electrodes dictated penetrated thickness or in-plane gradients, developing different gradient-structured hydrogels with programmable deformations under external stimulation. The shape-programmable gradient hydrogel actuator could be designed through the negative electronegativity of 3-(trimethoxysilyl)propyl methacrylate (TMSPMA)-grafted MXene[134]. TMSPMA-grafted MXene formed concentration gradients under DC fields due to the migration toward the anode. More excitingly, combining graphical electric fields with mask-assisted photopolymerization achieved complex shape programming [Figure 6D]. The controllability and security of light make it ideal for gradient induction. Fan et al. designed a dual-gradient hydrogel actuator through UV-activated GO-induced polymerization[121]. The light irradiation side caused GO to produce high concentrations of free radicals, leading to high-density crosslinking reactions. While the backlight side was a low-density crosslinked network [Figure 6E]. When the ambient temperature increased, the hydrogel underwent curling deformation towards the high-density crosslinked side (HD), and then exhibited a reverse snapping phenomenon with decreasing ambient temperature. Adjusting the initial shape could control the curling configuration of the hydrogel, thereby controlling the subsequent reverse snapping mode of the hydrogel. Besides, magnetic fields are also a means of inducing external fields. Zhai et al. constructed a magnetic field-induced asymmetric hydrogel actuator based on Fe3O4[129]. Importantly, the programmable deformation could be realized by changing the position of magnets during the preparation process [Figure 6F].
It is also possible to construct gradient hydrogels by diffusing SRBs into the polymer network using solution diffusion. For example, He et al. added Fe3+ to quaternary ammonium chitosan-poly (acrylamide-co-1-vinylimidazole) [p(AAm-co-VI)/QCS] double network hydrogel by the immersion method[135]. The introduction of Fe3+ not only improved the mechanical strength and electrical conductivity but also made the hydrogels antifreezing capable and accelerated thermoresponse. Lin et al. introduced Zr4+ into tunicate cellulose nanocrystals-poly (N-isopropylacrylamide-co-3-sulfopropyl methacrylate potassium) [p(NIPAM-co-SPA)/TCNC] hydrogel[136]. Relying on the difference in crosslinking density of the gel network induced by Zr4+/SO3- coordination, the hydrogel achieved rapid bending.
Macro-pattern assembly
In addition to orientation/gradient engineering, macroscopic anisotropy can also be achieved through externally imposed asymmetric structures, including layered structures[137,138], patterned structures[139,140], and module assembly[141]. Similarly, isotropic hydrogels can also be transformed into anisotropic hydrogels through the assembly of layered and patterned structures.
Layered structures
Bilayer hydrogel actuators effectively utilize the superior performance of two layers, enabling functional complementarity and collaborative operation. This results in a robust combination of multi-stimulus responsiveness and reversibility, characterized by fast response times and high strength. These features have been extensively reported by researchers. Cheng et al. prepared a photothermal responsive GO-PNIPAM hydrogel layer, and then prepared poly (N, N-dimethylacrylamide) (PDMAA) hydrogel layer by free radical polymerization[142]. When NIR irradiation was given, the bilayer hydrogel folded towards the responsive layer, thus simulating a photo-controlled valve [Figure 7A]. Wei et al. prepared a two-layer hydrogel actuator with optical, electrical, and magnetic responses {Active layer: Fe3O4/co-poly(isopropylacrylamide-4-benzoylphenyl acrylate) [Fe3O4/p(NIPAM-ABP)]; Passive layer: isotropic conductive adhesives (ICAs)}. The addition of Fe3O4 not only improved the mechanical properties but also provided a remote optical and magnetic response. On the one hand, the bending direction of the hydrogel actuator could be changed by adjusting the direction of the applied magnetic field. On the other hand, the applied magnetic field could also guide the direction of movement of the hydrogel actuator, achieving precise navigation [Figure 7B][143]. The stimuli-responsive hydrogel (TN) with excellent photothermal properties and decent conductivity was prepared by introducing MXene to the PNIPAM hydrogel matrix. The NC hydrogel was prepared with the same method but without MXene. Then, the anisotropic bilayer hydrogel actuator, fabricated by a two-step polymerization, exhibited quick and controllable deformation behavior under NIR irradiation and could be assembled as a sensitive strain sensor to detect human motions in real time [Figure 7C][144]. Li et al. designed a light-controlled flexible bilayer hydrogel actuator [Active layer: PNIPAM hydrogel with vulcanized layered double hydroxide (VLDHs) nanosheets; Passive layer: PAAm hydrogel], reaching a bending angle of 360° after 70 s of irradiation due to the photothermal effect [Figure 7D][42].
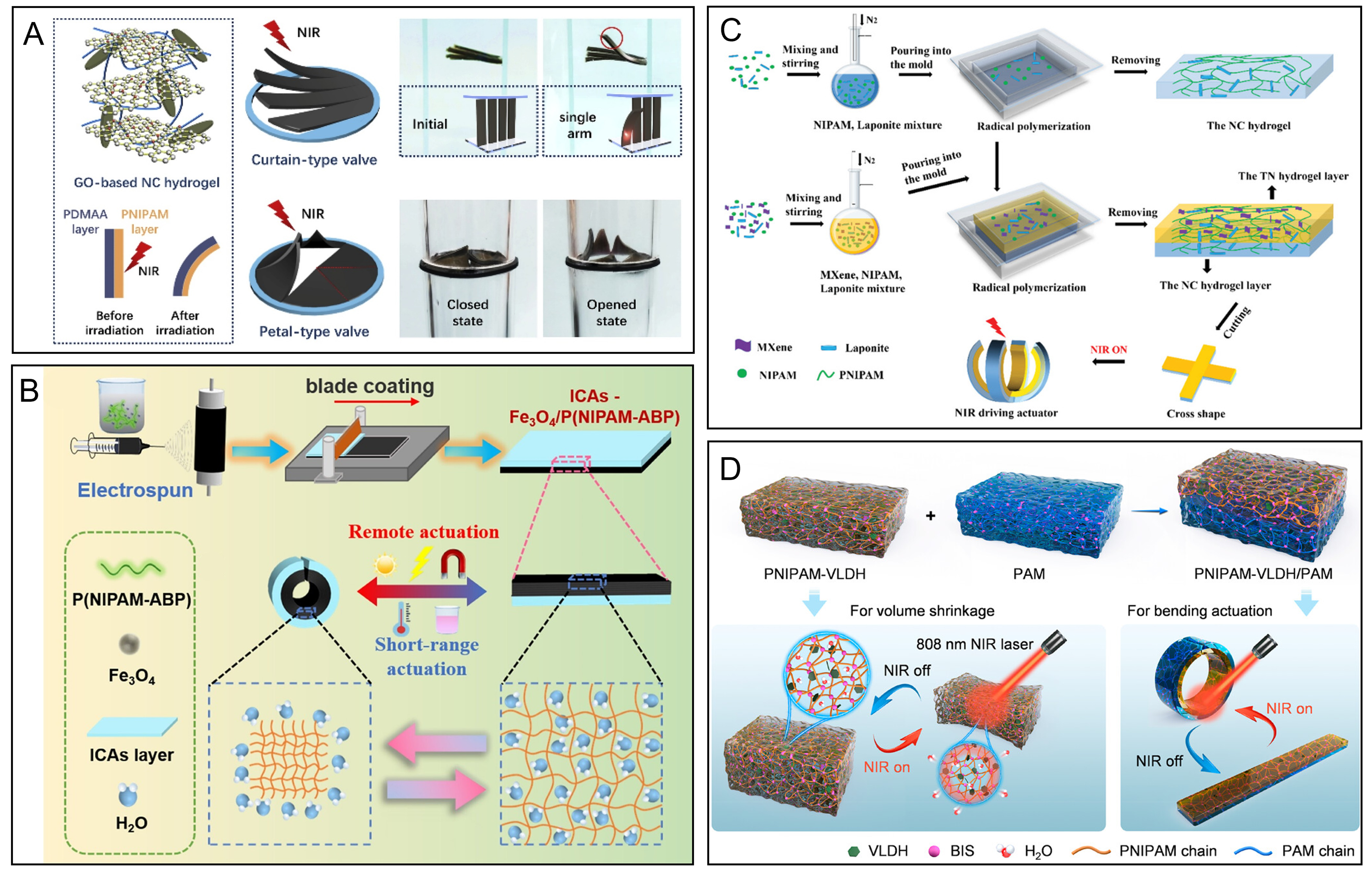
Figure 7. The anisotropic hydrogel actuators with bilayer structures. (A) Schematic representation of photothermally responsive and self-healing bilayer nanocomposite hydrogels. The bilayer nanocomposite hydrogel can be used as a flow valve. Reproduced with permission[142]. Copyright 2019, Elsevier; (B) The preparation technology and deformation mechanism of ICAs-Fe3O4/p(NIPAM-ABP) hydrogel actuator. Reproduced with permission[143]. Copyright 2023, American Chemical Society; (C) Preparation process of the TN/NC bilayer hydrogel actuator. Reproduced with permission[144]. Copyright 2021, Wiley-VCH; (D) Schematic diagram of NIR-actuated bilayer PNIPAM-VLDH/PAAm hydrogels. Reproduced with permission[42]. Copyright 2023, American Chemical Society. ICAs: Isotropic conductive adhesives; p(NIPAM-ABP): co-poly(isopropylacrylamide-4-benzoylphenyl acrylate); NIR: near-infrared; PNIPAM: poly(N-isopropylacrylamide); VLDH: vulcanized layered double hydroxide; PAAm: polyacrylamide.
However, due to the lack of interfacial forces, bilayer hydrogel actuators often experience delamination at the layer interfaces. The preparation strategy proposed by Wang et al., which involves gradual growth from the inside out, effectively addresses this issue. In simple terms, the first layer of hydrogel was prepared through a polymerization reaction, followed by the incorporation of an initiator into the first layer of hydrogel via immersion. Subsequently, the pre-gel solution for the second layer of hydrogel was brought into contact with the first layer containing the encapsulated initiator with the aid of a mold. Under external stimulation, the initiator encapsulated in the first layer triggered the polymerization of the second layer of hydrogel, resulting in the formation of a bilayer hydrogel[145].
Patterned structures
Although the layered structures enable the 2D deformation of hydrogel actuators, achieving 3D deformations remains challenging. Localized patterning offers a solution for programmable intelligent soft actuators. For instance, Zhang et al. prepared a NIR-driven hydrogel actuator by in situ photo-polymerization of PNIPAM hydrogel loaded with MOFs on the surface of the poly(dimethylsiloxane) (PDMS) thin film[146]. The hydrogel actuator could be shape-programmable and had different shape-morphing modes by adjusting the shape of the PDMS thin film [Figure 8A]. Xue et al. designed a conductive hydrogel through introducing 3-(methacryloyloxy) propyl trimethoxysilane (KH-570) surface-functionalized MXene/poly(3,4-ethylenedioxythiophene)/poly(styrenesulfonate) ink (K-MXene/PEDOT: PSS) into the PNIPAM polymer[43]. The laser-striped silicon dioxide/thermoplastic polyurethanes (SiO2/TPU) polymer film was then adhered to the surface of the hydrogel. The torsional shape deformation (SD) of the conductive hydrogel in different directions could be achieved by different stripe patterns [Figure 8B]. Essentially, the patterned structures are a special kind of bilayer structure. Significantly, the irregularly patterned structures can construct walking-type soft robots. For instance, Li et al. designed a hydrogel walking soft actuator by using PNIPAM hydrogel as the base layer and then adding GO-PNIPAM hydrogel patterned layers of different sizes at different parts. Under UV light irradiation, the GO-PNIPAM patterned gel underwent selective heating and contraction while the pure PNIPAM gel did not respond, resulting in the middle part of the actuator collapsing upward while the ends were supported on the ground. When the light was turned off, the actuator returned to its original state, achieving crawling behavior mimicking the inchworm [Figure 8C][147].
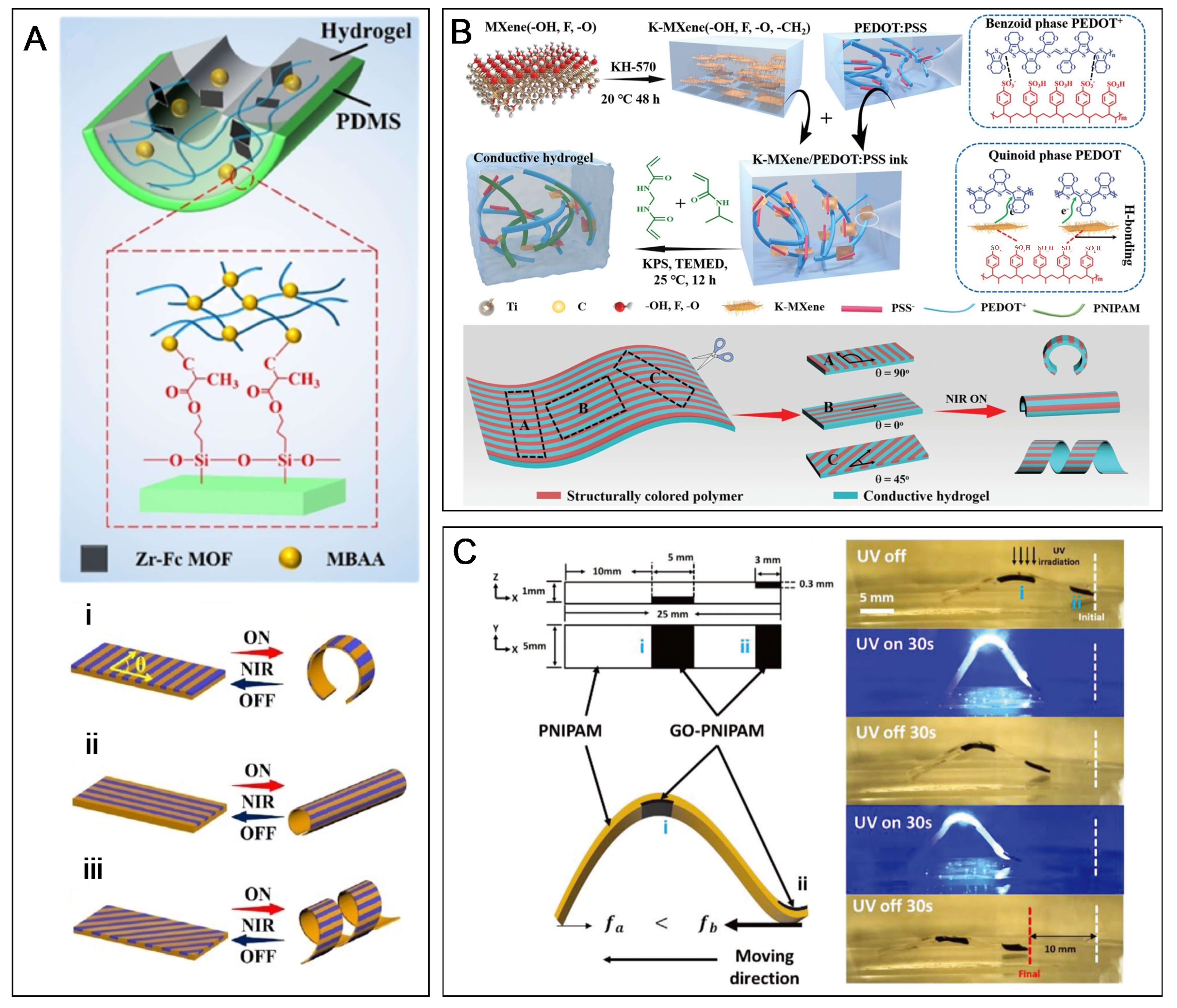
Figure 8. The anisotropic hydrogel actuators with patterned structures. (A) Fabrication and shape-programmable patterns of MOF-containing hydrogel actuator. Reproduced with permission[146]. Copyright 2022, American Chemical Society; (B) Schematic diagram of the synthesis and shape-editable process for the photoreceptor-sensitive hydrogel actuator. Reproduced with permission[43]. Copyright 2023, Wiley-VCH; (C) The schematic diagram and movement process of the soft walking actuator. Reproduced with permission[147]. Copyright 2023, Wiley-VCH. MOF: Metal-organic framework.
Processing technologies
The aforementioned studies primarily achieve shape transformation through material composition modification and asymmetric structural engineering of hydrogels. The same material composition can also be assembled in space using particular procedures or techniques, which causes the gel to deform in a predetermined way. Building spatial heterostructures is a crucial step in the programmed deformation of hydrogels, and this can be done using a variety of cutting-edge technologies, including ion printing[148], 3D printing[149,150], electrospinning[151], and lithography[152].
3D printing
3D printing enables material programming through layer-by-layer deposition based on computer-aided design models. The integration of stimulus-responsive capabilities into 3D-printed structures, termed “4D printing”, introduces a temporal dimension, yielding spatiotemporally controllable smart materials that autonomously transform under external stimuli[153]. This approach has become pivotal for fabricating hydrogel actuators with controlled and complex deformations. The most basic example is that Basu et al. designed a 3D-printed hydrogel composite material using catalytic activation polymerization[149]. By directly extruding crosslinkable hydrogel ink into a catalyst-laden carrier bath, initiated radical polymerization, thereby avoiding the photopolymerization limitation of opaque hydrogels. This breakthrough permits high-loading incorporation of opaque building blocks [such as GO and multi-walled CNTs (MWCNTs)], where increased black material concentration directly enhances actuation performance.
Alternatively, 3D printing technology enables gradient hydrogel fabrication through designing different polymerization times and thicknesses for each layer in advance. The unevenly polymer chains in the hydrogel result in different crosslinking densities on the upper and lower surfaces[44]. For example, Zuo et al. made a new gradient hydrogel actuator via the light-activated 3D printing process. Due to the bottom being the first layer of printing and being exposed to light for the longest time, the crosslinking density at the bottom was higher than that of the top, resulting in bending of the hydrogel under stimulation. Meanwhile, incorporating rare earth ions added fluorescence color change during bending, enabling information encryption applications [Figure 9A and B][44]. Beyond gradients, nanomaterials-orientation programming dictates mechanical anisotropy. For example, Gladman et al. prepared hydrogel ink utilizing shear-induced alignment of nanofibrillar cellulose (NFC) within PAAm matrix[154]. During the printing process, the squeezing of the nozzle induced shear alignment of the NFC, resulting in anisotropic stiffness of the printed filaments. The printing path determined the local orientation of cellulose fibers, achieving complex folded flower structures and 3D morphologies while immersed in water [Figure 9C].
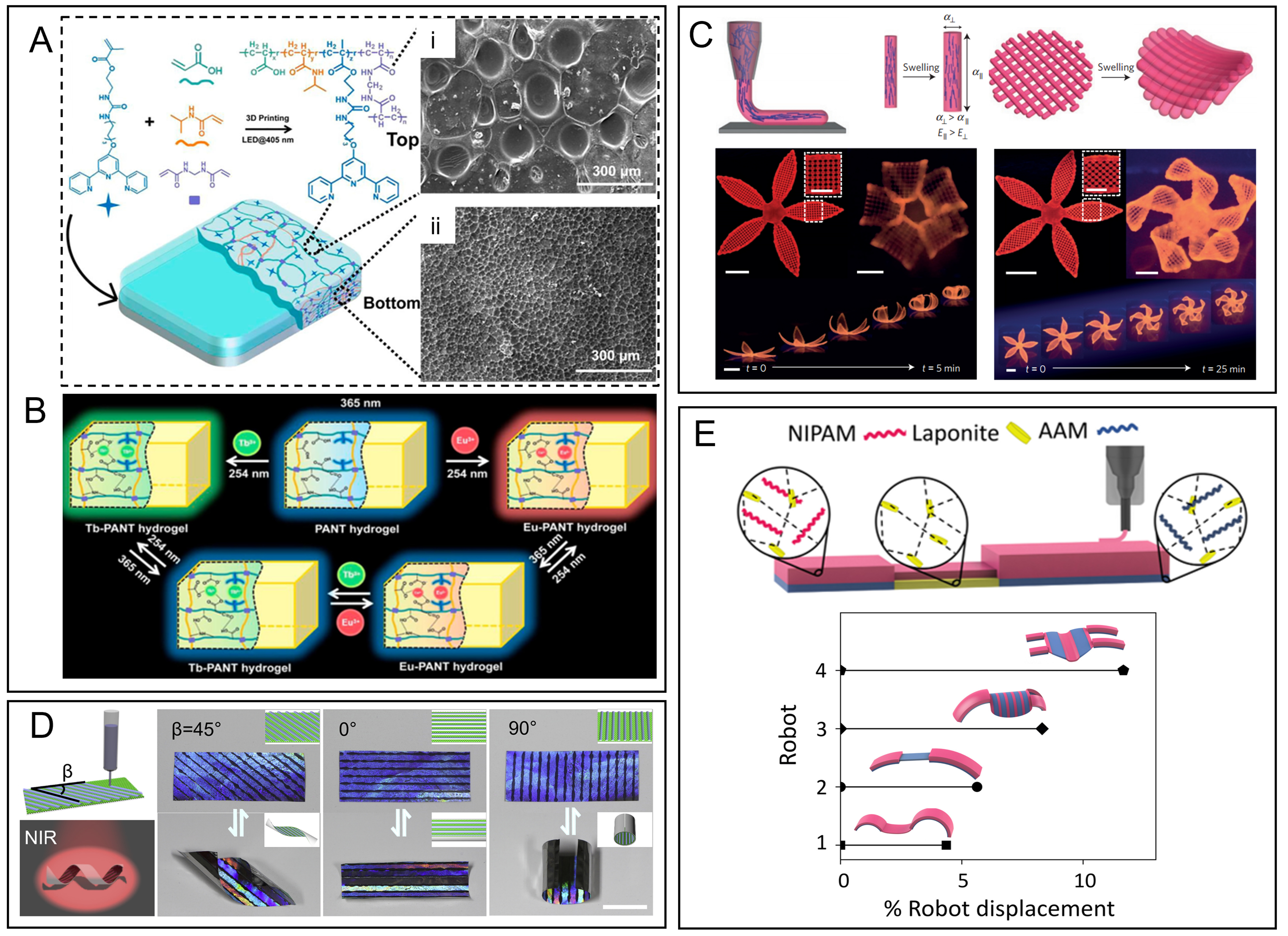
Figure 9. The anisotropic hydrogel actuator prepared by 3D printing. (A) Schematic of a 3D printed gradient-structured hydrogel and SEM images of its upper and lower surfaces; (B) Luminescent properties of this hydrogel. Reproduced with permission[44]. Copyright 2022, Elsevier; (C) Schematic diagram of the shear arrangement of cellulose fibers during the 3D printing process and the deformation process of folded flowers with different printing paths. Reproduced with permission[154]. Copyright 2016, Springer Nature Publishing Group; (D) The programmable deformation guided by printing technology. Reproduced with permission[155]. Copyright 2022, Elsevier; (E) Schematic diagram of a 3D printed gel robot and the experimental displacements of the robots over three thermal stimulation cycles. Reproduced with permission[159]. Copyright 2022, American Association for the Advancement of Science. 3D: Three-dimensional; SEM: scanning electron microscopy.
In addition, 3D printing can also be utilized for macroscopic asymmetric designs. For instance, Li et al. fabricated a designable and programmable self-feedback photonic crystal (PhC) intelligent actuator by patterning MXene-doped poly(diallyldimethylammonium chloride) (pDADMAC) hydrogel, exhibiting different driving behaviors and real-time structural color feedback [Figure 9D][155]. Until now, MXene-based hydrogels prepared by 3D printing technology have been reported as sensors[156], capacitors[157], and biomedical devices[158]. Meanwhile, 3D printing technology can enable MXene families for advanced anisotropic actuators with complex and precise structures[157]. What is more interesting is that intelligent soft robots can be further designed through printing technology. The Gracias group[159] further designed unidirectional crawling robots via 3D-printed bilayer segments (passive layer: PAAm gel ink; active layer: PNIPAM-laponite gel ink). The enhanced porosity enabled rapid thermal bending, and the asymmetric contact forces generated by strategically sized connectors achieved one-way movement. Remarkably, the movement of the robot could be adjusted through the stripe patterning of the connection section, highlighting the transformative potential of printed hydrogel robotics [Figure 9E].
Photolithography
Photolithography, classified as mask and maskless, provides superior spatial control capability for hydrogel patterning. Multi-step photolithography enables the fabrication of sophisticated heterogeneous structures with in-plane/through-thickness gradients and multi-responsive components, enabling complex deformation and even stepwise shape transformations. Ma et al. formed patterned rGO-PNIPAM regions in GO-PNIPAM hydrogel through mask-directed UV light reduction. When irradiated by a laser (650 nm), the rGO-PNIPAM regions localized heating caused the hydrogel to fold from 1D to 2D. The NIR-induced differential shrinkage between rGO and GO further realized deformation from 2D to 3D. By introducing a poly (methacrylic acid) (PMAA) network with pH/IS (ionic strength) response in the unreduced portion to form the GO-(PNIPAM-PMAA) regions, 3D-to-3D deformations achieved. This hierarchical design achieved multi-stimuli actuation (light/temperature/pH/IS) with programmable multi-step deformation modes [Figure 10A][160]. Moreover, the dynamic actuation responses can be achieved by laser processing on hydrogel surfaces. For example, Zhang et al. designed multi-channel information on the hydrogel surface using the multifunctional dose domain of femtosecond lasers[161]. The high-dose mode of femtosecond laser created microgrooves on the surface of the hydrogel, and the low-dose laser programmed fluorescence intensity in the non-ablative area [Figure 10B]. This created thermally responsive information patterns that reconfigure during temperature change. The integration of precision microfabrication with hydrogel programmability establishes a novel paradigm for developing dynamically responsive soft actuators.
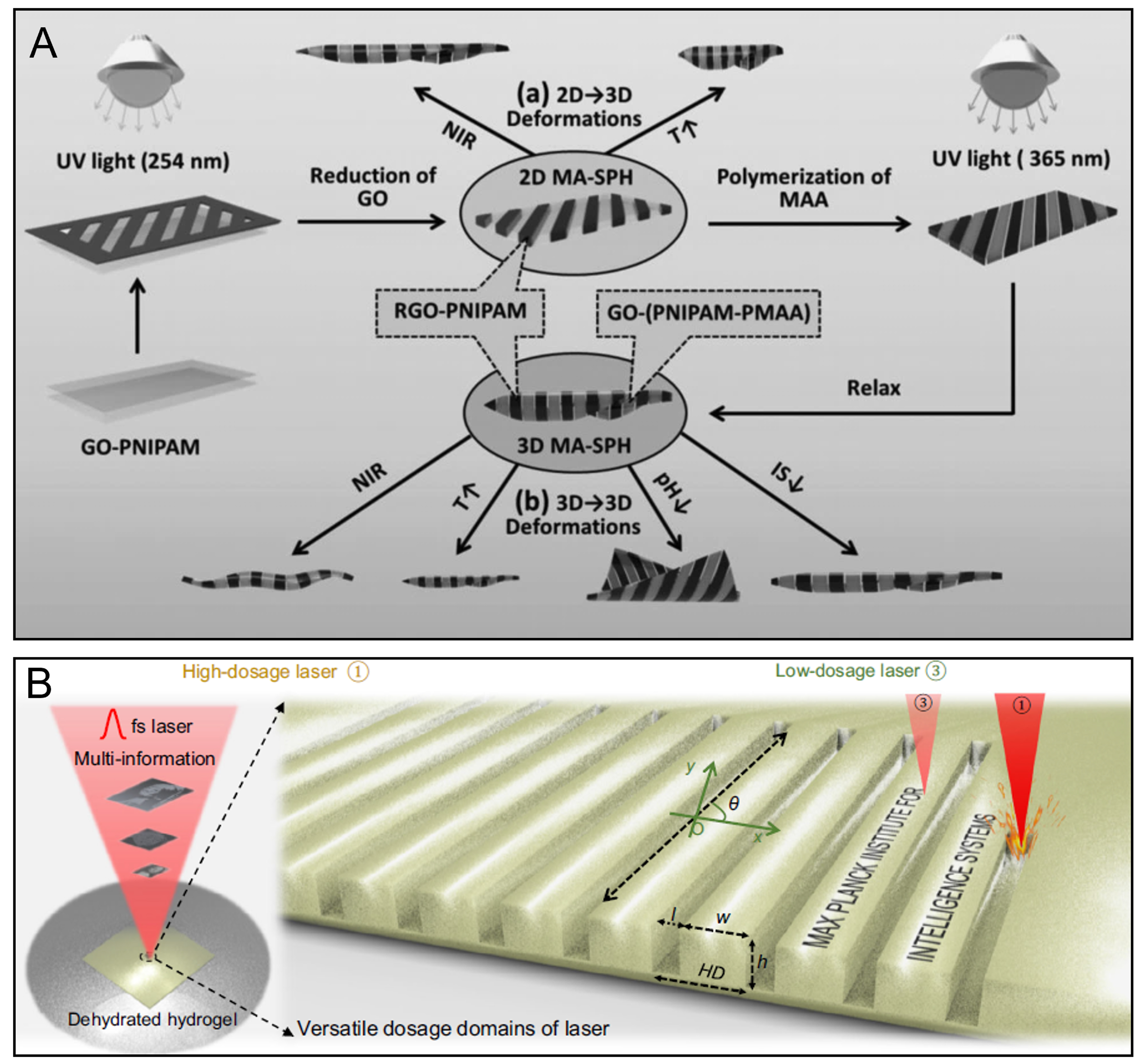
Figure 10. The anisotropic hydrogel actuator prepared by photolithography. (A) Multi-stimulus responsive hydrogel with multi-deformation capability prepared based on photo masking technique. Reproduced with permission[160]. Copyright 2016, Wiley-VCH; (B) The thermoresponsive hydrogel for encoding multi-information prepared by multi-dosage of the femtosecond laser[161]. Copyright 2023, Springer Nature Publishing Group.
Based on the structural controllability and programmable spatiotemporal deformation, hydrogel actuators are now advancing industrially using micro-nano processing technologies such as 3D printing and photolithography. For example, Object’s FULLCure705 water-soluble photocurable support material enables high-precision 3D printing. Ni et al. developed shape memory hydrogel actuators activated solely by the body’s environment, addressing challenges in deploying implantable devices spatiotemporally[162]. The Low-temperature printing proposed by Li et al. used a “freeze first, then melt” process for instant hydrogel solidification and interfacial crosslinking, overcoming 3D forming bottlenecks to create multifunctional hydrogel robots[163]. These advances highlight the significant potential of printing and photolithography in medical devices, flexible electronics, and microrobots[164,165]. However, industrial development still faces some challenges: (1) While carbon-based (GO, CNTs) and biomaterials (CS, CMC) are well-established, the high cost of MXenes and precious metals hinders large-scale application; (2) Printing technology is often time-consuming and best suited for centimeter-scale devices; (3) Lithography technology is constrained by the cost of photosensitive materials and etching speed. Therefore, future efforts should focus on developing technical strategies to improve processing efficiency.
To sum up, synergistic integration of SRBs selection with anisotropic structural engineering offers a robust pathway to develop programmable multi-stimulus hydrogel actuators with rich application prospects. Incorporating SRBs into hydrogels significantly improved the actuation performance of soft hydrogel actuators, enabling multi-stimuli responsiveness (light, heat, electricity, magnetism, pH, and solvent). Concurrently, anisotropic structural designs (oriented, gradient, layered, and patterned structures) further optimize high-performance actuators. Specifically: Microstructural designs improve actuation efficiency; Macroscale layered/patterning strategies enable multimodal actuation and 3D shape-morphing; Additive manufacturing and laser microfabrication enhance structural precision and functional complexity [Table 3]. However, challenges such as controllability of microstructures, reliability of multi-interface systems, and the high costs associated with precision technologies still require further breakthroughs.
A summary of design strategies for hydrogel actuators based on SRBs
| Structures | Building blocks | Polymer matrices | Design strategies | Stimulus types | Deformation modes | Response time | Deformation amplitude | Ref. |
| Isotropic structure | CNT | PVA/CS | Filler lead-in | Electricity, temperature | Bending, shape recovery | 26 s (electricity) | 71° | [76] |
| CNT | p(AMPS-co-AA) | Interpenetrating network | Electricity | Bending | 50 s | 90° | [122] | |
| GO, MWCNT | PEO-b-PPO-b-PEO | 3D printing | Light | Volume contraction | 180 s | 70% | [149] | |
| Oriented structure | CNT | PNIPAM | Directional alignment | Temperature, light | Anisotropic contraction | < 3 s (light) | 60% | [123] |
| Ag NPs | PAAm | Self-assembly | Light, solvent, pH | Anisotropic bending or contraction | Several minutes | 180°/80% (solvent) | [32] | |
| MXene | PNIPAM | Ice template | Light, temperature | Anisotropic bending or contraction | 2 s (light), 30 s (temperature) | 70% (light), 360° (temperature) | [40] | |
| NFC | PAAm | 3D printing induced arrangement | Temperature | Programmable bending, helix, and twisting | - | - | [154] | |
| Gradient structure | GO; MXene; [Na0.5]inter[Li0.5Mg2.5]oct[Si4]teterO10F2 NSs, Au NPs | PNIPAM | Electric field | Light; Light; Light and temperature | Bending and lifting; Programmable bending and curling; Programmable deformation | 40 s; 30 s; Several seconds | 300°; 360°; Curling and twisting | [132-134] |
| GO | PDMAEMA | UV light | Temperature, light | Programmable crimping and folding | Millisecond (ms)-level snap | 1,080° | [121] | |
| GO | PNIPAM, PMAA | Photolithography | Light, temperature, pH, IS | Multi-dimensional programmable deformation | 2-100 s (light) | 450° (temperature) | [160] | |
| Ag NSs; IPs | PNIPAM | Gravity | Temperature | Bending, curling, and lifting | 52°/s; 90°/s | 560°; 720° | [41,131] | |
| Fe NPs | PIC | Magnetic field | Magnetism | Anisotropic deformation | - | - | [124] | |
| Fe3+; Zr4+ | p(AAm-co-VI)/QCS; p(NIPAM-co-SPA) | Permeation | Temperature, humidity; Temperature | Bending | -; 22 s | -; 225° | [135,136] | |
| Eu3+, Tb3+, TAHEM | PAAc-co-PNIPAM | 3D printing | Temperature, light | Bending and folding | - | - | [44] | |
| Layered structure | GO | PNIPAM, PDMAA | Bilayer | Light | Bending | 30-90 s | 32° (air) and 90° (water) | [142] |
| Fe3O4 | p(NIPAM-ABP) | Bilayer | Light, electricity, magnetism | Bending and crawling | 1.1 s (light) | 360° (light) | [143] | |
| VLDHs; Si NPs | PNIPAM, PAAm | Bilayer | Light; Temperature | Bending and curling | 70 s; 60 s | 360°; 360° | [42,113] | |
| Patterned structure | GO | PNIPAM | The local bilayer | Light | Bending and crawling | 3 min | 180° | [147] |
| K-MXene/PEDOT: PSS | PNIPAM | The bilayer with an arrangement angle | Light | Programmable deformation | 11 s | 50° | [43] | |
| Laponite | PNIPAM, PAAm | The asymmetric bilayer | Temperature | Bending and crawling | One cycle | Moved 12.2% body length | [159] | |
| Phenol red | p(NIPAM-AAm-HEMA) | Femtosecond laser | Temperature | Programmable pattern | Several seconds to minutes | Adjustable height and fluorescence intensity | [161] |
ADDITIONAL FUNCTIONS AND REPRESENTATIVE APPLICATIONS OF HYDROGEL ACTUATORS
In addition to the SD in response to external stimuli, the stimuli-responsive hydrogels incorporating SRBs exhibit additional functionalities, such as color change[166,167], conductivity change[168], tunable adhesion[169], and self-healing[170]. It demonstrates promising application prospects in information encryption, wearable sensor devices, and soft robotics. Therefore, in this section, we discuss the additional functions and multidisciplinary application prospects of SRBs-based multi-stimulus responsive hydrogel actuators through representative examples [Table 4].
A summary of additional functions and applications for hydrogel actuators based on SRBs
| Additional functions | Building blocks | Design strategies | Stimulus types | Applications | Ref. |
| Color change | Eu3+ | Bilayer structure | Temperature, pH | Information transmission | [145] |
| TPE-4N | Bilayer structure | pH | Bionic flower | [171] | |
| Graphene | Four-layer structure | Temperature, electricity | Bionic chameleon robot | [172] | |
| Polysulfated benzene derivatives | Homogeneous structure | Light, H+, Eu3+ | Information encryption | [166] | |
| GO, TPE | Bilayer structure | Light | The display of information The fluorescent on-off switches | [167] | |
| Conductivity | Graphene | Bilayer structure | Electricity, light | Environmental monitoring | [173] |
| MXene | Bilayer structure | Light | Artificial octopus; artificial fish | [43] | |
| PANI | Bilayer structure | Light | Senor | [174] | |
| Ag NSs | Gradient structure | Temperature | Gripper; wearable electronics | [41] | |
| PANI | Homogeneous structure | Light | Soft robot | [45] | |
| SCFs | Oriented structure | Temperature | Soft robot | [168] | |
| Adhesion | SBMA, MXene, CaCl2 | Bilayer structure | Light | Gripper | [175] |
| PNIPAM/PAAc-Fe3+ | Fiber sequence structure | Temperature | Gripper | [46] | |
| Self-healing | MWCNT, PAAc/CS | Bilayer structure | Electricity | Artificial muscle | [170] |
| Ag NPs | Oriented structure | Light, pH, solvent | Mechanical arm | [32] |
Color-changing function and information encryption
Inspired by the color-changing capabilities of creatures such as chameleons and octopuses in nature, hydrogel actuators with collaborative color-changing capabilities have been extensively studied. SRBs with luminescence ability or potential color response, such as rare earth ions, fluorescent monomers, and aggregation-induced emission (AIE) materials, are expected to confer special color-responsive characteristics. As a kind of smart soft material with tunable luminescence, fluorescent hydrogels can significantly change the emission state and intensity under external stimulation following special molecular design, thereby meeting diverse practical applications. Therefore, the hydrogel actuators capable of shape-morphing and fluorescence/color changes have practical significance for information encryption and bioinspired camouflage[176].
Current research on hydrogel actuators with color-changing properties predominantly focuses on multilayer structures. For instance, based on the metamorphic development of the luminescent sucker octopus, Wang et al. developed a generalized inside-out stepwise growth strategy to construct environmentally responsive bilayer fluorescent hydrogel actuators, comprising an initial layer (e.g., the red-light-emitting Eu3+ coordinated hydrogel) and a growth layer (e.g., temperature-responsive sky-blue fluorescent hydrogel or pH-responsive chartreuse fluorescent hydrogel)[145]. The hydrogel exhibited simultaneous responses to temperature and pH, achieving both fluorescence discoloration and SD [Figure 11A]. In addition, the actuator demonstrated 3D SD similar to origami and responded to different environmental stimuli, achieving environmentally interactive visual information transmission through patterned structural programming [Figure 11B]. Meanwhile, Yang et al. prepared a pH-responsive SD hydrogel sheet containing PAAc and a pH-responsive amino-functionalized tetraphenylethene (TPE-4N) fluorescent color (FC) hydrogel sheet[171]. The flower-shaped FC/SD bilayer hydrogel actuators prepared by interfacial bonding between FC and SD sheets achieved synergistic shape and fluorescence changes in response to pH stimulation [Figure 11C]. This provides ideas for the development of artificial soft actuators that mimic biological synergistic deformation and fluorescence color change (SDFC) and autonomous dynamic behavior. Besides, Xie et al. proposed a bio-inspired electrically controlled four-layer hydrogel actuation system (PH3D) with fluorescence color change. Through the process of “electrothermal conversion of the graphene layer followed by heat transfer of the PDMS layer”, the shrinkage and blue-to-chartreuse color change of the PH3D fluorescent hydrogel were realized. By further combining with acoustic sensors, a biomimetic soft chameleon robot with environmental interaction adaptability was successfully developed [Figure 11D][172]. More significantly, the development of stimuli-responsive hydrogel actuators with color/shape changes enables information concealment/revealing, facilitating advanced information encryption and anti-counterfeiting applications. Lu et al. developed a gradient wood hydrogel actuator capable of efficient information encryption and recording[177]. This actuator exhibited reversible transparency transitions in response to temperature changes. Leveraging this thermo-responsive transparent/opaque switching property, the hydrogel actuator functioned as an anti-counterfeit label overlaid on QR codes, enabling their encryption and decryption. Furthermore, the transparency transition, induced by ethanol, allowed for writable recording on the anti-counterfeit label. The recorded information self-erased upon ethanol evaporation. This work offers a novel strategy for applying smart materials in information security and holds significant commercial promise for developing high-end anti-counterfeit labels and dynamic encryption cards, paving the way for industrial-scale applications.
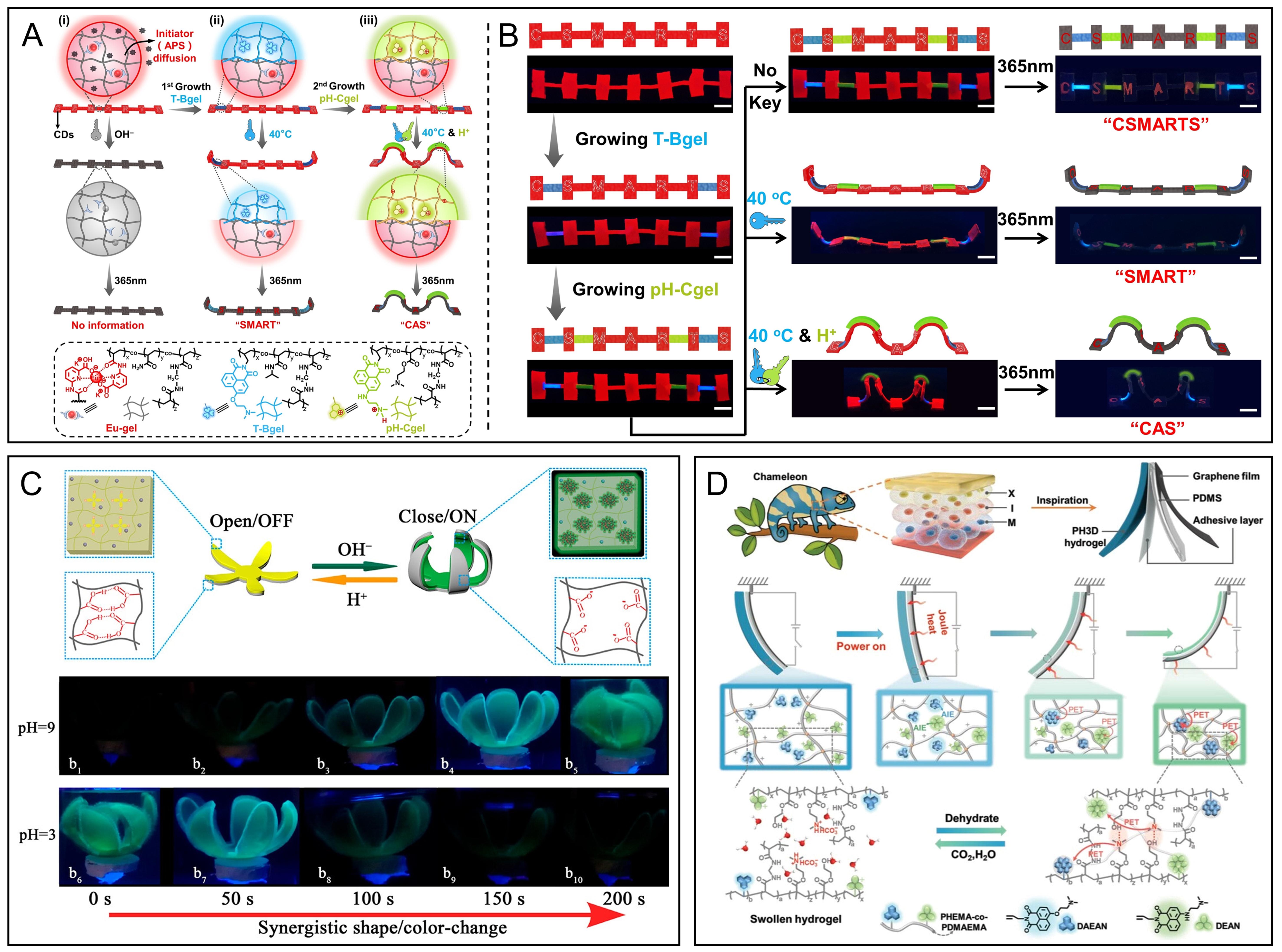
Figure 11. Hydrogel actuators with synergistic fluorescence and deformation capabilities. (A) Schematic of the preparation of fluorescent hydrogels; (B) Fluorescent hydrogels for environmentally interactive visual messaging through the use of different environmental bonds (40 °C or H+). Reproduced with permission[145]. Copyright 2023, Wiley-VCH; (C) Biomimetic flowers with deformation and luminescence abilities under pH stimulation. Reproduced with permission[171]. Copyright 2022, American Chemical Society; (D) A biomimetic soft chameleon robot with collaborative color changing and deformation. Reproduced with permission[172]. Copyright 2023, Wiley-VCH.
Conductive function and sensors
Natural organisms dynamically adapt their physical state by sensing environmental changes through neural activity. For example, mice navigate obstacles using their whiskers, while platypuses detect and catch prey in murky water through their long and flat beaks. Inspired by nature, researchers are developing self-aware soft actuators, which will form the basis for the next generation of self-diagnostic, autonomous soft robots and smart biomaterials. The introduction of SRBs with conductive properties is expected to achieve the goal.
The introduction of conductive sensing SRBs, such as electronically conductive materials (graphene, CNTs, etc.), ionically conductive materials (metal ions), and conductive polymers (PANI, PPy, etc.), into hydrogel actuators can endow self-sensing performance[174,178,179]. Currently, the most widely studied are bilayer actuators with conductive hydrogel as the active layer. For example, Chen et al. added graphene into a mixed solution of 20% PVA/80% PNIPAM, polymerizing and freeze-casting it to obtain an active-layer gel with excellent electrical conductivity and photothermal ability[173]. This was paired with a passive layer of 80% PVA/20% PNIPAM. Under an applied electric field, the surface temperature (T), bending angle (A), and electron current (I) of this actuator responded dynamically to light stimulation, addressing motion self-sensing limitations in obscured environments [Figure 12A and B]. When connected to the control closed circuit, the actuator realized closed-loop monitoring and sensing feedback. Similarly, Xue et al. synthesized a conductive hydrogel using MXene, achieving high conductivity (11.76 S·m-1) and strain sensitivity [gauge factor (GF): 9.93]. They further developed a shape-programmable somatosensory hydrogel actuator with fast response, light-driven remote control, and self-sensing capabilities[43]. Qian et al. constructed a functional conductive hydrogel by introducing PANI into a poly (N-isopropylacrylamide-co-acrylamide)/poly (vinyl alcohol) (PNA/PVA) dual-network hydrogel. Combined with a passive PAAm layer, the actuator detected resistance changes during NIR-induced deformation, exhibiting piezoresistive strain/pressure sensing in motion recognition and physiological signal monitoring [Figure 12C and D][174].
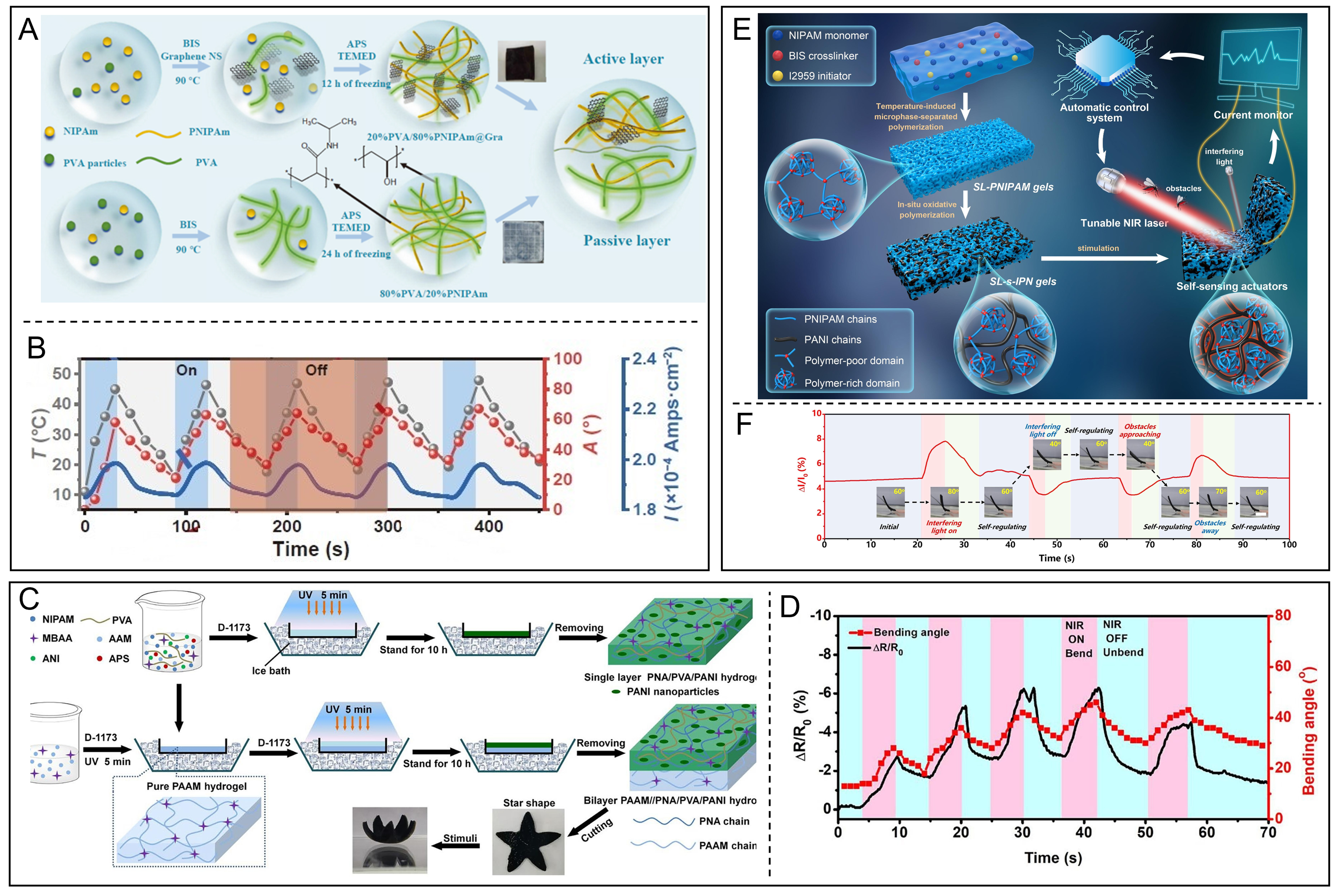
Figure 12. Hydrogel actuators with synergistic conductive sensing and deformation capabilities. (A) The conductive hydrogel actuator based on graphene; (B) Sensing signal monitoring of conductive hydrogel actuator under cyclic light stimulation. Reproduced with permission[173]. Copyright 2022, Springer Nature; (C) The bilayer conductive hydrogel actuator based on PANI; (D) Real-time resistance change detection during deformation of hydrogel actuator. Reproduced with permission[174]. Copyright 2023, Elsevier; (E) The self-sensing hydrogel actuator with sponge-like semi-interpenetrating dual network based on PANI; (F) Real-time electrical signal and typical optical images (insets) of the self-adaptive SL-s-IPN actuator under different interfering factors. Reproduced with permission[45]. Copyright 2023, Elsevier. PANI: Polyaniline; SL-s-IPN: spongy-structured PANI and PNIPAM semi-interpenetrating networks.
Although bilayer structures can combine the advantages of hydrogel actuators and conductive hydrogels to achieve actuation and conductive aggregation, most multilayer hydrogels have lower response deformation speeds and weaker interfacial adhesion, which lead to delamination failures. Consequently, gradient hydrogels with monolayers and anisotropic structures are gaining focus for their non-delamination, fast and smooth actuation, and easy control under uniform external stimuli. Liu et al. developed an octopus-tentacle-inspired gradient hydrogel. With the help of gravity-driven rapid precipitation of Ag NSs, it achieved ultrafast temperature response actuation (52.3° s-1) and high conductivity (> 1,231 S·m-1)[41]. Furthermore, Cui et al. prepared spongy PNIPAM hydrogels through temperature-induced microphase separation polymerization, and then constructed spongy-structured PANI and PNIPAM semi-interpenetrating networks (SL-s-IPN) by in situ oxidative polymerization[45]. The microporous structure and photo impermeability enabled real-time self-sensing of morphology and conductivity, advancing artificial intelligence (AI) in soft robotics [Figure 12E and F].
With its outstanding electro-sensing performance, the hydrogel actuators show great potential in fields such as wearable devices, medical devices, and human-machine interaction. Integrating them with existing technologies can realize a new generation of human-machine interaction systems. For example, Shen et al. developed a tactile skin based on a super-capacitive ion gel pressure sensor[180]. Its sensitivity reached up to 1.5 kPa-1 (44 times that of traditional sensors), with a response time of just 18 ms (faster than the 40 ms of human skin). Integrating this skin into a soft biomimetic hand enabled real-time feedback on grasping force, providing powerful real-time tactile feedback for industrial robots and amputees, and assisting amputees in distinguishing object shapes. Xiao et al. developed a continuously producible gradient nanoporous cellulose/CNTs aerogel fiber (GAF) inspired by the efficient water transport mechanism of plant roots[181]. These GAFs exhibited rapid water transport and efficient evaporation, generating a voltage of 510 mV per centimeter of fiber. When integrated into fabric arrays, GAFs provided stable energy harvesting, delivering an output voltage of 4.5 V and a current of 60 μA under simulated human sweat conditions, sufficient to power small devices such as wristwatches. While significant breakthroughs have been achieved in integrating electro-sensing-enabled hydrogel actuators with wearable devices/prosthetics, several bottlenecks remain to be addressed[182]. Firstly, the modulus mismatch between hydrogels and human tissues or traditional electrodes can lead to interface failure. Secondly, such self-powered systems overly rely on external stimuli and have low self-sustaining efficiency. Thirdly, long-term use of hydrogel materials still poses risks such as dehydration and inflammation. Future research should persistently focus on three key areas: material innovation (developing sustainable hydrogel materials with tunable mechanical and electrical properties), energy optimization (coupling environmental energy to achieve external power-free operation), and system integration (incorporating AI and algorithms), thereby fundamentally redefining the paradigm of human-machine interaction.
Adhesive function and intelligent grippers
In nature, many organisms have admirable adhesion abilities to better adapt to the environment. For example, octopuses walk and prey through suction cups on their tentacles, while pitcher plants capture insects through the secretion of mucus. Intelligent actuators with adhesive functionalities are playing an increasingly important role in applications such as medical equipment, industrial manufacturing, and robotic grippers. They rely on their robust adhesion or structural transformations to achieve capture and release behavior. Inspired by animals and plants, researchers have developed a series of bionic stimulus-responsive hydrogel actuators with adhesive properties. This is achieved either by integrating adhesive materials into hydrogel actuators or by constructing bionic adsorption structures. For example, Wang et al. prepared a bilayer hydrogel gripper exhibiting photothermally controlled adhesion[175]. The adhesive layer was composed of a copolymer of zwitterionic [2-(methacryloxy) ethyl] dimethyl-(3-sulfopropyl) (SBMA) and acrylic acid (AAc). The abundant carboxyl and zwitterionic groups within the PAAc/SBMA hydrogel facilitated strong coordination, hydrogen bonding, electrostatic, and ion-dipole interactions with diverse substrates. This resulted in strong adhesion with a maximum peeling force of up to 280 N·m-1. The active layer was composed of PNIPAM containing polydopamine-modified MXene (P-MXene) and calcium chloride (CaCl2). The strong adhesion of the adhesive layer made it easy to grasp and move objects. When NIR irradiated the active layer, the gripper underwent photothermally induced deformation, opening an angle to release the object [Figure 13A]. Ma et al. prepared a novel hydrogel actuator with asymmetric bilateral structures, achieving capture and release of objects reversibly underwater[46]. One side of the actuator was an unstructured PNIPAM/PAAc-Fe3+ hydrogel film, while the opposite side consisted of aligned PNIPAM/PAAc-Fe3+ hydrogel fibers. When the temperature increased or rapid solvent exchange between ethanol and water occurred, the actuator underwent rapid and reversible bending with a large actuation force of 21 mN. In addition, the surface friction force at the fiber side of the hydrogel increased or decreased with increasing or decreasing temperature due to the change in water content. This friction modulation enabled the actuator to capture and lift a plastic ball underwater and subsequently release it reversibly after lowering the water temperature [Figure 13B].
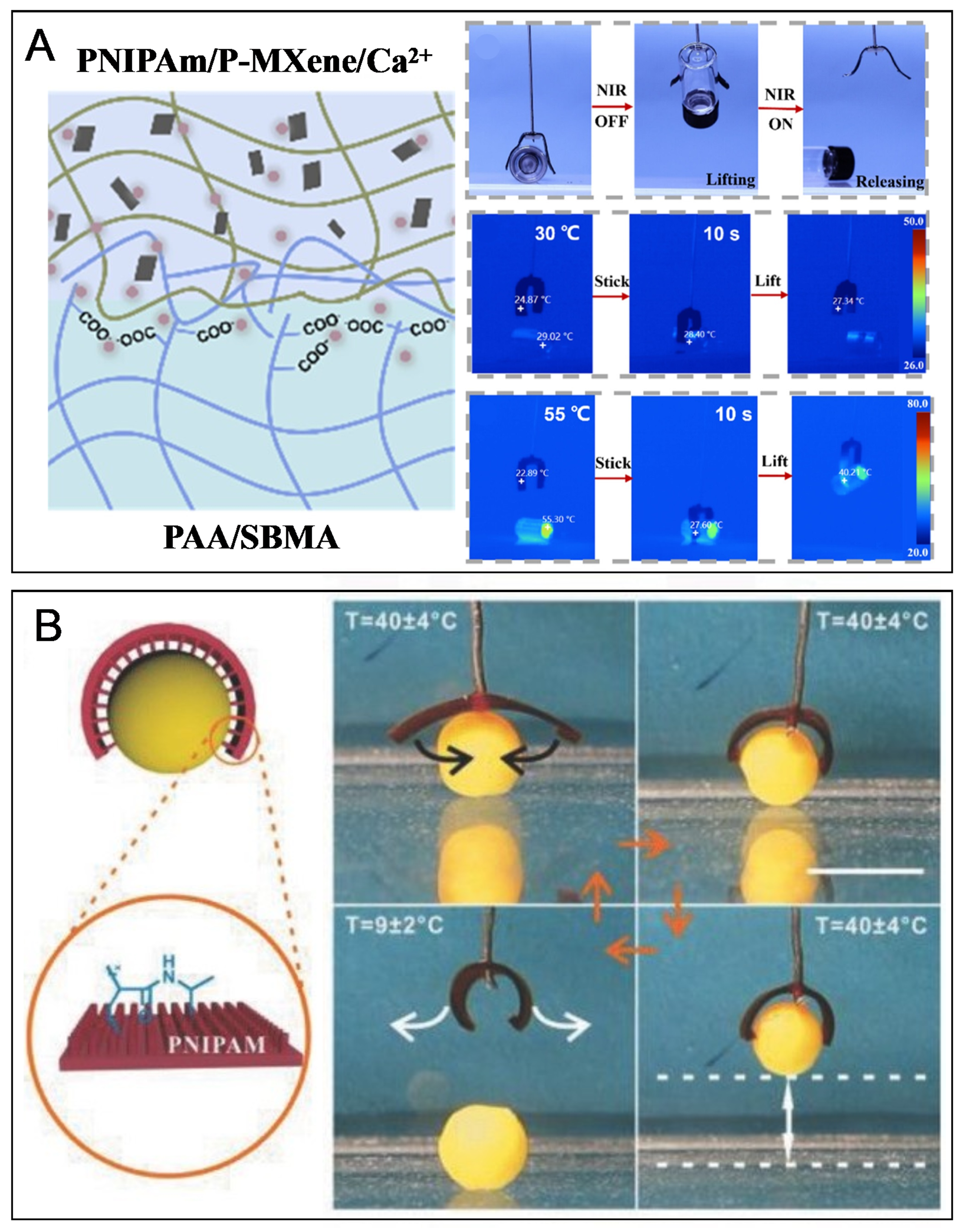
Figure 13. Hydrogel actuators with synergistic adhesion and deformation capabilities. (A) The bilayer hydrogel actuator gripper with adhesive layer. Reproduced with permission[175]. Copyright 2023, American Chemical Society; (B) The hydrogel actuator gripper based on an asymmetric structure. Reproduced with permission[46]. Copyright 2019, Wiley-VCH.
Surprisingly, this controllable adhesion enables soft grippers to grasp or manipulate a wider variety of objects. It enhances the interaction between the grippers and the objects, thereby increasingly automating the robots’ precise operations[183]. Wang et al. used 3D printing technology to create octopus-inspired hydrogel suckers with reversible adhesion[184]. Based on suction pressure and liquid surface force, the hydrogel sucker achieved adhesion forces of ~48 kPa in air and ~57 kPa underwater, enabling it to lift a
In summary, by introducing SRBs with different properties and functions into hydrogels and combining them with reasonable anisotropic structural designs, hydrogel actuators with color-changing, conductive sensing, or adhesion/de-adhesion functions can be prepared, enabling their widespread application, such as information encryption, wearable sensors, or smart soft grippers. Additionally, through multi-system integration, multifunctional hydrogel platforms that integrate information encryption and actuation-sensing can be further developed. As exemplified by Shang et al., an externally applied electric field-induced gradient hydrogel actuator based on PANI-functionalized MXene (P-MXene) was fabricated. This actuator combined fast actuation performance (9° s-1) with high sensing characteristics (GF = 3.11), enabling real-time detection of resistance changes during bending deformation. Subsequently, they assembled this hydrogel actuator with a patterned display panel to form a biomimetic information system, achieving diverse patterned information display through different bending angles[103]. However, this approach primarily achieves functional superposition within a single hydrogel system.
Considering the environmental diversity and operational complexity in practical applications, it is necessary to simulate the collaborative working mechanisms of biological systems[186,187]. This entails deep integration of actuation, sensing, and information processing functionalities into a unified hydrogel system to achieve a closed-loop “perception-thinking-action” capability. For example, Liu et al. achieved remote interaction between soft and rigid robots via Internet of Things (IoT) technology[188]. They first developed a self-sensing gradient hydrogel actuator (PSM) based on the precipitation effect of molybdenum dioxide nanosheets (MoO2 NSs). This PSM hydrogel exhibited rapid actuation response (21° s-1) and high-precision sensing performance (GF = 3.94), enabling precise detection of human movement and physiological signals. Subsequently, IoT technology was used to integrate the PSM hydrogel, signal acquisition/transmission unit, signal reception/control unit, and rigid robotic hand terminal into an integrated system. The voltage signals generated by the PSM hydrogel’s deformation in response to stimulation were captured by a chip receiver and converted into digital signals; these digital signals were then transmitted via Bluetooth to another chip receiver, converted into corresponding bending angle commands for the robotic hand, thereby achieving a closed-loop control system of “actuation-sensing-feedback”. Zhang et al. empowered a self-sensing hydrogel actuator with intelligent object recognition by integrating machine learning (ML) technology[189]. They employed a ML algorithm based on a convolutional neural network (CNN) to map the electrical signals output by the hydrogel actuator to corresponding shape results, enabling soft robots to perform intelligent recognition. Collectively, these advances demonstrate that integrating cutting-edge technologies such as AI and ML is an effective approach for developing intelligent interactive actuators.
CONCLUSIONS AND OUTLOOK
By carefully selecting hydrogel polymer matrices and incorporating SRBs with appropriate anisotropic structural designs, hydrogel actuators with targeted functions can be developed for specific applications. This review first summarizes the types of commonly used hydrogel polymer matrices and their deformation mechanisms. Subsequently, based on the structural characteristics of different SRBs, it systematically explores strategies for constructing anisotropic structures in stimulus-responsive hydrogel actuators. Finally, it summarizes and discusses the additional functions achieved by SRBs-based anisotropic hydrogel actuators and their corresponding applications. Overall, during the initial design stage, it is essential to closely integrate application requirements and key challenges, select optimal polymer matrices and SRBs, and employ suitable preparation techniques to efficiently develop the target actuator. Notably, when incorporating SRBs into hydrogel networks, multiple factors must be considered: (1) The role of SRBs in the network structure: SRBs should function beyond merely filling pores. The optimal strategy lies in fully leveraging the structural and functional properties of SRBs, utilizing their covalent/non-covalent interactions with the polymer matrix to enhance stimulus-response efficiency while significantly improving control over the hydrogel’s microstructure; (2) The effect of SRBs on hydrogel performance: Ideal SRBs not only optimize the deformation patterns of actuators by regulating microstructure but also achieve composite performance optimization through network design and multi-component synergy, thereby driving the multifunctional integration of actuators; (3) Functions conferred to hydrogels by SRBs. In addition to stimulus-responsive deformation, SRBs can also endow hydrogel actuators with color-changing, conductive sensing, adhesion/de-adhesion, and self-healing, thereby enhancing the cross-disciplinary application potential. Currently, introducing SRBs with multiple properties into the hydrogel network, constructing anisotropic structures at the microscopic level, and assembling/arranging/patterning structures at the macroscopic surface to create programmable deformation structures are the primary strategies for designing multifunctional, multi-stimulus-responsive hydrogel soft actuators [Figure 14].
Figure 14. Future strategies for designing smart hydrogel actuators. Author-generated images.
Although multifunctional, multi-stimulus-responsive hydrogel actuators based on SRBs hold promising application prospects across multiple fields, their practical deployment still faces significant challenges: (1) Insufficient driving force and response speed. Most hydrogel actuators rely on water diffusion mechanisms (osmotic pressure-driven), resulting in relatively low driving forces inadequate for tasks such as heavy object grasping or mechanical work; (2) Poor environmental adaptability. Dependence on aqueous environments and sensitivity to temperature/humidity limit applicability. Prolonged contact with biological tissues may also trigger inflammatory reactions or toxicity issues from degradation products; (3) Complexity of multifunctional integration and control. While existing technologies can achieve simple functional superposition, they often require additional structural design and struggle to achieve precise synergistic control of multifunctional and multimodal deformation; (4) Difficulty in achieving large-scale manufacturing. Traditional molding methods lack micron-level precision, and the use of specific SRBs and customized equipment increases manufacturing costs.
To overcome these limitations, future research should focus on collaborative innovation in biomimetic intelligent material systems. (1) Material innovation: Develop stimulus-responsive network structures with biomimetic properties to enhance the strength and environmental stability of hydrogels; construct hybrid organic-inorganic systems to effectively integrate multiple SRBs; and design non-aqueous driving mechanisms using dynamic reversible crosslinking, isomerization, and other physicochemical effects to enhance actuation efficiency; (2) Structural design optimization: Employ precision manufacturing techniques such as 4D printing and lithography to construct biomimetic heterogeneous topological structures, enabling multi-stimulus synergistic actuation; integrate digital technologies (AI, ML, and physical simulation) to enhance multifunctional integration and motion control precision; (3) Intelligent closed-loop control and manufacturing: Combine AI to optimize multi-material additive manufacturing processes; embed smart chips to construct a biomimetic intelligent interaction system integrating “actuation-sensing-feedback”. We believe that, through interdisciplinary collaboration, achieving breakthroughs across the entire chain in material design, structural optimization, and system integration will inevitably drive the practical application of hydrogel actuator systems.
DECLARATIONS
Authors’ contributions
Designed and composed the content of the manuscript: Li, X.; Li, L.; Liu, X.
Supervised this work and provided guidance: Hu, Y.
All authors discussed and approved the final version of the manuscript.
Availability of data and materials
Not applicable.
Financial support and sponsorship
The work was supported by the National Natural Science Foundation of China (22275048, 22411530048), the Fundamental Research Funds for the Central Universities of China (JZ2023YQTD0074), and the Anhui Provincial Natural Science Foundation (2008085J22).
Conflicts of interest
All authors declared that there are no conflicts of interest.
Ethical approval and consent to participate
Not applicable.
Consent for publication
Not applicable.
Copyright
© The Author(s) 2025.
REFERENCES
2. Cheng, Y.; Chan, K. H.; Wang, X. Q.; et al. Direct-ink-write 3D printing of hydrogels into biomimetic soft robots. ACS. Nano. 2019, 13, 13176-84.
3. Jiang, J.; Xu, S.; Ma, H.; Li, C.; Huang, Z. Photoresponsive hydrogel-based soft robot: a review. Mater. Today. Bio. 2023, 20, 100657.
4. Chen, C. R.; Qin, H.; Cong, H. P.; Yu, S. H. A highly stretchable and real-time healable supercapacitor. Adv. Mater. 2019, 31, e1900573.
5. Qin, H.; Liu, P.; Chen, C.; Cong, H. P.; Yu, S. H. A multi-responsive healable supercapacitor. Nat. Commun. 2021, 12, 4297.
6. Herrmann, A.; Haag, R.; Schedler, U. Hydrogels and their role in biosensing applications. Adv. Healthc. Mater. 2021, 10, e2100062.
7. Ko, S.; Chhetry, A.; Kim, D.; Yoon, H.; Park, J. Y. Hysteresis-free double-network hydrogel-based strain sensor for wearable smart bioelectronics. ACS. Appl. Mater. Interfaces. 2022, 14, 31363-72.
8. Pham, T. T.; Tran, P. L.; Phung, C. D.; et al. Surface-triggered in situ gelation for tunable conformal hydrogel coating of therapeutic cells and biomedical devices. Adv. Funct. Mater. 2021, 31, 2010169.
9. Barrett-Catton, E.; Ross, M. L.; Asuri, P. Multifunctional hydrogel nanocomposites for biomedical applications. Polymers 2021, 13, 856.
10. Kulbay, M.; Wu, K. Y.; Truong, D.; Tran, S. D. Smart molecules in ophthalmology: hydrogels as responsive systems for ophthalmic applications. Smart. Mol. 2024, 2, e20230021.
11. Tang, L.; Wang, L.; Yang, X.; Feng, Y.; Li, Y.; Feng, W. Poly(N-isopropylacrylamide)-based smart hydrogels: design, properties and applications. Prog. Mater. Sci. 2021, 115, 100702.
12. Xiang, S.; Su, Y.; Yin, H.; Li, C.; Zhu, M. Visible-light-driven isotropic hydrogels as anisotropic underwater actuators. Nano. Energy. 2021, 85, 105965.
13. Le, X.; Lu, W.; Zhang, J.; Chen, T. Recent progress in biomimetic anisotropic hydrogel actuators. Adv. Sci. 2019, 6, 1801584.
14. Li, W.; Guan, Q.; Li, M.; Saiz, E.; Hou, X. Nature-inspired strategies for the synthesis of hydrogel actuators and their applications. Prog. in. Polym. Sci. 2023, 140, 101665.
15. Kuang, X.; Arıcan, M. O.; Zhou, T.; Zhao, X.; Zhang, Y. S. Functional tough hydrogels: design, processing, and biomedical applications. Acc. Mater. Res. 2023, 4, 101-14.
16. Son, H.; Yoon, C. Advances in stimuli-responsive soft robots with integrated hybrid materials. Actuators 2020, 9, 115.
17. Liu, J.; Jiang, L.; He, S.; Zhang, J.; Shao, W. Recent progress in PNIPAM-based multi-responsive actuators: a mini-review. Chem. Eng. J. 2022, 433, 133496.
18. Nonoyama, T.; Gong, J. P. Tough double network hydrogel and its biomedical applications. Annu. Rev. Chem. Biomol. Eng. 2021, 12, 393-410.
19. Yang, F.; Ren, B.; Cai, Y.; et al. Mechanically tough and recoverable hydrogels via dual physical crosslinkings. J. Polym. Sci. B. Polym. Phys. 2018, 56, 1294-305.
20. Zhao, Z.; Li, Y.; Wang, H.; et al. Ultra-tough self-healing hydrogel via hierarchical energy associative dissipation. Adv. Sci. 2023, 10, e2303315.
21. Huang, Y.; Xiao, L.; Zhou, J.; et al. Strong tough polyampholyte hydrogels via the synergistic effect of ionic and metal–ligand bonds. Adv. Funct. Mater. 2021, 31, 2103917.
22. Dai, C. F.; Zhang, X. N.; Du, C.; et al. Photoregulated gradient structure and programmable mechanical performances of tough hydrogels with a hydrogen-bond network. ACS. Appl. Mater. Interfaces. 2020, 12, 53376-84.
23. Huang, G.; Tang, Z.; Peng, S.; et al. Modification of hydrophobic hydrogels into a strongly adhesive and tough hydrogel by electrostatic interaction. Macromolecules 2022, 55, 156-65.
24. Chen, N.; He, X.; Lu, Q. Highly stretchable, repairable, and tough nanocomposite hydrogel physically cross-linked by hydrophobic interactions and reinforced by surface-grafted hydrophobized cellulose nanocrystals. Macromol. Rapid. Commun. 2023, 44, e2300053.
25. Yang, B.; Wei, Z.; Chen, X.; Wei, K.; Bian, L. Manipulating the mechanical properties of biomimetic hydrogels with multivalent host-guest interactions. J. Mater. Chem. B. 2019, 7, 1726-33.
26. Fu, R.; Guan, Y.; Xiao, C.; et al. Tough and highly efficient underwater self-repairing hydrogels for soft electronics. Small. Methods. 2022, 6, e2101513.
27. Zhu, J.; Guan, S.; Hu, Q.; Gao, G.; Xu, K.; Wang, P. Tough and pH-sensitive hydroxypropyl guar gum/polyacrylamide hybrid double-network hydrogel. Chem. Eng. J. 2016, 306, 953-60.
28. Han, J.; Park, J.; Bhatta, R.; et al. A double crosslinking adhesion mechanism for developing tough hydrogel adhesives. Acta. Biomater. 2022, 150, 199-210.
29. Su, J.; Zhang, L.; Wan, C.; et al. Dual-network self-healing hydrogels composed of graphene oxide@nanocellulose and poly(AAm-co-AAc). Carbohydr. Polym. 2022, 296, 119905.
30. Ning, X.; Huang, J.; A, Y.; Yuan, N.; Chen, C.; Lin, D. Research advances in mechanical properties and applications of dual network hydrogels. Int. J. Mol. Sci. 2022, 23, 15757.
31. Jiang, L.; Liu, C.; Mayumi, K.; Kato, K.; Yokoyama, H.; Ito, K. Highly stretchable and instantly recoverable slide-ring gels consisting of enzymatically synthesized polyrotaxane with low host coverage. Chem. Mater. 2018, 30, 5013-9.
32. Qin, H.; Zhang, T.; Li, N.; Cong, H. P.; Yu, S. H. Anisotropic and self-healing hydrogels with multi-responsive actuating capability. Nat. Commun. 2019, 10, 2202.
33. Yu, X.; Zheng, Y.; Zhang, H.; Wang, Y.; Fan, X.; Liu, T. Fast-recoverable, self-healable, and adhesive nanocomposite hydrogel consisting of hybrid nanoparticles for ultrasensitive strain and pressure sensing. Chem. Mater. 2021, 33, 6146-57.
34. Lei, K.; Chen, M.; Wang, X.; et al. Highly stretchable, self-healing elastomer hydrogel with universal adhesion driven by reversible cross-links and protein enhancement. J. Mater. Chem. B. 2022, 10, 9188-201.
35. Cui, H.; Zhao, Q.; Zhang, L.; Du, X. Intelligent polymer-based bioinspired actuators: from monofunction to multifunction. Adv. Intell. Syst. 2020, 2, 2000138.
36. Zheng, Q.; Xu, C.; Jiang, Z.; Zhu, M.; Chen, C.; Fu, F. Smart actuators based on external stimulus response. Front. Chem. 2021, 9, 650358.
37. Dong, Y.; Ramey-Ward, A. N.; Salaita, K. Programmable mechanically active hydrogel-based materials. Adv. Mater. 2021, 33, e2006600.
38. Han, I. K.; Chung, T.; Han, J.; Kim, Y. S. Nanocomposite hydrogel actuators hybridized with various dimensional nanomaterials for stimuli responsiveness enhancement. Nano. Converg. 2019, 6, 18.
39. He, Y.; Tang, J.; Hu, Y.; et al. Magnetic hydrogel-based flexible actuators: a comprehensive review on design, properties, and applications. Chem. Eng. J. 2023, 462, 142193.
40. Yan, Q.; Ding, R.; Zheng, H.; et al. Bio-inspired stimuli-responsive Ti3C2Tx/PNIPAM anisotropic hydrogels for high-performance actuators. Adv. Funct. Mater. 2023, 33, 2301982.
41. Liu, H.; Jia, X.; Liu, R.; et al. Multifunctional gradient hydrogel with ultrafast thermo-responsive actuation and ultrahigh conductivity. J. Mater. Chem. A. 2022, 10, 21874-83.
42. Li, M.; Zhu, F.; Ge, Y.; et al. Vulcanized layered double hydroxide nanosheet composite hydrogels as efficient near-infrared light-fueled soft actuators. ACS. Mater. Lett. 2023, 5, 1841-50.
43. Xue, P.; Valenzuela, C.; Ma, S.; et al. Highly conductive MXene/PEDOT:PSS-integrated poly(N-isopropylacrylamide) hydrogels for bioinspired somatosensory soft actuators. Adv. Funct. Mater. 2023, 33, 2214867.
44. Zuo, X.; Wang, S.; Zhou, Y.; et al. Fluorescent hydrogel actuators with simultaneous morphing- and color/brightness-changes enabled by light-activated 3D printing. Chem. Eng. J. 2022, 447, 137492.
45. Cui, X.; Liu, Z.; Zhang, B.; et al. Sponge-like, semi-interpenetrating self-sensory hydrogel for smart photothermal-responsive soft actuator with biomimetic self-diagnostic intelligence. Chem. Eng. J. 2023, 467, 143515.
46. Ma, Y.; Ma, S.; Yang, W.; et al. Sundew-inspired simultaneous actuation and adhesion/friction control for reversibly capturing objects underwater. Adv. Mater. Technol. 2019, 4, 1800467.
47. Haq, M. A.; Su, Y.; Wang, D. Mechanical properties of PNIPAM based hydrogels: a review. Mater. Sci. Eng. C. Mater. Biol. Appl. 2017, 70, 842-55.
48. Li, J. Y.; Feng, Y. H.; He, Y. T.; et al. Thermosensitive hydrogel microneedles for controlled transdermal drug delivery. Acta. Biomater. 2022, 153, 308-19.
49. Jin, Y.; Yang, T.; Ju, S.; Zhang, H.; Choi, T. Y.; Neogi, A. Thermally tunable dynamic and static elastic properties of hydrogel due to volumetric phase transition. Polymers 2020, 12, 1462.
50. Jiang, S.; Xia, L.; Ma, H.; Yang, T.; Qian, L. pH and temperature dual-responsive hydrogel actuator with bidirectional bending behavior and ultra large bending angle. Eur. Polym. J. 2023, 197, 112296.
51. Li, H.; Hai, N.; Wu, X.; Yuan, Z.; Chen, X.; Zhang, J. Thermo-hardening hydrogel actuators as self-locking grippers. Sci. China. Mater. 2024, 67, 2115-22.
52. Ni, C.; Chen, D.; Wen, X.; et al. High speed underwater hydrogel robots with programmable motions powered by light. Nat. Commun. 2023, 14, 7672.
53. Kong, X.; Li, Y.; Xu, W.; et al. Drosera-inspired dual-actuating double-layer hydrogel actuator. Macromol. Rapid. Commun. 2021, 42, e2100416.
54. Higgins, W.; Kozlovskaya, V.; Alford, A.; Ankner, J.; Kharlampieva, E. Stratified temperature-responsive multilayer hydrogels of poly(N-vinylpyrrolidone) and poly(N-vinylcaprolactam): effect of hydrogel architecture on properties. Macromolecules 2016, 49, 6953-64.
55. Le, M.; Huang, W.; Chen, K.; et al. Upper critical solution temperature polymeric drug carriers. Chem. Eng. J. 2022, 432, 134354.
56. Hua, L.; Xie, M.; Jian, Y.; Wu, B.; Chen, C.; Zhao, C. Multiple-responsive and amphibious hydrogel actuator based on asymmetric UCST-type volume phase transition. ACS. Appl. Mater. Interfaces. 2019, 11, 43641-8.
57. Li, J.; Ma, Q.; Xu, Y.; et al. Highly bidirectional bendable actuator engineered by LCST-UCST bilayer hydrogel with enhanced interface. ACS. Appl. Mater. Interfaces. 2020, 12, 55290-8.
58. Li, L.; Scheiger, J. M.; Levkin, P. A. Design and applications of photoresponsive hydrogels. Adv. Mater. 2019, 31, e1807333.
59. Yang, S.; Yang, Y.; Xia, X.; Zou, B.; Wang, B.; Zhang, Y. Biomimetic stimulus responsiveness: from materials design to device integration. Adv. Funct. Mater. 2024, 34, 2400500.
60. Guo, K.; Yang, X.; Zhou, C.; Li, C. Self-regulated reversal deformation and locomotion of structurally homogenous hydrogels subjected to constant light illumination. Nat. Commun. 2024, 15, 1694.
61. Zhu, C. N.; Li, C. Y.; Wang, H.; et al. Reconstructable gradient structures and reprogrammable 3D deformations of hydrogels with coumarin units as the photolabile crosslinks. Adv. Mater. 2021, 33, e2008057.
62. Kumar, A.; Rajamanickam, R.; Hazra, J.; Mahapatra, N. R.; Ghosh, P. Engineering the nonmorphing point of actuation for controlled drug release by hydrogel bilayer across the pH spectrum. ACS. Appl. Mater. Interfaces. 2022, 14, 56321-30.
63. Chen, H.; Tan, W.; Tong, T.; Shi, X.; Ma, S.; Zhu, G. A pH-responsive asymmetric microfluidic/chitosan device for drug release in infective bone defect treatment. Int. J. Mol. Sci. 2023, 24, 4616.
64. Su, L.; Jin, D.; Wang, Y.; et al. Modularized microrobot with lock-and-detachable modules for targeted cell delivery in bile duct. Sci. Adv. 2023, 9, eadj0883.
65. Han, Z.; Wang, P.; Mao, G.; et al. Dual pH-responsive hydrogel actuator for lipophilic drug delivery. ACS. Appl. Mater. Interfaces. 2020, 12, 12010-7.
66. Benny Mattam, L.; Bijoy, A.; Abraham Thadathil, D.; George, L.; Varghese, A. Conducting polymers: a versatile material for biomedical applications. ChemistrySelect 2022, 7, e202201765.
67. Milani, G. M.; Coutinho, I. T.; Ambrosio, F. N.; et al. Poly(acrylic acid)/polypyrrole interpenetrated network as electro-responsive hydrogel for biomedical applications. J. Appl. Polym. Sci. 2022, 139, 52091.
68. Liu, D.; Zhou, H.; Zhao, Y.; et al. A strand entangled supramolecular PANI/PAA hydrogel enabled ultra-stretchable strain sensor. Small 2022, 18, e2203258.
69. Liu, S.; Gao, G.; Xiao, Y.; Fu, J. Tough and responsive oppositely charged nanocomposite hydrogels for use as bilayer actuators assembled through interfacial electrostatic attraction. J. Mater. Chem. B. 2016, 4, 3239-46.
70. Na, H.; Kang, Y. W.; Park, C. S.; Jung, S.; Kim, H. Y.; Sun, J. Y. Hydrogel-based strong and fast actuators by electroosmotic turgor pressure. Science 2022, 376, 301-7.
71. Danmatam, N.; Nakburee, W.; Pearce, J.; Pattavarakorn, D. Smart carboxymethyl cellulose/polythiophene hydrogel for electrically driven soft actuators: Physical and thermal properties and electroactive performances. J. Appl. Polym. Sci. 2022, 139, e52904.
72. Pu, W.; Wei, F.; Yao, L.; Xie, S. A review of humidity-driven actuator: toward high response speed and practical applications. J. Mater. Sci. 2022, 57, 12202-35.
73. Lv, C.; Xia, H.; Shi, Q.; et al. Sensitively humidity-driven actuator based on photopolymerizable PEG-DA films. Adv. Mater. Interfaces. 2017, 4, 1601002.
74. Li, J.; Chee, H. L.; Chong, Y. T.; et al. Hofmeister effect mediated strong PHEMA-gelatin hydrogel actuator. ACS. Appl. Mater. Interfaces. 2022, 14, 23826-38.
75. Wang, M.; Zhou, L.; Deng, W.; et al. Ultrafast response and programmable locomotion of liquid/vapor/light-driven soft multifunctional actuators. ACS. Nano. 2022, 16, 2672-81.
76. Pirahmadi, P.; Kokabi, M.; Alamdarnejad, G. Polyvinyl alcohol/chitosan/carbon nanotubes electroactive shape memory nanocomposite hydrogels. J. Appl. Polym. Sci. 2021, 138, 49995.
77. Lee, S.; Kim, M.; Choi, J.; Kim, S. Double-crosslinked reduced graphene oxide-based hydrogel actuator system with fast electro-responsive deformation and enhanced mechanical properties. Mater. Today. Chem. 2023, 29, 101434.
78. Yu, X.; Cheng, H.; Zhang, M.; Zhao, Y.; Qu, L.; Shi, G. Graphene-based smart materials. Nat. Rev. Mater. 2017, 2, 17046.
80. Ioniţă, M.; Vlăsceanu, G. M.; Watzlawek, A. A.; Voicu, S. I.; Burns, J. S.; Iovu, H. Graphene and functionalized graphene: extraordinary prospects for nanobiocomposite materials. Compos. Part. B. Eng. 2017, 121, 34-57.
81. Yang, C.; Liu, Z.; Chen, C.; et al. Reduced graphene oxide-containing smart hydrogels with excellent electro-response and mechanical properties for soft actuators. ACS. Appl. Mater. Interfaces. 2017, 9, 15758-67.
82. Duan, J.; Liu, F.; Kong, Y.; et al. Homogeneous chitosan/graphene oxide nanocomposite hydrogel-based actuator driven by efficient photothermally induced water gradients. ACS. Appl. Nano. Mater. 2020, 3, 1002-9.
83. Zhao, Q.; Liang, Y.; Ren, L.; Yu, Z.; Zhang, Z.; Ren, L. Bionic intelligent hydrogel actuators with multimodal deformation and locomotion. Nano. Energy. 2018, 51, 621-31.
84. Song, P.; Qin, H.; Gao, H. L.; Cong, H. P.; Yu, S. H. Self-healing and superstretchable conductors from hierarchical nanowire assemblies. Nat. Commun. 2018, 9, 2786.
85. Zhang, H.; Zeng, H.; Eklund, A.; Guo, H.; Priimagi, A.; Ikkala, O. Feedback-controlled hydrogels with homeostatic oscillations and dissipative signal transduction. Nat. Nanotechnol. 2022, 17, 1303-10.
86. Han, B.; Gao, Y.; Zhang, Y.; et al. Multi-field-coupling energy conversion for flexible manipulation of graphene-based soft robots. Nano. Energy. 2020, 71, 104578.
87. Liu, J.; Miao, J.; Zhang, Z.; Liu, Z.; Yu, Y. Programmable shape deformation actuated bilayer hydrogel based on mixed metal ions. Eur. Polym. J. 2022, 175, 111375.
88. Lu, H.; Wu, B.; Yang, X.; et al. Actuating supramolecular shape memorized hydrogel toward programmable shape deformation. Small 2020, 16, e2005461.
89. Zhang, Y.; An, R.; Han, L.; Wang, X.; Shi, L.; Ran, R. Novel self-healing, shape-memory, tunable double-layer actuators based on semi-IPN and physical double-network hydrogels. Macro. Mater. Eng. 2018, 303, 1800505.
90. Wei, S.; Lu, W.; Le, X.; et al. Bioinspired synergistic fluorescence-color-switchable polymeric hydrogel actuators. Angew. Chem. Int. Ed. Engl. 2019, 58, 16243-51.
91. Kim, Y. S.; Liu, M.; Ishida, Y.; et al. Thermoresponsive actuation enabled by permittivity switching in an electrostatically anisotropic hydrogel. Nat. Mater. 2015, 14, 1002-7.
92. Li, M.; Wang, X.; Dong, B.; Sitti, M. In-air fast response and high speed jumping and rolling of a light-driven hydrogel actuator. Nat. Commun. 2020, 11, 3988.
93. Yao, X.; Chen, H.; Qin, H.; Wu, Q. H.; Cong, H. P.; Yu, S. H. Solvent-adaptive hydrogels with lamellar confinement cellular structure for programmable multimodal locomotion. Nat. Commun. 2024, 15, 9254.
94. Naguib, M.; Mochalin, V. N.; Barsoum, M. W.; Gogotsi, Y. 25th anniversary article: MXenes: a new family of two-dimensional materials. Adv. Mater. 2014, 26, 992-1005.
95. Liao, H.; Guo, X.; Wan, P.; Yu, G. Conductive MXene nanocomposite organohydrogel for flexible, healable, low-temperature tolerant strain sensors. Adv. Funct. Mater. 2019, 29, 1904507.
96. Zhang, Y. Z.; Lee, K. H.; Anjum, D. H.; et al. MXenes stretch hydrogel sensor performance to new limits. Sci. Adv. 2018, 4, eaat0098.
97. Li, X.; He, L.; Li, Y.; et al. Healable, degradable, and conductive MXene nanocomposite hydrogel for multifunctional epidermal sensors. ACS. Nano. 2021, 15, 7765-73.
98. Chae, A.; Murali, G.; Lee, S.; et al. Highly oxidation-resistant and self-healable MXene-based hydrogels for wearable strain sensor. Adv. Funct. Mater. 2023, 33, 2213382.
99. Rafieerad, A.; Sequiera, G. L.; Yan, W.; Kaur, P.; Amiri, A.; Dhingra, S. Sweet-MXene hydrogel with mixed-dimensional components for biomedical applications. J. Mech. Behav. Biomed. Mater. 2020, 101, 103440.
100. Tao, N.; Zhang, D.; Li, X.; et al. Near-infrared light-responsive hydrogels via peroxide-decorated MXene-initiated polymerization. Chem. Sci. 2019, 10, 10765-71.
101. Zhang, P.; Yang, X. J.; Li, P.; Zhao, Y.; Niu, Q. J. Fabrication of novel MXene (Ti3C2)/polyacrylamide nanocomposite hydrogels with enhanced mechanical and drug release properties. Soft. Matter. 2020, 16, 162-9.
102. Li, Y.; Tian, Z.; Li, C.; Li, Z.; Yu, Z.; Yang, D. Bionic light-responsive hydrogel actuators with multiple-freedom motions in water environments. Nano. Energy. 2024, 130, 110130.
103. Shang, M.; Ma, S.; Ma, J.; Guo, L.; Liu, C.; Xu, X. Somatosensory actuators based on light-responsive anisotropic hydrogel for storage encryption of information systems. Chem. Eng. J. 2024, 496, 153895.
104. Yang, L.; Cui, J.; Zhang, L.; Xu, X.; Chen, X.; Sun, D. A moisture-driven actuator based on polydopamine-modified MXene/bacterial cellulose nanofiber composite film. Adv. Funct. Mater. 2021, 31, 2101378.
105. Zhang, W.; Jin, K.; Ren, Z.; et al. High-performance MXene/carbon nanotube electrochemical actuators for biomimetic soft robotic applications. Adv. Funct. Mater. 2024, 34, 2408496.
106. Ma, S.; Xue, P.; Valenzuela, C.; et al. Highly stretchable and conductive MXene-encapsulated liquid metal hydrogels for bioinspired self-sensing soft actuators. Adv. Funct. Mater. 2024, 34, 2309899.
107. Chen, L.; Wei, X.; Sun, Y.; et al. A bamboo/PNIPAM composite hydrogel assembly for both programmable and remotely-controlled light-responsive biomimetic actuations. Chem. Eng. J. 2022, 446, 137072.
108. Luo, R.; Wu, J.; Dinh, N.; Chen, C. Gradient porous elastic hydrogels with shape-memory property and anisotropic responses for programmable locomotion. Adv. Funct. Mater. 2015, 25, 7272-9.
109. Depa, K.; Strachota, A.; Šlouf, M.; Brus, J.; Cimrová, V. Synthesis of conductive doubly filled poly(N-isopropylacrylamide)-polyaniline-SiO2 hydrogels. Sens. Actuators. B. Chem. 2017, 244, 616-34.
110. Li, Y.; Liu, L.; Xu, H.; Cheng, Z.; Yan, J.; Xie, X. M. Biomimetic gradient hydrogel actuators with ultrafast thermo-responsiveness and high strength. ACS. Appl. Mater. Interfaces. 2022, 14, 32541-50.
111. Wang, S.; Yu, L.; Wang, S.; et al. Strong, tough, ionic conductive, and freezing-tolerant all-natural hydrogel enabled by cellulose-bentonite coordination interactions. Nat. Commun. 2022, 13, 3408.
112. Gevorkian, A.; Morozova, S. M.; Kheiri, S.; et al. Actuation of three-dimensional-printed nanocolloidal hydrogel with structural anisotropy. Adv. Funct. Mater. 2021, 31, 2010743.
113. Yang, B.; Zhang, S.; Wang, P.; Liu, C.; Zhu, Y. Robust and rapid responsive organic-inorganic hybrid bilayer hydrogel actuators with silicon nanoparticles as the cross-linker. Polymer 2021, 228, 123863.
114. Duan, S.; Hua, M.; Zhang, C. W.; et al. Noncovalent aggregation for diverse properties in hydrogels: a comprehensive review. Chem. Rev. 2025.
115. Ge, G.; Zhang, Y. Z.; Zhang, W.; et al. Ti3C2Tx MXene-activated fast gelation of stretchable and self-healing hydrogels: a molecular approach. ACS. Nano. 2021, 15, 2698-706.
116. Xu, C.; Yu, X.; Liu, Y.; Zhang, X.; Liu, S. Versatile graphene oxide hybrid supramolecular hydrogel driven by host–guest interaction showing excellent mechanical and sensing properties and photothermal responsiveness. ACS. Appl. Polym. Mater. 2023, 5, 7375-89.
117. Cheng, F. M.; Chen, H. X.; Li, H. D. Recent progress on hydrogel actuators. J. Mater. Chem. B. 2021, 9, 1762-80.
118. Han, Z.; Zhang, J. Rapid-responsive hydrogel actuators with hierarchical structures: strategies and applications. ACS. Appl. Polym. Mater. 2023, 5, 4605-20.
119. Liu, H.; Liu, R.; Chen, K.; et al. Bioinspired gradient structured soft actuators: from fabrication to application. Chem. Eng. J. 2023, 461, 141966.
120. Yao, X.; Chen, H.; Qin, H.; Cong, H. P. Nanocomposite hydrogel actuators with ordered structures: from nanoscale control to macroscale deformations. Small. Methods. 2024, 8, e2300414.
121. Fan, W.; Shan, C.; Guo, H.; et al. Dual-gradient enabled ultrafast biomimetic snapping of hydrogel materials. Sci. Adv. 2019, 5, eaav7174.
122. Ying, Z.; Wang, Q.; Xie, J.; Li, B.; Lin, X.; Hui, S. Novel electrically-conductive electro-responsive hydrogels for smart actuators with a carbon-nanotube-enriched three-dimensional conductive network and a physical-phase-type three-dimensional interpenetrating network. J. Mater. Chem. C. 2020, 8, 4192-205.
123. Gregg, A.; De Volder, M. F. L.; Baumberg, J. J. Light-actuated anisotropic microactuators from CNT/hydrogel nanocomposites. Adv. Opt. Mater. 2022, 10, 2200180.
124. Chen, W.; Zhang, Z.; Kouwer, P. H. J. Magnetically driven hierarchical alignment in biomimetic fibrous hydrogels. Small 2022, 18, e2203033.
125. Yu, X.; Cheng, Y.; Zhang, H.; et al. Dorsoventral gradient hydrogel fiber actuators visualized by AIEgen-conjugated nanoparticles. Nano. Today. 2022, 44, 101502.
126. Zheng, Y.; Huang, H.; Yu, J.; Hu, Z.; Wang, Y. Highly stretchable and strong poly (vinyl alcohol)-based hydrogel for reprogrammable actuator applications. Chem. Eng. J. 2023, 454, 140054.
127. Xu, G.; Ding, Z.; Lu, Q.; et al. Electric field-driven building blocks for introducing multiple gradients to hydrogels. Protein. Cell. 2020, 11, 267-85.
128. Zhu, Q. L.; Dai, C. F.; Wagner, D.; et al. Distributed electric field induces orientations of nanosheets to prepare hydrogels with elaborate ordered structures and programmed deformations. Adv. Mater. 2020, 32, e2005567.
129. Zhai, Y.; Gong, C.; Chen, J.; Chang, C. Magnetic-field induced asymmetric hydrogel fibers for tough actuators with programmable deformation. Chem. Eng. J. 2023, 477, 147088.
130. Odent, J.; Vanderstappen, S.; Toncheva, A.; et al. Hierarchical chemomechanical encoding of multi-responsive hydrogel actuators via 3D printing. J. Mater. Chem. A. 2019, 7, 15395-403.
131. Chen, Z.; Chen, Y.; Chen, C.; Zheng, X.; Li, H.; Liu, H. Dual-gradient PNIPAM-based hydrogel capable of rapid response and tunable actuation. Chem. Eng. J. 2021, 424, 130562.
132. Yang, Y.; Tan, Y.; Wang, X.; et al. Photothermal nanocomposite hydrogel actuator with electric-field-induced gradient and oriented structure. ACS. Appl. Mater. Interfaces. 2018, 10, 7688-92.
133. Zhu, Q. L.; Dai, C. F.; Wagner, D.; et al. Patterned electrode assisted one-step fabrication of biomimetic morphing hydrogels with sophisticated anisotropic structures. Adv. Sci. 2021, 8, e2102353.
134. Xue, P.; Bisoyi, H. K.; Chen, Y.; et al. Near-infrared light-driven shape-morphing of programmable anisotropic hydrogels enabled by MXene nanosheets. Angew. Chem. Int. Ed. Engl. 2021, 60, 3390-6.
135. He, Z.; Zhou, Z.; Yuan, W. Highly adhesive, stretchable, and antifreezing hydrogel with excellent mechanical properties for sensitive motion sensors and temperature-/humidity-driven actuators. ACS. Appl. Mater. Interfaces. 2022, 14, 38205-15.
136. Lin, J.; Han, Y.; Cui, Y.; Zhao, W.; Chang, C. Ionic coordination strengthening of temperature-driven gradient hydrogel actuators with rapid responsiveness. Compos. Part. B. Eng. 2022, 245, 110210.
137. Bi, Y.; Du, X.; He, P.; Wang, C.; Liu, C.; Guo, W. Smart bilayer polyacrylamide/DNA hybrid hydrogel film actuators exhibiting programmable responsive and reversible macroscopic shape deformations. Small 2020, 16, e1906998.
138. Abdolahi, J.; Baghani, M.; Arbabi, N.; Mazaheri, H. Finite bending of a temperature-sensitive hydrogel tri-layer: an analytical and finite element analysis. Compos. Struct. 2017, 164, 219-28.
139. Chen, T.; Bakhshi, H.; Liu, L.; Ji, J.; Agarwal, S. Combining 3D printing with electrospinning for rapid response and enhanced designability of hydrogel actuators. Adv. Funct. Mater. 2018, 28, 1800514.
140. Gregg, A.; De, Volder. M.; Baumberg, J. J. Kinetics of light-responsive CNT/PNIPAM hydrogel microactuators. Small 2024, 20, e2305034.
141. Ma, C.; Li, T.; Zhao, Q.; et al. Supramolecular Lego assembly towards three-dimensional multi-responsive hydrogels. Adv. Mater. 2014, 26, 5665-9.
142. Cheng, Y.; Ren, K.; Huang, C.; Wei, J. Self-healing graphene oxide-based nanocomposite hydrogels serve as near-infrared light-driven valves. Sens. Actuators. B. Chem. 2019, 298, 126908.
143. Wei, X.; Wu, Q.; Chen, L.; et al. Remotely controlled light/electric/magnetic multiresponsive hydrogel for fast actuations. ACS. Appl. Mater. Interfaces. 2023, 15, 10030-43.
144. Sun, Z.; Song, C.; Zhou, J.; et al. Rapid photothermal responsive conductive MXene nanocomposite hydrogels for soft manipulators and sensitive strain sensors. Macromol. Rapid. Commun. 2021, 42, e2100499.
145. Wang, R.; Zhang, Y.; Lu, W.; et al. Bio-inspired structure-editing fluorescent hydrogel actuators for environment-interactive information encryption. Angew. Chem. Int. Ed. Engl. 2023, 62, e202300417.
146. Zhang, X.; Xue, P.; Yang, X.; et al. Near-infrared light-driven shape-programmable hydrogel actuators loaded with metal-organic frameworks. ACS. Appl. Mater. Interfaces. 2022, 14, 11834-41.
147. Li, M.; Bae, J. Programmable dual-responsive actuation of single-hydrogel-based bilayer actuators by photothermal and skin layer effects with graphene oxides. Adv. Mater. Interfaces. 2023, 10, 2300169.
148. Peng, X.; Liu, T.; Zhang, Q.; Shang, C.; Bai, Q.; Wang, H. Surface patterning of hydrogels for programmable and complex shape deformations by ion inkjet printing. Adv. Funct. Mater. 2017, 27, 1701962.
149. Basu, A.; Saha, A.; Goodman, C.; Shafranek, R. T.; Nelson, A. Catalytically initiated gel-in-gel printing of composite hydrogels. ACS. Appl. Mater. Interfaces. 2017, 9, 40898-904.
150. Zhang, M.; Pal, A.; Zheng, Z.; Gardi, G.; Yildiz, E.; Sitti, M. Hydrogel muscles powering reconfigurable micro-metastructures with wide-spectrum programmability. Nat. Mater. 2023, 22, 1243-52.
151. Qin, J.; Feng, P.; Wang, Y.; Du, X.; Song, B. Nanofibrous actuator with an alignment gradient for millisecond-responsive, multidirectional, multimodal, and multidimensional large deformation. ACS. Appl. Mater. Interfaces. 2020, 12, 46719-32.
152. Zhou, M. X.; Jin, F.; Wang, J. Y.; Dong, X. Z.; Liu, J.; Zheng, M. L. Dynamic color-switching of hydrogel micropillar array under ethanol vapor for optical encryption. Small 2023, 19, e2304384.
153. Wang, R.; Yuan, C.; Cheng, J.; et al. Direct 4D printing of ceramics driven by hydrogel dehydration. Nat. Commun. 2024, 15, 758.
154. Gladman, A. S.; Matsumoto, E. A.; Nuzzo, R. G.; Mahadevan, L.; Lewis, J. A. Biomimetic 4D printing. Nat. Mater. 2016, 15, 413-8.
155. Li, M.; Yuan, L.; Liu, Y.; et al. Bioinspired light-driven photonic crystal actuator with MXene-hydrogel muscle. Cell. Rep. Phys. Sci. 2022, 3, 100915.
156. Liu, H.; Du, C.; Liao, L.; et al. Approaching intrinsic dynamics of MXenes hybrid hydrogel for 3D printed multimodal intelligent devices with ultrahigh superelasticity and temperature sensitivity. Nat. Commun. 2022, 13, 3420.
157. Li, K.; Zhao, J.; Zhussupbekova, A.; et al. 4D printing of MXene hydrogels for high-efficiency pseudocapacitive energy storage. Nat. Commun. 2022, 13, 6884.
158. Fontana-Escartín, A.; Lanzalaco, S.; Bertran, O.; Aradilla, D.; Alemán, C. Aqueous alginate/MXene inks for 3D printable biomedical devices. Colloids. Surf. A. Physicochem. Eng. Asp. 2023, 671, 131632.
159. Pantula, A.; Datta, B.; Shi, Y.; et al. Untethered unidirectionally crawling gels driven by asymmetry in contact forces. Sci. Robot. 2022, 7, eadd2903.
160. Ma, C.; Le, X.; Tang, X.; et al. A multiresponsive anisotropic hydrogel with macroscopic 3D complex deformations. Adv. Funct. Mater. 2016, 26, 8670-6.
161. Zhang, M.; Lee, Y.; Zheng, Z.; et al. Micro- and nanofabrication of dynamic hydrogels with multichannel information. Nat. Commun. 2023, 14, 8208.
162. Ni, C.; Chen, D.; Yin, Y.; et al. Shape memory polymer with programmable recovery onset. Nature 2023, 622, 748-53.
163. Li, J.; Cao, J.; Bian, R.; et al. Multimaterial cryogenic printing of three-dimensional soft hydrogel machines. Nat. Commun. 2025, 16, 185.
164. Dhand, A. P.; Davidson, M. D.; Burdick, J. A. Lithography-based 3D printing of hydrogels. Nat. Rev. Bioeng. 2025, 3, 108-25.
165. Zhang, A.; Wang, F.; Chen, L.; et al. 3D printing hydrogels for actuators: a review. Chin. Chem. Lett. 2021, 32, 2923-32.
166. Wang, J.; Zhang, M.; Han, S.; Zhu, L.; Jia, X. Multiple-stimuli-responsive multicolor luminescent self-healing hydrogel and application in information encryption and bioinspired camouflage. J. Mater. Chem. C. 2022, 10, 15565-72.
167. Gao, Q.; Pan, P.; Shan, G.; Du, M. Bioinspired stimuli-responsive hydrogel with reversible switching and fluorescence behavior served as light-controlled soft actuators. Macromol. Mater. Eng. 2021, 306, 2100379.
168. Li, S.; Yang, H.; Chen, G.; et al. 4D printing of biomimetic anisotropic self-sensing hydrogel actuators. Chem. Eng. J. 2023, 473, 145444.
169. Xiang, C.; Ning, H.; Hu, N.; et al. A bioinspired smart adhesion actuator with fast-driving and self-sensing capability. Adv. Mater. Technol. 2023, 8, 2201715.
170. Wang, J.; Chen, Y.; Wang, J.; et al. A self-healing artificial muscle was realized by fitting the electrode membrane with the self-healing actuating membrane with a folded structure. Smart. Mater. Struct. 2024, 33, 015029.
171. Yang, C.; Su, F.; Xu, Y.; et al. pH oscillator-driven jellyfish-like hydrogel actuator with dissipative synergy between deformation and fluorescence color change. ACS. Macro. Lett. 2022, 11, 347-53.
172. Xie, J.; Wei, S.; Lu, W.; et al. Environment-interactive programmable deformation of electronically innervated synergistic fluorescence-color/shape changeable hydrogel actuators. Small 2023, 19, e2304204.
173. Chen, N.; Zhou, Y.; Liu, Y.; et al. Conductive photo-thermal responsive bifunctional hydrogel system with self-actuating and self-monitoring abilities. Nano. Res. 2022, 15, 7703-12.
174. Qian, C.; Li, Y.; Chen, C.; et al. A stretchable and conductive design based on multi-responsive hydrogel for self-sensing actuators. Chem. Eng. J. 2023, 454, 140263.
175. Wang, X.; Xue, P.; Ma, S.; Gong, Y.; Xu, X. Polydopamine-modified MXene-integrated poly(N-isopropylacrylamide) to construct ultrafast photoresponsive bilayer hydrogel actuators with smart adhesion. ACS. Appl. Mater. Interfaces. 2023, 15, 49689-700.
176. Feng, X.; Wang, C.; Shang, S.; et al. Multicolor fluorescent cellulose hydrogels actuators: lanthanide-ligand metal coordination, synergetic color-changing and shape-morphing, and antibacterial activity. Chem. Eng. J. 2022, 450, 138356.
177. Lu, Y.; Ma, Y.; Deng, F.; et al. Gradient wood-derived hydrogel actuators constructed by an isotropic-anisotropic structure strategy with rapid thermal-response, high strength and programmable deformation. Chem. Eng. J. 2025, 504, 158903.
178. Du, J.; Ma, Q.; Wang, B.; Sun, L.; Liu, L. Hydrogel fibers for wearable sensors and soft actuators. iScience 2023, 26, 106796.
179. Lo, C.; Zhao, Y.; Kim, C.; et al. Highly stretchable self-sensing actuator based on conductive photothermally-responsive hydrogel. Mater. Today. 2021, 50, 35-43.
180. Shen, Z.; Zhu, X.; Majidi, C.; Gu, G. Cutaneous ionogel mechanoreceptors for soft machines, physiological sensing, and amputee prostheses. Adv. Mater. 2021, 33, e2102069.
181. Xiao, R.; Zhou, X.; Yang, T.; et al. Biomimetic gradient aerogel fibers for sustainable energy harvesting from human sweat via the hydrovoltaic effect. Nano. Energy. 2025, 136, 110759.
182. Hu, L.; Chee, P. L.; Sugiarto, S.; et al. Hydrogel-based flexible electronics. Adv. Mater. 2023, 35, e2205326.
183. Shintake, J.; Cacucciolo, V.; Floreano, D.; Shea, H. Soft robotic grippers. Adv. Mater. 2018, 30, e1707035.
184. Wang, Y.; Liu, D.; Wang, C.; et al. 3D printing of octopi-inspired hydrogel suckers with underwater adaptation for reversible adhesion. Chem. Eng. J. 2023, 457, 141268.
185. Ying, B.; Chen, R. Z.; Zuo, R.; Li, J.; Liu, X. An anti-freezing, ambient-stable and highly stretchable ionic skin with strong surface adhesion for wearable sensing and soft robotics. Adv. Funct. Mater. 2021, 31, 2104665.
186. Li, J.; Sun, X.; He, Z.; Hou, Y.; Wu, H.; Zhu, Y. Biomimetic turing machine: a multiscale theoretical framework for the inverse design of target space curves. J. Mech. Phys. Solids. 2025, 196, 105999.
187. Yang, X.; Zhou, Y.; Zhao, H.; et al. Morphing matter: from mechanical principles to robotic applications. Soft. Sci. 2023, 3, 38.
188. Liu, H.; Chu, H.; Yuan, H.; et al. Bioinspired multifunctional self-sensing actuated gradient hydrogel for soft-hard robot remote interaction. Nanomicro. Lett. 2024, 16, 69.
Cite This Article
How to Cite
Download Citation
Export Citation File:
Type of Import
Tips on Downloading Citation
Citation Manager File Format
Type of Import
Direct Import: When the Direct Import option is selected (the default state), a dialogue box will give you the option to Save or Open the downloaded citation data. Choosing Open will either launch your citation manager or give you a choice of applications with which to use the metadata. The Save option saves the file locally for later use.
Indirect Import: When the Indirect Import option is selected, the metadata is displayed and may be copied and pasted as needed.
About This Article
Copyright

Data & Comments
Data
0













Comments
Comments must be written in English. Spam, offensive content, impersonation, and private information will not be permitted. If any comment is reported and identified as inappropriate content by OAE staff, the comment will be removed without notice. If you have any queries or need any help, please contact us at [email protected].