



fig6
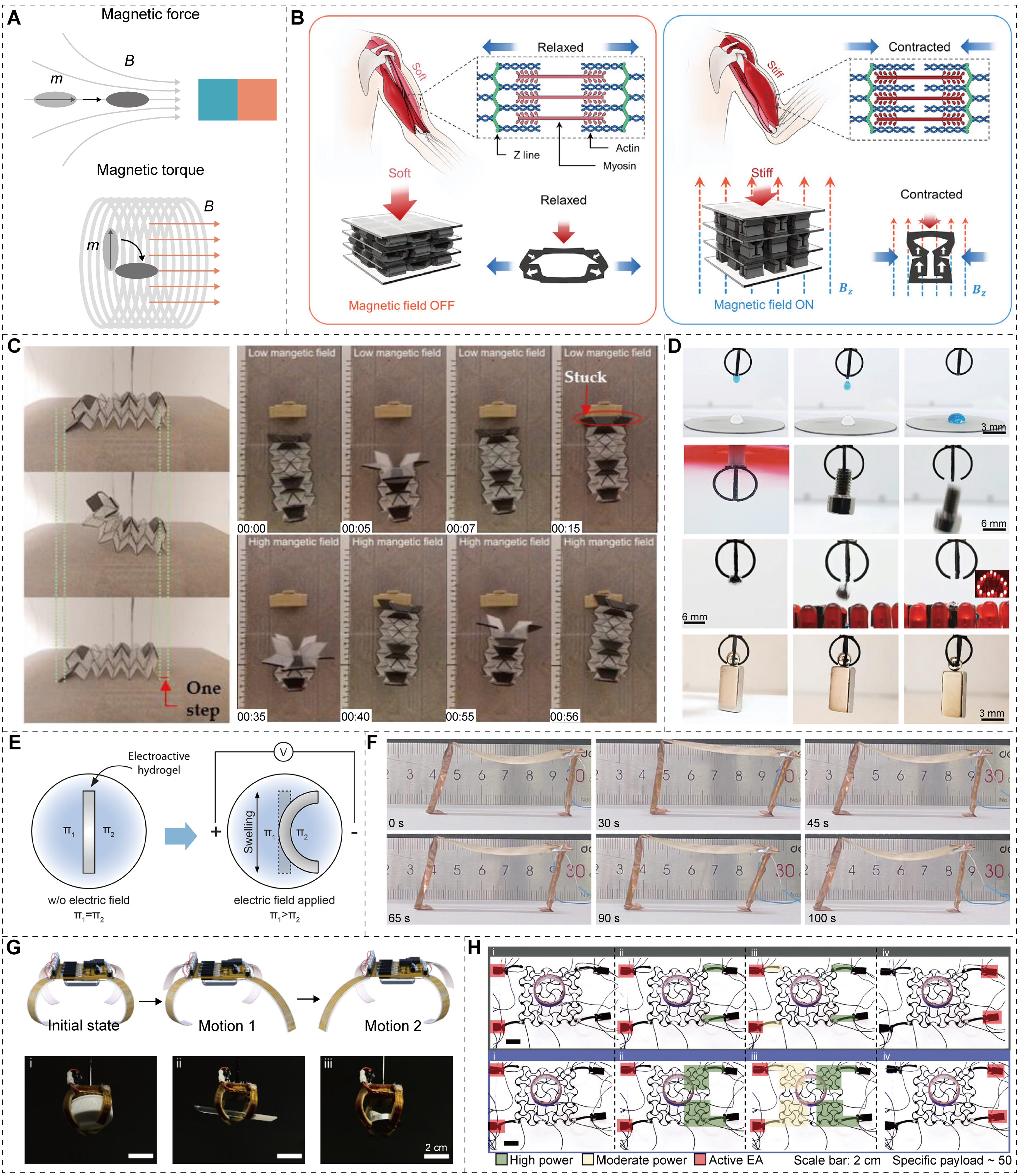
Figure 6. Magnetic and electric field actuation of 4D-printed soft microbots. (A) Magnetic field actuation mechanism. Reproduced with permission from Ref.[119]. Copyright 2022, Springer Nature; (B) DIW printed metamaterials with neodymium microparticles for magnetically programmable multistate stiffness. Reproduced with permission from Ref.[124]. Copyright 2025, Wiley-VCH; (C) UV curable ferromagnetic origami film for wireless magnetic folding and gastric delivery. Reproduced with permission from Ref.[31]. Copyright 2025, Wiley-VCH; (D) Fe3O4 polymer microgripper with embedded heaters for magnetic opening and power-free shape memory closure. Reproduced with permission from Ref.[125]. Copyright 2025, Wiley-VCH; (E) Electric field actuation mechanism. Reproduced with permission from Ref.[127]. Copyright 2018, American Chemical Society; (F) Electrothermal PEEK SMP composite actuator with printed conductive ink for reversible shape morphing. Reproduced with permission from Ref.[128]. Copyright 2025, Wiley-VCH; (G) Untethered LCE soft robot with integrated Joule heating for grasping and obstacle traversal. Reproduced with permission from Ref.[32]. Copyright 2025, American Chemical Society; (H) Self-sensing heterogeneous polymer composites with Joule heating for high load lifting and multigait crawling. Reproduced with permission from Ref.[129]. Copyright 2024, Wiley-VCH. 4D: Four-dimensional; DIW: direct ink writing; UV: ultraviolet; PEEK: poly(ether ether ketone); SMP: shape memory polymer; LCE: liquid crystal elastomer; EA: electro adhesive.





