


Convolutional neural network aided movable antenna array design for channel estimation
 0
0 Abstract
To provide reliable and high-quality services in the sixth-generation (6G) systems, movable antennas (MAs) have attracted much attention since they can use the spatial degree of freedom adequately. Compared to the traditional fixed position arrays, MAs give much better performance in multi-user and multi-antenna scenarios, which implement efficient beamforming and interference suppression in various communication cases. However, the MA array design strategy and the associated channel estimation problems require high-complexity iterative computation algorithms, making it difficult to be exploited in practical applications. In this work, a novel channel estimation method with the MA arrays is proposed based on the convolutional neural network (CNN), which considers the complexity of the algorithm and time consumption while accomplishing the optimal channel estimation. By comparing it with different benchmarks, especially for the orthogonal matching tracking, the CNN-based channel estimation method implements a better trade-off between the mean square error and the computational complexity and the designed examples are provided to verify the effectiveness of the proposed approaches.
Keywords
1. INTRODUCTION
Massive multiple-input multiple-output (MIMO) is considered as a crucial technology by employing an enormous number of antennas in the fifth-generation (5G) communication and beyond, and the independent data streams are transmitted to implement the spatial multiplexing gain[1]. Nevertheless, the associated high hardware cost and power consumption render it practically infeasible in more complex wireless communication scenarios. With the fast development of wireless communications, the tendency of various signal processing techniques is going to provide a greater degree of freedom (DoF) for the desired gain in the corresponding aspects. The core principle is to employ the spatial properties to enhance the overall performance of communication and sensing[2]. Although the advantages of the sparse arrays compared to the traditional fixed position arrays (FPAs) have been evaluated in deterministic and stochastic channel models, the non-uniform nature of terahertz channels and reconfigurable intelligent surface (RIS)[3] is investigated for movable antenna (MA)-based designs to guarantee satisfactory conditions of the transmitted signal and propagation environment.
To guarantee reliable and high-quality services for the users in the sixth-generation (6G) system, MAs have attracted more attention in the upcoming 6G networks since they can reconfigure the spatial channel environment, such as constructive or destructive path interference, path orthogonalization, and signal transmission condition through adjusting the antenna positions by flexible cables to the radio frequency (RF) chain[4]. Similar to the MAs, the fluid antennas aim to improve the inherent capabilities of channels via the optimization of antenna position based on the signal processing technologies[5,6]. Both the fluid and MAs depend on a similar operating principle and their widespread employment is implemented in modern communication applications.
Compared to the FPAs, the performance generated by the MAs has been analyzed comprehensively and it is better especially in multi-user and multi-antenna scenarios[7–11]. The beamforming tasks are realized in downlink cases[12,13], uplink cases[14,15] and MIMO[16,17], under different types of constraints. Specifically, the trade-off between the maximization of antenna array gains towards the desired directions and the minimization of sidelobe interference in undesired directions is achieved in multiple beamforming design based on the movable array[7]. Moreover, for the multiple-input single-output (MISO) system where the MA array is configured with the base station (BS), the joint optimization of the antenna location and weighting coefficients is achieved and therefore the total consumed power is minimized[18]. For the single-input multiple-output (SIMO) system, the minimization of total transmitted power[12] and the maximization of minimum achievable rate[15] are both implemented via jointly optimizing the antenna position, the transmission power of the users and the received beamforming vector. However, the above antenna array designs require iterative computation with high complexity which results in significant challenges for implementation in practical applications[19].
Recently, a series of deep learning (DL) algorithms have been proposed to develop antenna array designs based on MAs[20–22]. A joint optimization of the antenna locations and channel state functions is achieved by a deep neural network which is employed to imitate a decomposed model for received pilot so that both the estimation efficiency and computation efficiency are improved as the outcome[21]. Due to the high nonconvexity of the formulation which is to optimize the antenna position and antenna weighting coefficients simultaneously, a DL model with unsupervised training strategy is utilized to implement beamforming tasks in a multicast scenario[4]. Moreover, a multi-agent deep deterministic policy gradient (MADDPG) is developed to realize joint optimization of transmit beamforming and antenna locations in a multi-user communication system[23].
In this work, a novel MA array design, including the linear and planar arrays, based on the convolutional neural network (CNN)[24,25] is proposed to reduce the computational complexity because only simple matrix multiplications and function employment are required in mathematical computation rather than the complicated matrix inversion computation. Comparative experiments with three other methods, including linear regression (LR) model[26], least squares (LS) method[27] and orthogonal matched pursuit (OMP)[16] channel estimation method are conducted to analyze and evaluate overall channel properties. Although the OMP method combined with the regularized zero-forcing (ZF) framework is investigated to implement the MA array design with satisfactory performance, it costs much longer time in dealing with the antenna array design whose number of antennas is increased even a few[16]. Instead, CNNs give a trade-off between the mean square error (MSE) and consumed time for the array design based on MAs[28], and a novel scheme based on it is developed to achieve channel estimation in this work.
Without loss of generality, this study introduces lightweight CNNs into channel estimation for MA arrays innovative, demonstrating the three major advantages of artificial intelligence (AI) in spatial information systems[29–32]: First, CNNs can replace the traditional high-complexity iterative solvers with a single forward pass, enabling nonlinear mapping learning; Moreover, the network can be generalized to different orbital geometries such as Low Earth Orbit (LEO)/Medium Earth Orbit (MEO)/Geostationary Earth Orbit (GEO) or terrestrial High-Altitude Platform Stations (HAPS) without the need to redesign or optimize algorithms. Furthermore, the model is compact in size and fast in inference speed, meeting the dual requirements of real-time performance and lightweight design for spaceborne/airborne platforms.
This work focuses on the joint optimization of antenna position and the corresponding weighting coefficients, driven by the following three main contributions:
• First, CNNs accept the real-valued combination of antenna position vectors (APVs) and antenna weighting vectors (AWVs) and output the complex-valued channel matrices for the MA arrays.
• Moreover, joint handling of linear and planar geometries with a single model is achieved and the superiority of the MA in different dimensions is analyzed.
• Compared to the OMP method, CNNs have much higher operation speed for the MA arrays and they give relatively lower MSE for channel estimation.
The remaining part of this work is organized as follows. In Section 2, an introduction of the system model including channel model and CNN is provided. The proposed methods for the joint optimization of antenna positions and weighting coefficients are introduced in Section 3. Additionally, numerical results are presented in Section 4 and conclusions are drawn in Section 5.
2. SYSTEM MODEL
2.1. Channel model
A downlink communication scenario is considered in this section, where the BS equipped with
Taking the BS as the center, the users are randomly scattered around it, as shown in Figure 1. For simplicity, it is assumed in this process that for both linear and planar arrays the condition of far-field communication between the users and the BS is satisfied; i.e., the users are distributed within the coverage area of the BS, whose transmit power is sufficient. This work pays more attention to the users' direction with the BS, and the distance is implicitly modeled through path loss. Note that the size of MA moving regions is much smaller than that of covering area of the BS.
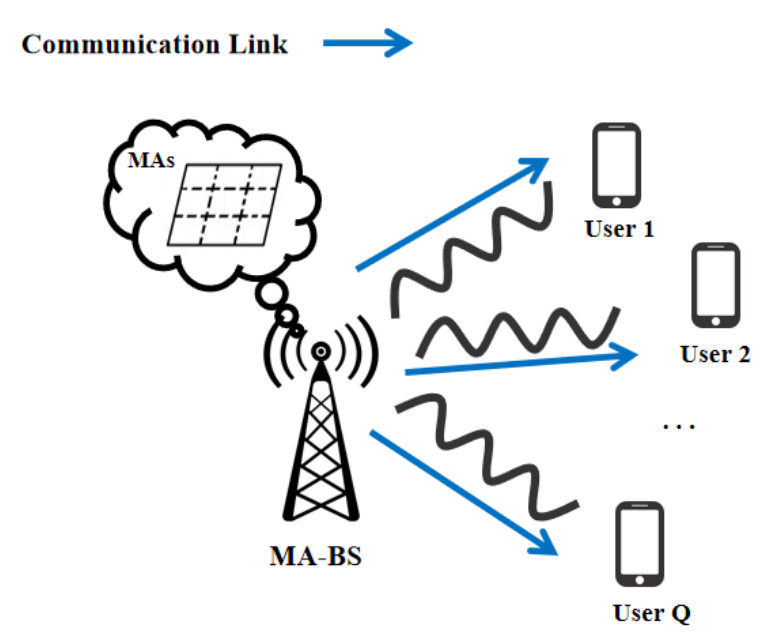
Figure 1. Illustration of the downlink scenario for the BS configured with MAs. BS: Base station; MAs: movable antennas.
In this system, the BS sends transmission signals to different users, and therefore the received signal
where
Since the MA system relies on the spatial channel model, it is assumed that there are
where
where
Since the APV and AWV are highly coupled, the optimal AWV depends instantaneously on the APV through the SV
2.2. CNN model
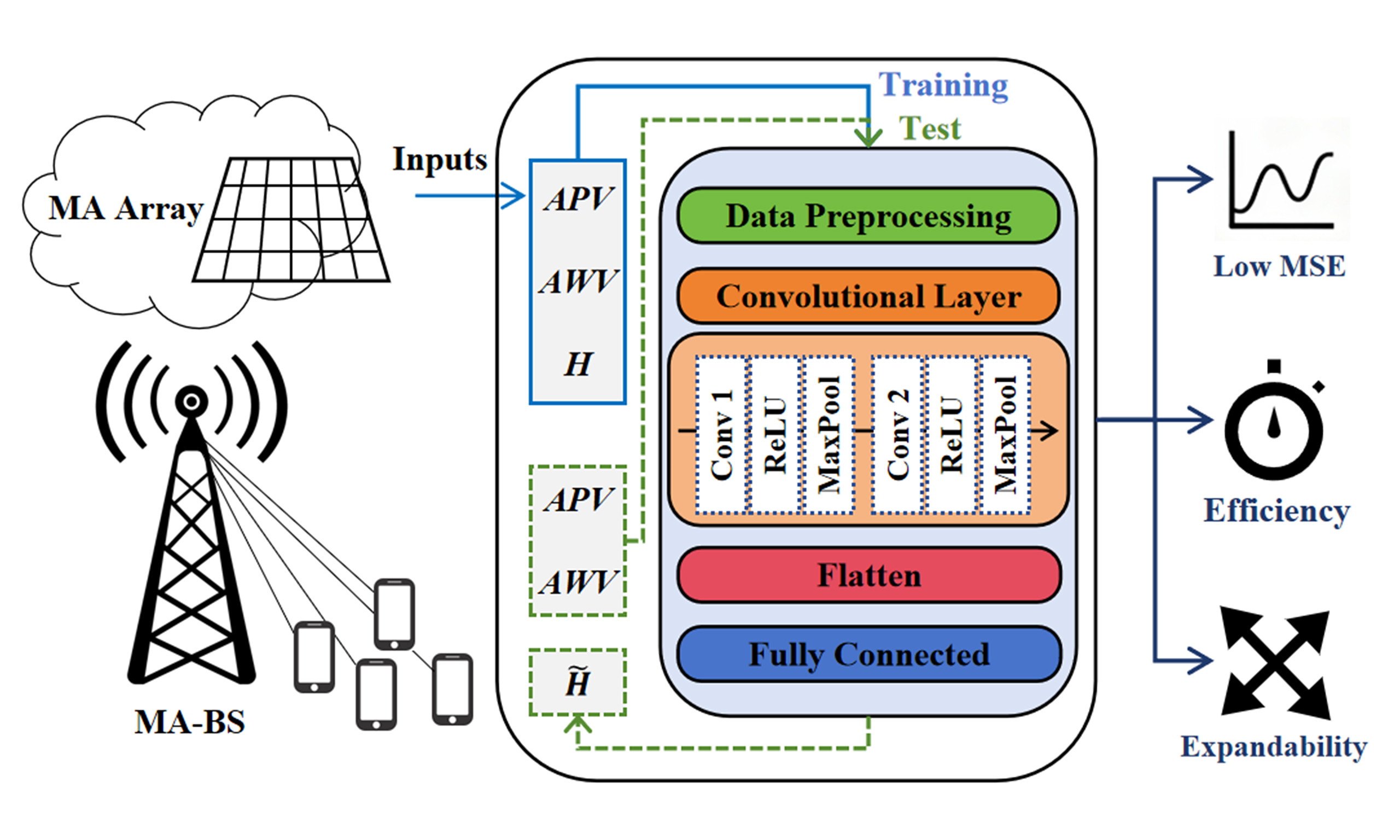
A CNN model based on a one-dimensional (1D) convolutional layer is employed to learn the nonlinear relationship among various variables in the MA wireless communication model; the lightweight structure employed in this work is intentionally shallow to ensure low-latency and low-complexity execution on edge devices. The inputs of the network include the channel matrix
As shown in Figure 2, the processed data is fed through the input layer, which enters the convolutional layer of the model, where Re{} and Im{} denote the real and imaginary parts, respectively. The model consists of two 1D convolutional layers, including Conv
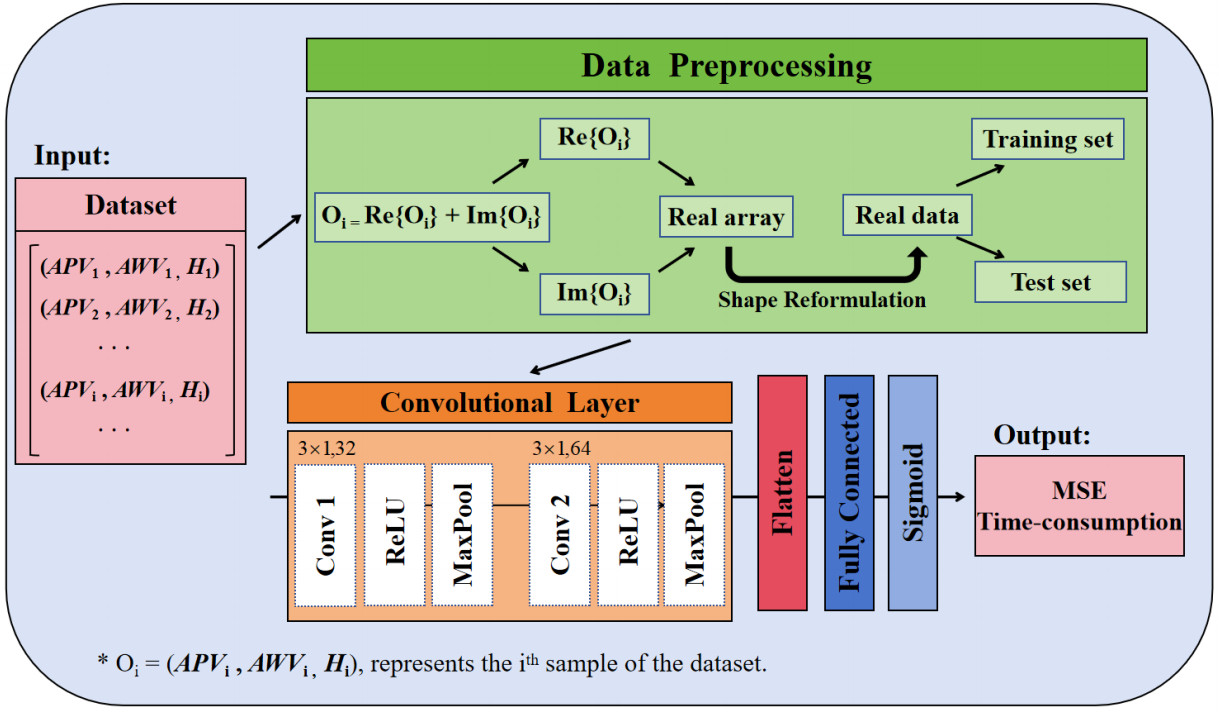
Figure 2. Illustration of the proposed CNN model. CNN: Convolutional neural network.
where max() denotes the function aiming to find the maximum value among several items. Moreover, the Conv 2 uses 64 filters while retaining the size of kernels and the activation function, so as to further extract data features, resulting in receptive field spans and allowing higher-order mutual coupling effects to be modeled. After feature extraction, the output of the convolutional layer is converted into a vector by using the flatten layer, which is convenient for the subsequent connection of the fully connected Layers. There are two fully connected layers, where the first fully connected layer consists of 128 neurons, as the Sigmoid function is selected as the activation function, given by[21]
This function maps the input to the interval (0, 1), limits gradient explosion risks while providing a stable distribution for the final linear layer and also limits the output to a certain range. Furthermore, the number of neurons in the second fully connected layer is equal to that of features in the output data and they are used to output the final prediction data.
The output layer is the final stage of the network and is responsible for generating the complete channel matrix. It produces both the real and imaginary parts simultaneously, ensuring that the full complex-valued matrix is available in a single forward pass. By using a linear activation, the layer avoids any artificial bounds on the output, allowing the network to express the entire range of channel coefficients needed for accurate estimation.
During the compilation stage, an Adam optimizer is employed to update the parameters of the model. Adam combines the advantages of two earlier gradient-based algorithms, i.e., adaptive gradient (AdaGrad) and Root Mean Square Propagation (RMSProp), while mitigating their respective drawbacks. AdaGrad accumulates the sum of squared gradients from the very first iteration; this is helpful in MA communication scenario because gradients with respect to antenna positions near the array edge are often sparse - yet the continual accumulation causes the effective learning rate to decay monotonically, eventually freezing the antenna position updates long before the channel estimation loss converges. Moreover, RMSProp counters this by replacing the ever-growing sum with an exponentially decaying average of squared gradients. Therefore, the optimizer forgets outdated curvature information and keeps the learning rate responsive to new channel samples. However, RMSProp alone can still produce biased steps during the first mini-batches, and a critical issue in wireless communication setup where early gradients are dominated by a few strong multipath components. Adam therefore adds a bias-correction term: it maintains both a decaying average of the gradients (momentum) and a decaying average of their squares, normalizing the update direction and size. This synergy allows the CNN to refine antenna position features steadily, even when the training set contains sparse spatial samples or when the channel exhibits sudden angular spreads, ensuring rapid and stable convergence toward the minimum MSE for the MA array. In other words, Adam optimizer utilizes the first-order moment estimate (mean) of the gradient to rectify the update direction of the parameter and the second-order moment estimate (variance) of the gradient to adaptively adjust the learning rate. Hence, the learning rate for each parameter is adjusted automatically, and the excellent convergence performance is demonstrated.
The loss function is selected as MSE, whose expression is given by[21]
where
The model is constructed by gradually increasing the number of filters in the convolutional layers so that the features extracted from the first convolutional layer can be further refined and strengthened in the second convolutional layer to dig deeper into the data features. Moreover, the model integrates and transforms the features extracted from the convolutional layer through the subsequent fully connected layer choosing Equation (5) as the activation function to introduce nonlinear factors, which enables the model to deal with complicated mapping relationships.
3. PROPOSED METHODS
As shown in Figure 3, a CNN-based approach to solve the channel estimation problem in MA systems is proposed in this section. The coordinate system is centered at the BS; both the linear and planar arrays, i.e., linear array antennas, move one-dimensionally along the
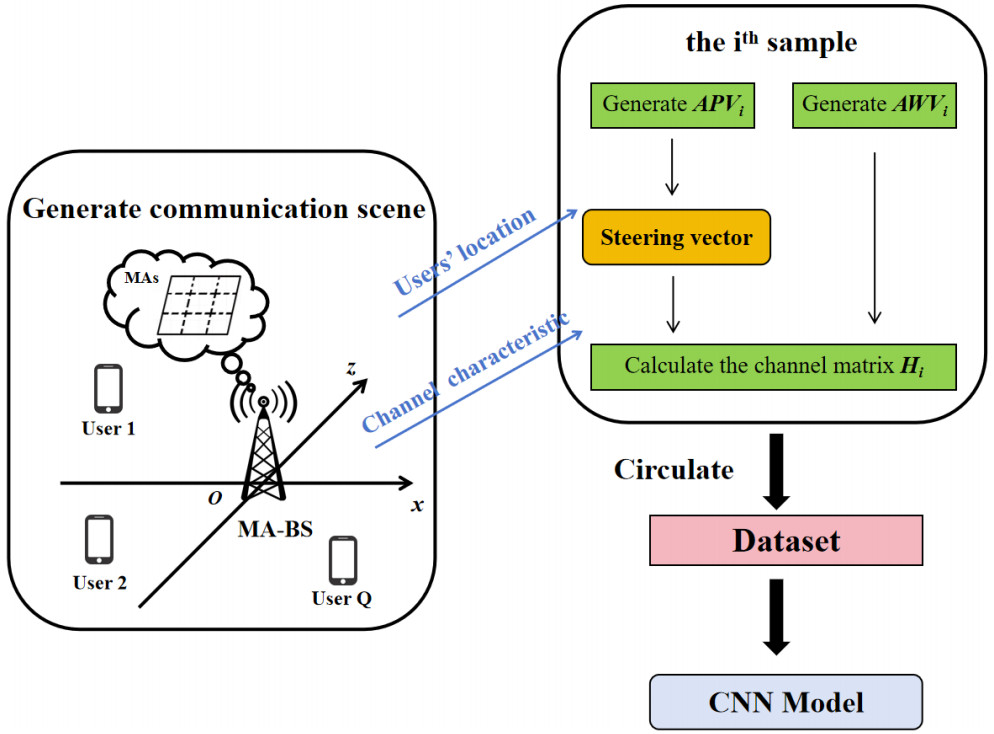
Figure 3. Demonstration of the proposed algorithm.
Several sets of antenna positions and antenna weights are randomly generated and the channel matrix under this configuration is computed as inputs and outputs, respectively, for the training of the network. The converged model outputs accurate channel matrices based on the randomness of the antenna positions and weights.
The datasets required for training and testing the model are generated. Each data consists of APV
and satisfies the constraint that the spacing between neighboring antennas is not less than
where
The antenna positions satisfying the requirements are obtained and recorded, i.e.,
where
When the dataset is obtained, the data preprocessing operation is performed. The data within the dataset is converted into CNN model input, and thus the training set and test set are divided. Afterwards, serving the channel matrix
The framework of CNN-based approach for channel estimation in MA systems is summarized in Algorithm 1.
Algorithm 1 CNN-based approach for channel estimation in MA systems. INPUT:
OUTPUT: MSE, Time-consumption
4. SIMULATION RESULTS
In this section, numerical results are provided to verify the effectiveness of the proposed method. Note that the unit for the size of MA movable region is set to
To verify the advantages of the proposed method, benchmark schemes are established as control groups, including (1) LS-based method; (2) OMP-based method; (3) LR-based method. Selecting OMP as the benchmark for comparison due to the priority in research[16], which has shown that flexible precoding based on OMP can more than double the rate in mobile antenna scenarios. In addition, the OMP method has advantages such as no offline training and interpretable results (sparse path gains directly correspond to physical propagation paths).
The computational complexity of our proposed algorithm is analyzed as follows. These expressions are derived analytically and validated by the measured runtime in the design results, i.e., CNNs: The network consists of two 1D convolution layers, and its floating-point operations (FLOPs) can be expressed as
Both linear and planar arrays are studied here to evaluate the effectiveness of antenna array design based on the MAs, and they move along the
Since the number of the users
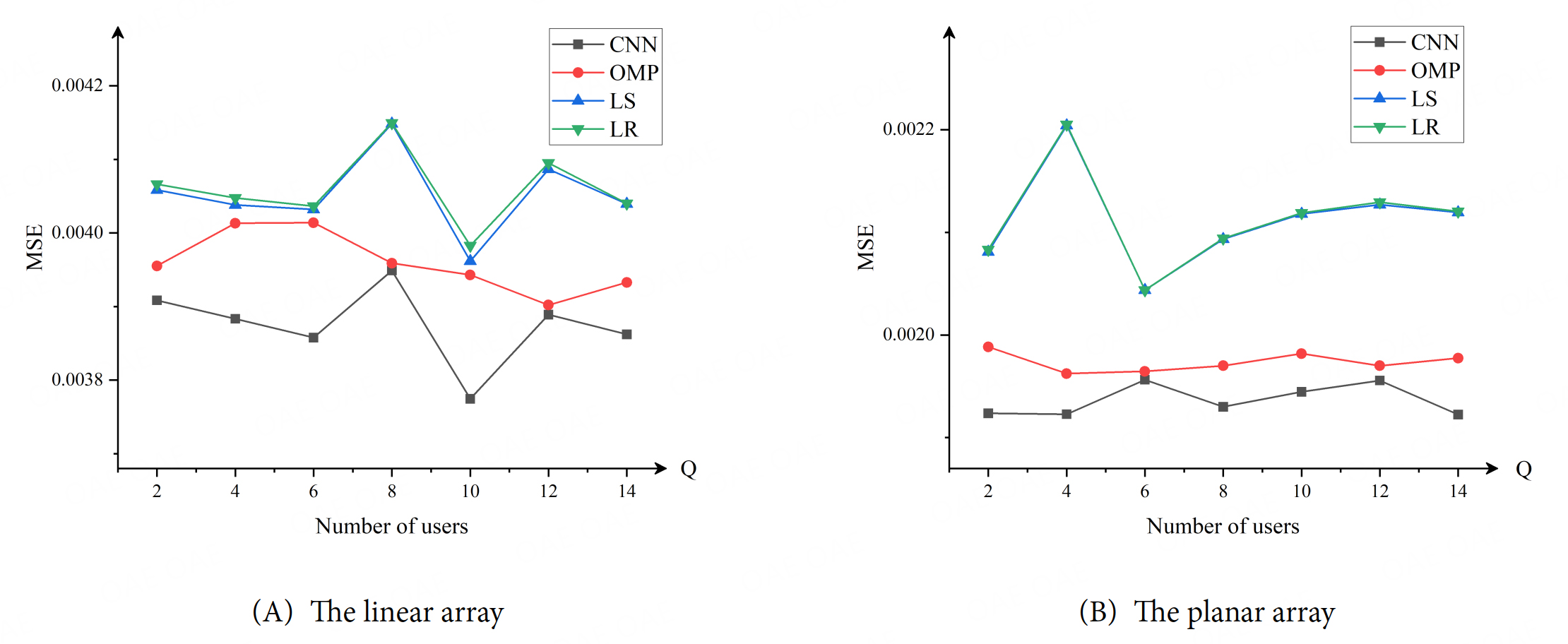
Figure 4. The MSE of channel matrix with respect to the number of users generated by the proposed method, OMP method, LS method and LR method: (A) The linear array; (B) The planar array. MSE: Mean square error; OMP: orthogonal matched pursuit; LS: least squares; LR: linear regression.
To further validate the robustness of training parameters, we conducted additional experiments. We fix the total number of samples of each training round at
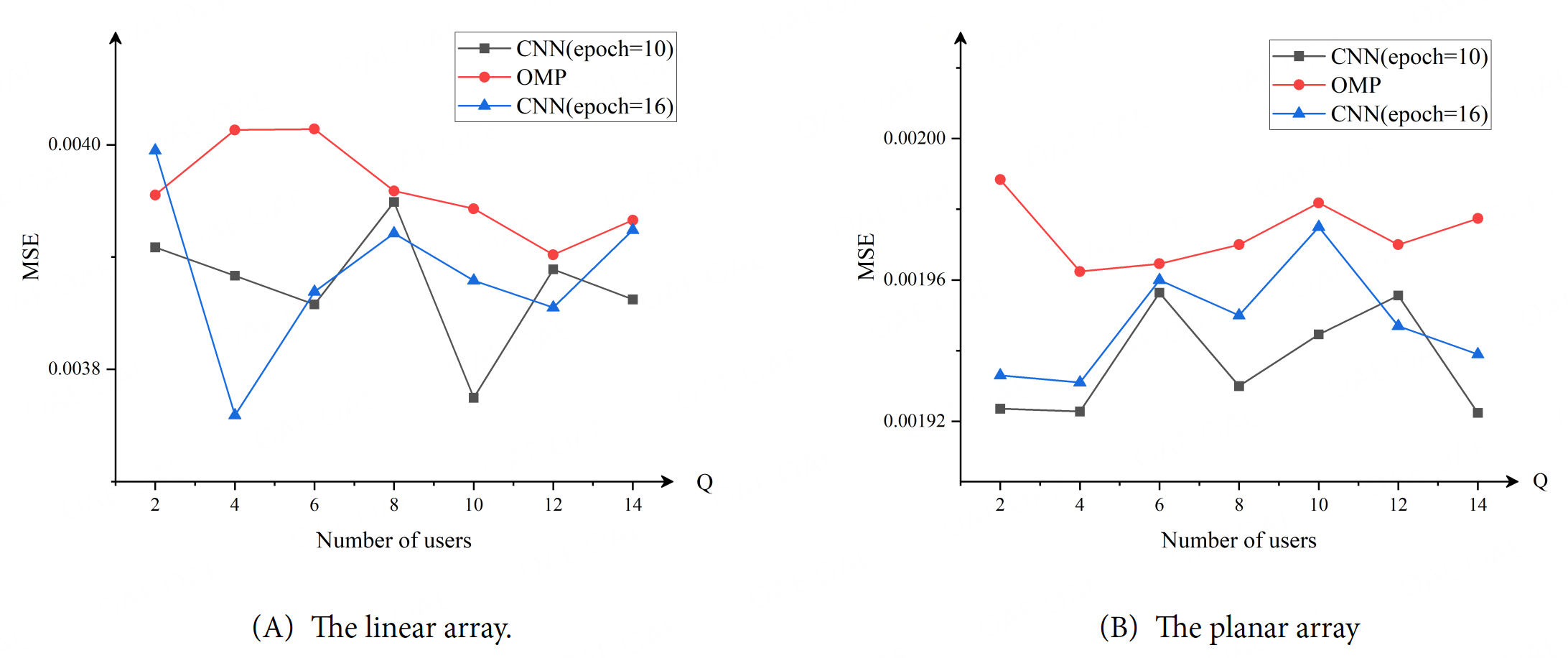
Figure 5. The MSE of channel matrix with respect to the number of users generated by the CNN method with epoch = 10, epoch = 16, and the OMP method: (A) The linear array; (B) The planar array. MSE: Mean square error; CNN: convolutional neural network; OMP: orthogonal matched pursuit.
Moreover, Figure 6 illustrates that more epochs only increase the computation time without yielding significant performance improvements, so we ultimately retain the configuration of epoch =
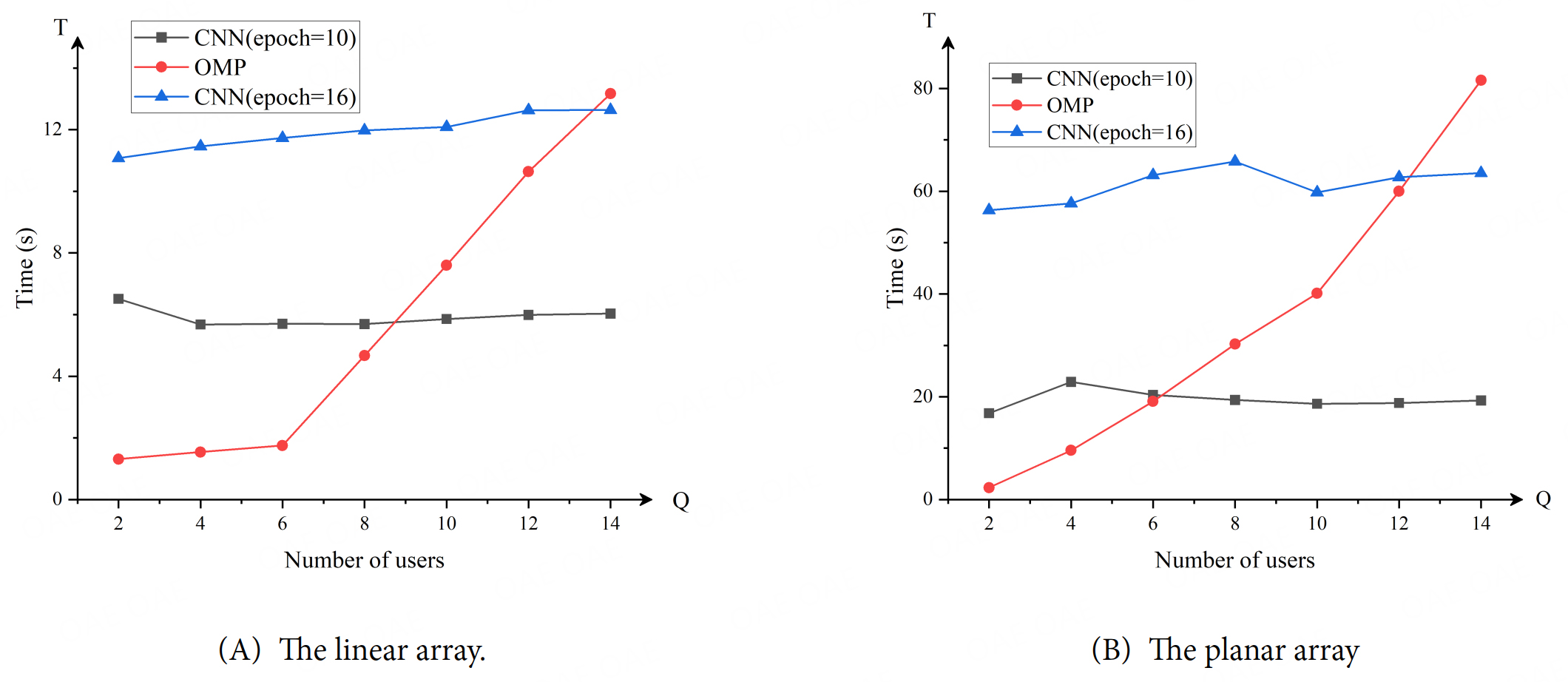
Figure 6. The consumed time with respect to the number of users generated by the CNN method with epoch = 10, epoch = 20, and OMP method: (A) The linear array; (B) The planar array. CNN: convolutional neural network; OMP: orthogonal matched pursuit.
When the number of users is not high, the consumed time with the OMP method is much shorter than that of the proposed method. With the increase of the dedicated users, the consumed time for OMP grows dramatically but the time for the proposed CNN network remains nearly unchanged. The CNN model processes the data in such a way that the convolutional kernels slide over the input data to perform the convolutional operation. When the number of users is increased, the properties and structure of the data do not change, and the number of convolutional kernels and parameters of the CNN model does not vary. Hence, the learnable parameters do not vary due to the rise in the number of users. Compared to the OMP method that gradually selects with the highest correlation coefficient to the residuals through an iterative algorithm, the CNN training convergence time is relatively constant and does not fluctuate significantly with respect to the increase in the number of users.
Although the CNN method exhibits slightly higher time consumption than OMP when the number of users is small (e.g.,
The number of paths and the size of movable region of MA are also studied in this work. The numbers of users are
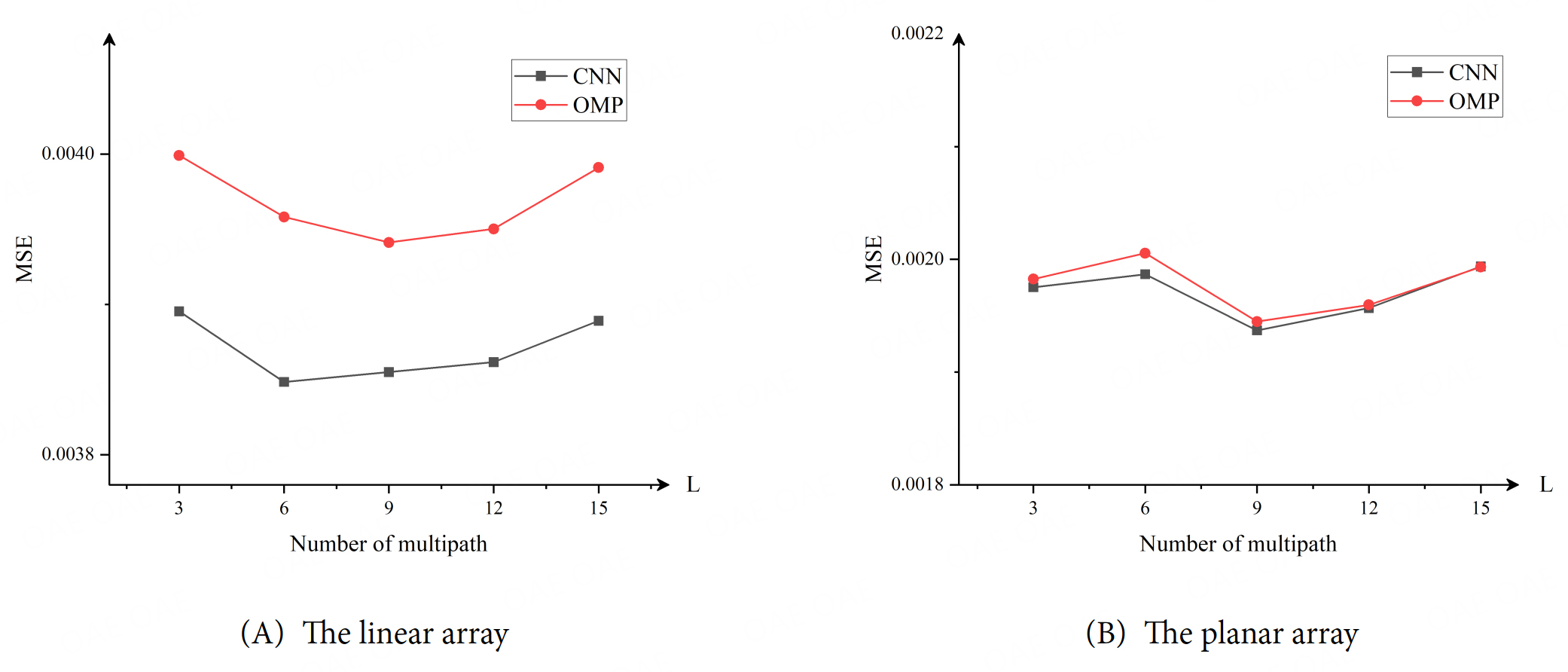
Figure 7. The MSE of channel matrix with respect to the number of multipaths generated by the proposed method and OMP method: (A) The linear array; (B) The planar array. MSE: Mean square error; OMP: orthogonal matched pursuit.
It is known that CNNs have high capability of powerful feature extraction, which is capable of learning complex features in the data. The OMP method performs channel estimation based on the sparsity of the signal, and in each iteration, OMP selects the optimum value based on the current residuals, and when the number of paths changes, the iterative process of OMP is still carried out in accordance with its convergence rules, and therefore is less sensitive to the changes in the number of paths, and similarly for the size of MA's movable region.
The size of the movable region for MA also affects the overall performance and it should be considered in this work. For the linear array, the number of users is
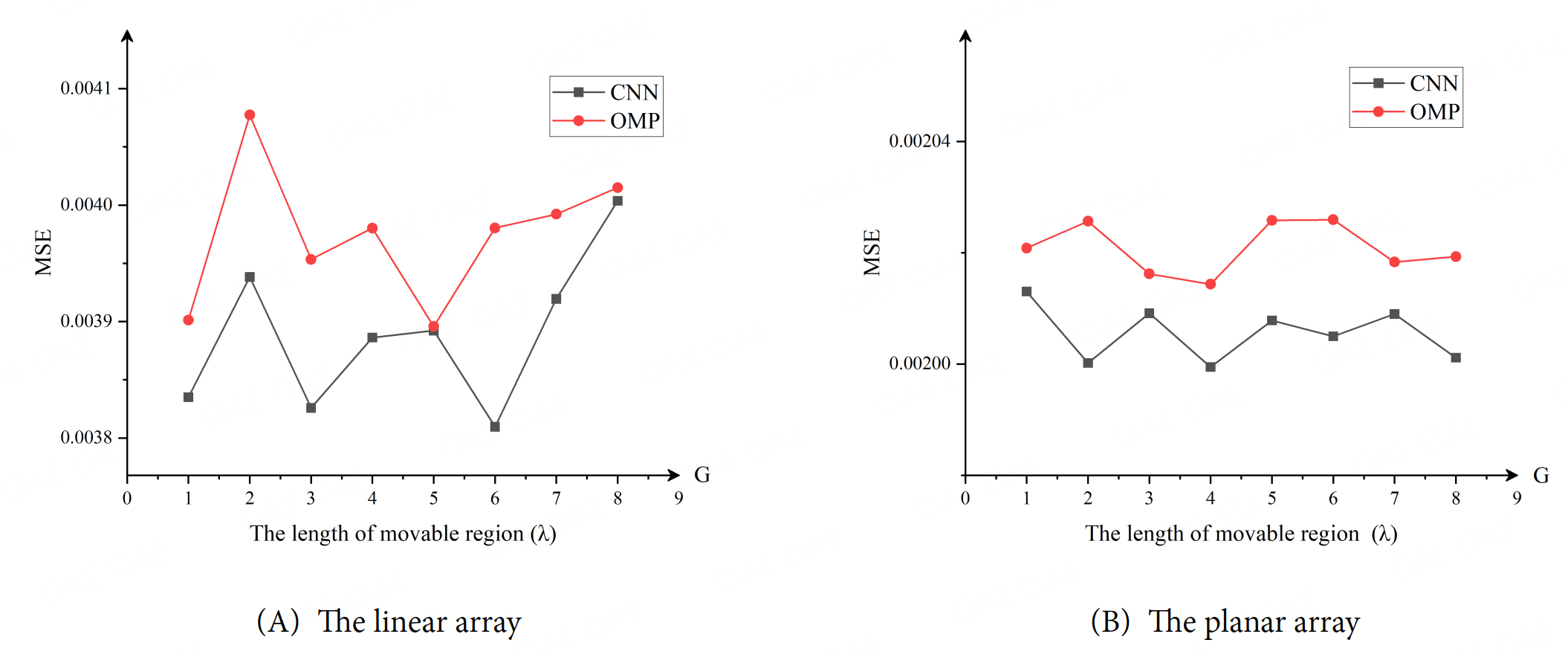
Figure 8. The MSE of channel matrix with respect to the length of each MA's movable region generated by the proposed method and OMP method: (A) The linear array; (B) The planar array. MSE: Mean square error; MA: movable antenna; OMP: orthogonal matched pursuit.
The essence of CNN's convolution operation is to identify the same features, i.e., while the size of MA's movable region changes, with respect to the spatial distribution of the channel, but the CNN focuses on extracting the essential features of the data. Thus, it is not sensitive to changes in the size of the movable region for MA.
To verify the efficiency and latency of this model, the variation of MSE with respect to the number of samples is investigated here. Using the MSE generated by the OMP method as a benchmark, Figure 9 illustrates that in both linear and planar arrays the MSE from the OMP method is lower than that of the CNN network when the number of sample points is low. However, the proposed CNN method can deal with the problem better when the number of samples is high in both types of arrays. As illustrated in Figure 9A, CNN outperforms OMP once samples exceed 200 in linear case, indicating that the network benefits from data-driven generalization; OMP accuracy saturates because it is model-based. As shown in Figure 9B, a similar crossing point is observed in the planar scenario, but more samples are required than in the linear case to achieve the same accuracy. This confirms that the convolutional approach is convergent when measurement campaigns are affordable and indicates that the minimum number of samples needed to achieve satisfactory accuracy while avoiding excessive overhead.
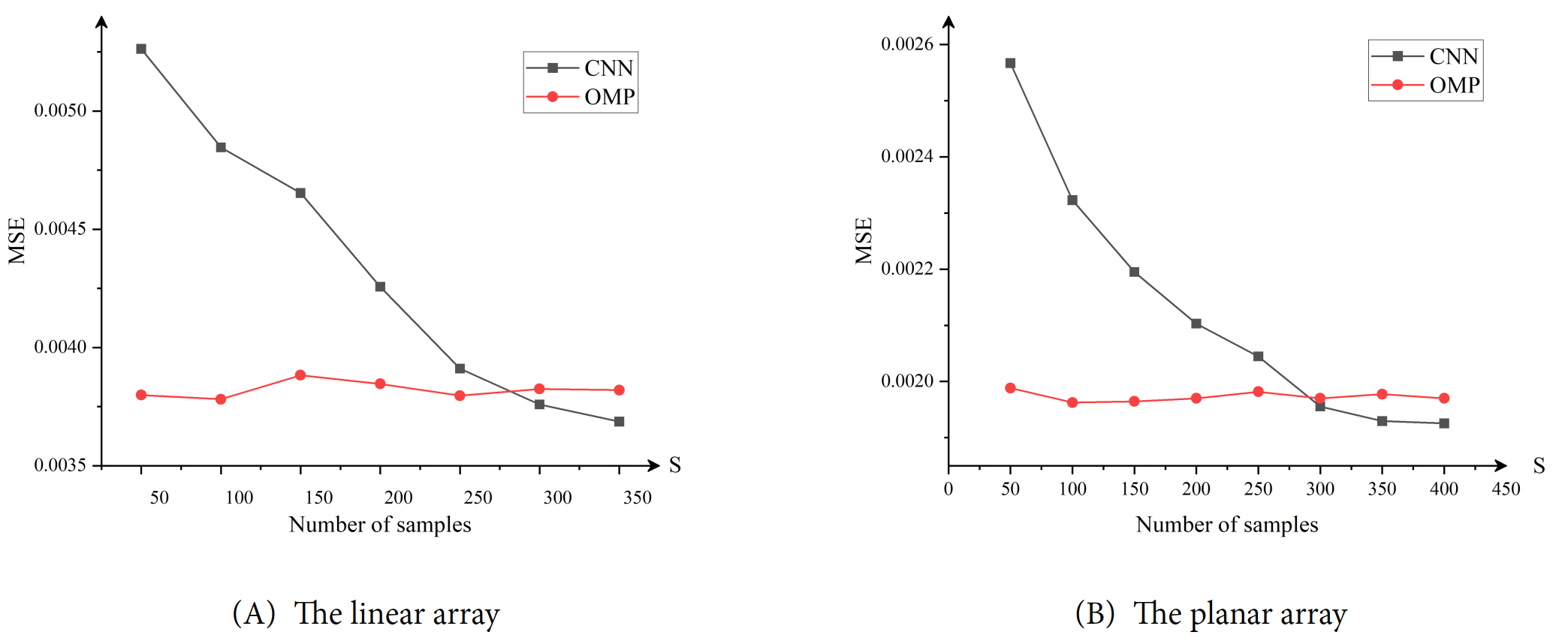
Figure 9. The MSE of channel matrix with respect to the number of the samples generated by the proposed method and OMP method: (A) The linear array; (B) The planar array. MSE: Mean square error; OMP: orthogonal matched pursuit.
Overall, the relationship between the convergence time and the number of samples can directly reflect the efficiency of the model to learn the data features because the computational resources are limited and expensive when actually training the model. Determining the minimum number of samples to meet the model performance requirements can not only avoid employing too many samples for training and increasing the data volume, but also reduce the overhead of computational resources, which is suitable for application scenarios with high real-time requirements.
5. CONCLUSIONS
Based on the inspiration of DL algorithms, a CNN-based channel estimation method is proposed for the configuration of BS that is equipped with MA arrays to deal with the complex problem of multi-data, multi-users and large computational volume. Compared with the LS method, OMP method and LR method, the proposed method not only realizes satisfactory channel estimation from the perspective of MSE, but also effectively employs the shortest computational time in a multi-user communication scenario. Design results verify the superiority of the proposed method compared to other approaches and the proposed method provides a good solution for the application of MA in real wireless communication systems.
DECLARATIONS
Authors' contributions
Wrote the main manuscript: Zhang, J.; Wang, Z.
Reviewed the manuscript: Li, S.; Jin, L.; Hu, B.; Wan, Z.; Wang, S.
Availability of data and materials
The raw data supporting the conclusions of this article will be made available by the authors upon request.
Financial support and sponsorship
This study was supported by the National Key Research and Development Program 2021YFF0900702 and the National Natural Science Foundation of China 62501547.
Conflicts of interest
All authors declared that there are no conflicts of interest.
Ethical approval and consent to participate
Not applicable.
Consent for publication
Not applicable.
Copyright
© The Author(s) 2025.
REFERENCES
1. Han, S.; Liao, Y.; Chen, S.; Liang, Y. C. Joint channel estimation for RIS-aided mmWave MIMO wireless communication systems with mixed-resolution quantization schemes. IEEE. Internet. Things. J. 2025, 12, 33756-68.
2. Lu, S.; Liu, F.; Li, Y.; Zhang, K.; Huang, H.; Zou, J. Integrated sensing and communications: recent advances and ten open challenges. IEEE. Internet. Things. J. 2022, 11, 19094-120.
3. Cheng, Q.; Zhang, L.; Dai, J. Y.; Tang, W.; Ke, J. C.; Liu, S. Reconfigurable intelligent surfaces: simplified-architecture transmitters - from theory to implementations. Proc. IEEE. 2022, 110, 1266-89.
4. Kang, J. M. Deep learning enabled multicast beamforming with movable antenna array. IEEE. Wireless. Commun. Lett. 2024, 13, 1848-52.
5. He, C.; Lu, Y.; Chen, W.; Ai, B.; Wong, K. K.; Niyato, D. Graph neural network enabled fluid antenna systems: a two-stage approach. IEEE Trans. Veh. Technol. 2025. https://discovery.ucl.ac.uk/id/eprint/10209042/1/Graph_Neural_Network_Enabled_Fluid_Antenna_Systems_A_Two-Stage_Approach.pdf. (accessed 20 Oct 2025).
6. Chen, Y.; Chen, M.; Xu, H.; Yang, Z.; Wong, K. K.; Zhang, Z. Joint beamforming and antenna design for near-field fluid antenna system. IEEE. Wireless. Commun. Lett. 2025, 14, 415-9.
7. Ma, W.; Zhu, L.; Zhang, R. Multi-beam forming with movable-antenna array. IEEE. Commun. Lett. 2024, 28, 697-701.
8. Zhu, L.; Ma, W.; Zhang, R. Modeling and performance analysis for movable antenna enabled wireless communications. IEEE. Trans. Wireless. Commun. 2024, 23, 6234-50.
9. Ye, Y.; You, L.; Wang, J.; Xu, H.; Wong, K. K.; Gao, X. Fluid antenna-assisted MIMO transmission exploiting statistical CSI. IEEE. Commun. Lett. 2024, 28, 223-7.
10. Ma, W.; Zhu, L.; Zhang, R. MIMO capacity characterization for movable antenna systems. IEEE. Trans. Wireless. Commun. 2024, 23, 3392-407.
11. Zhu, L.; Ma, W.; Ning, B.; Zhang, R. Movable-antenna enhanced multiuser communication via antenna position optimization. IEEE. Trans. Wireless. Commun. 2024, 23, 7214-29.
12. Zhu, L.; Ma, W.; Zhang, R. Movable-antenna array enhanced beamforming: achieving full array gain with null steering. IEEE. Commun. Lett. 2023, 27, 3340-4.
13. Hu, G.; Wu, Q.; Ouyang, J.; Xu, K.; Cai, Y.; Al-Dhahir, N. Movable-antenna-array-enabled communications with CoMP reception. IEEE. Commun. Lett. 2024, 28, 947-51.
14. Li, N.; Wu, P.; Ning, B.; Zhu, L. Sum rate maximization for movable antenna enabled uplink NOMA. IEEE. Wireless. Commun. Lett. 2024, 13, 2140-4.
15. Xiao, Z.; Pi, X.; Zhu, L.; Xia, X. G.; Zhang, R. Multiuser communications with movable-antenna base station: joint antenna positioning, receive combining, and power control. IEEE. Trans. Wireless. Commun. 2024, 23, 19744-59.
16. Yang, S.; Lyu, W.; Ning, B.; Zhang, Z.; Yuen, C. Flexible precoding for multi-user movable antenna communications. IEEE. Wireless. Commun. Lett. 2024, 13, 1404-8.
17. Tang, J.; Pan, C.; Zhang, Y.; Ren, H.; Wang, K. Secure MIMO communication relying on movable antennas. IEEE. Wireless. Commun. Lett. 2025, 73, 2159-75.
18. Qin, H.; Chen, W.; Li, Z.; Wu, Q.; Cheng, N.; Chen, F. Antenna positioning and beamforming design for fluid antenna-assisted multi-user downlink communications. IEEE. Wireless. Commun. Lett. 2024, 13, 1073-7.
19. Hu, G.; Wu, Q.; Xu, K.; et al. Fluid antennas-enabled multiuser uplink: a low-complexity gradient descent for total transmit power minimization. IEEE. Commun. Lett. 2024, 28, 602-6.
20. Wang, C.; Li, Z.; Wong, K. K.; Murch, R.; Chae, C. B.; Jin, S. AI-empowered fluid antenna systems: opportunities, challenges, and future directions. IEEE. Wireless. Commun. 2024, 31, 34-41.
21. Jang, S.; Lee, C. New view of learning-aided channel estimation for movable antenna systems. IEEE. Trans. Wireless. Commun. 2025, 24, 5694-708.
22. Tang, X.; Jiang, Y.; Liu, J.; Du, Q.; Niyato, D.; Han, Z. Deep learning-assisted jamming mitigation with movable antenna array. IEEE. Trans. Veh. Technol. 2025, 74, 14865-70.
23. Weng, C.; Chen, Y.; Zhu, L.; Wang, Y. Learning-based joint beamforming and antenna movement design for movable antenna systems. IEEE. Wireless. Commun. Lett. 2024, 13, 2120-4.
24. Fadakar, A.; Mansourian, A.; Akhavan, S. Localization using convolutional neural networks with mobile array. In 2024 IEEE 100th Vehicular Technology Conference (VTC2024-Fall), Washington, USA. October 07-10, 2024. IEEE; 2024. p. 1-5.
25. Mamamed, A.; Bai, Z.; Femi-Philips, O.; et al. Low complexity deep neural network based transmit antenna selection and signal detection in SM-MIMO system. Digit. Signal. Process. 2022, 130, 103708.
26. Tsakiris, M. C.; Peng, L.; Conca, A.; Kneip, L.; Shi, Y.; Choi, H. An algebraic-geometric approach for linear regression without correspondences. IEEE. Trans. Inf. Theory. 2020, 66, 5130-44.
27. Zhang, J.; Liu, W.; Gu, C.; Gao, S. S.; Luo, Q. Multi-beam multiplexing design for arbitrary directions based on the interleaved subarray architecture. IEEE. Trans. Veh. Technol. 2020, 69, 11220-32.
28. Xie, C.; Xiu, Y.; Yang, S.; Zhang, Z. Deep learning for movable antenna precoding in 2D MISO communication system. In 2024 10th International Conference on Computer and Communications (ICCC), Chengdu, China. December 13-16, 2024. IEEE; 2024. pp. 2500-4.
29. Zheng, Q.; Saponara, S.; Tian, X.; Yu, Z.; Elhanashi, A.; Yu, R. A real-time constellation image classification method of wireless communication signals based on the lightweight network MobileViT. Cogn. Neurodyn. 2024, 18, 659-71.
30. Zheng, Q.; Tian, X.; Yu, Z.; et al. MobileRaT: a lightweight radio transformer method for automatic modulation classification in drone communication systems. Drones 2023, 7, 596.
31. Zheng, Q.; Tian, X.; Yu, L.; Elhanashi, A.; Saponara, S. Recent advances in automatic modulation classification technology: methods, results, and prospects. Int. J. Intell. Syst. 2025.
Cite This Article
How to Cite
Download Citation
Export Citation File:
Type of Import
Tips on Downloading Citation
Citation Manager File Format
Type of Import
Direct Import: When the Direct Import option is selected (the default state), a dialogue box will give you the option to Save or Open the downloaded citation data. Choosing Open will either launch your citation manager or give you a choice of applications with which to use the metadata. The Save option saves the file locally for later use.
Indirect Import: When the Indirect Import option is selected, the metadata is displayed and may be copied and pasted as needed.
About This Article
Special Topic
Copyright

Data & Comments
Data
0













Comments
Comments must be written in English. Spam, offensive content, impersonation, and private information will not be permitted. If any comment is reported and identified as inappropriate content by OAE staff, the comment will be removed without notice. If you have any queries or need any help, please contact us at [email protected].