


Figure2
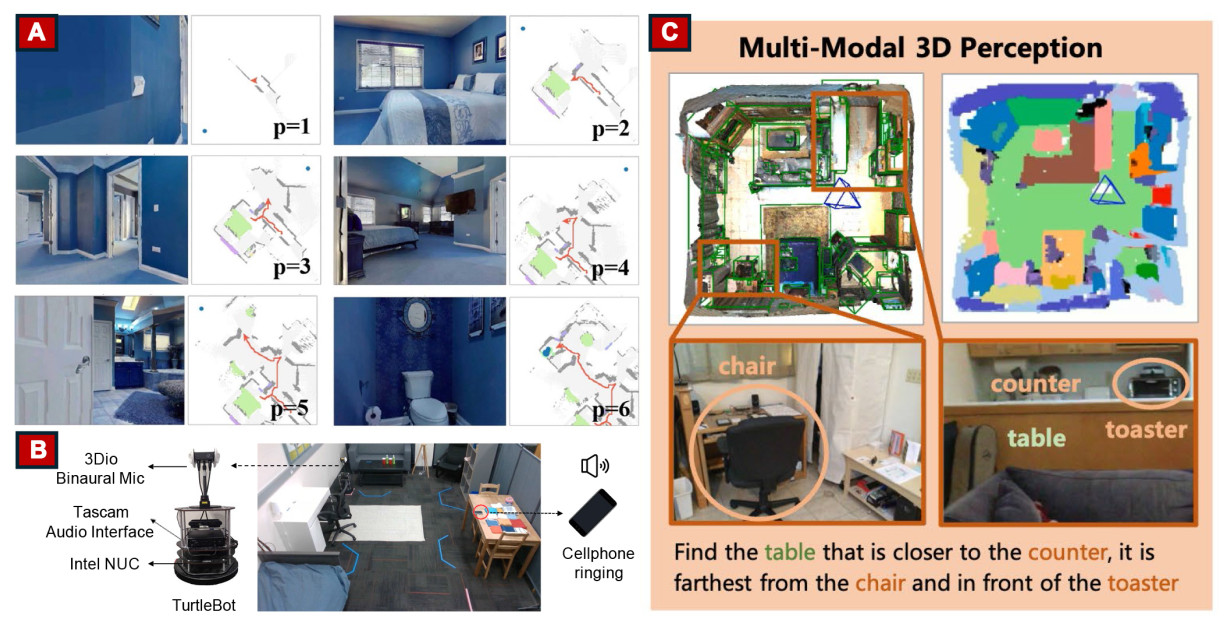
Figure 2. Examples of embodied perception. (A) The first perspective views of perception and bird-eye views of the robot when detecting the environment[92]; (B) TurtleBot platform that can collect both image and voice information[93]; (C) EmbodiedScan that benchmarks language-grounded holistic 3D scene understanding capabilities[94].





