



fig6
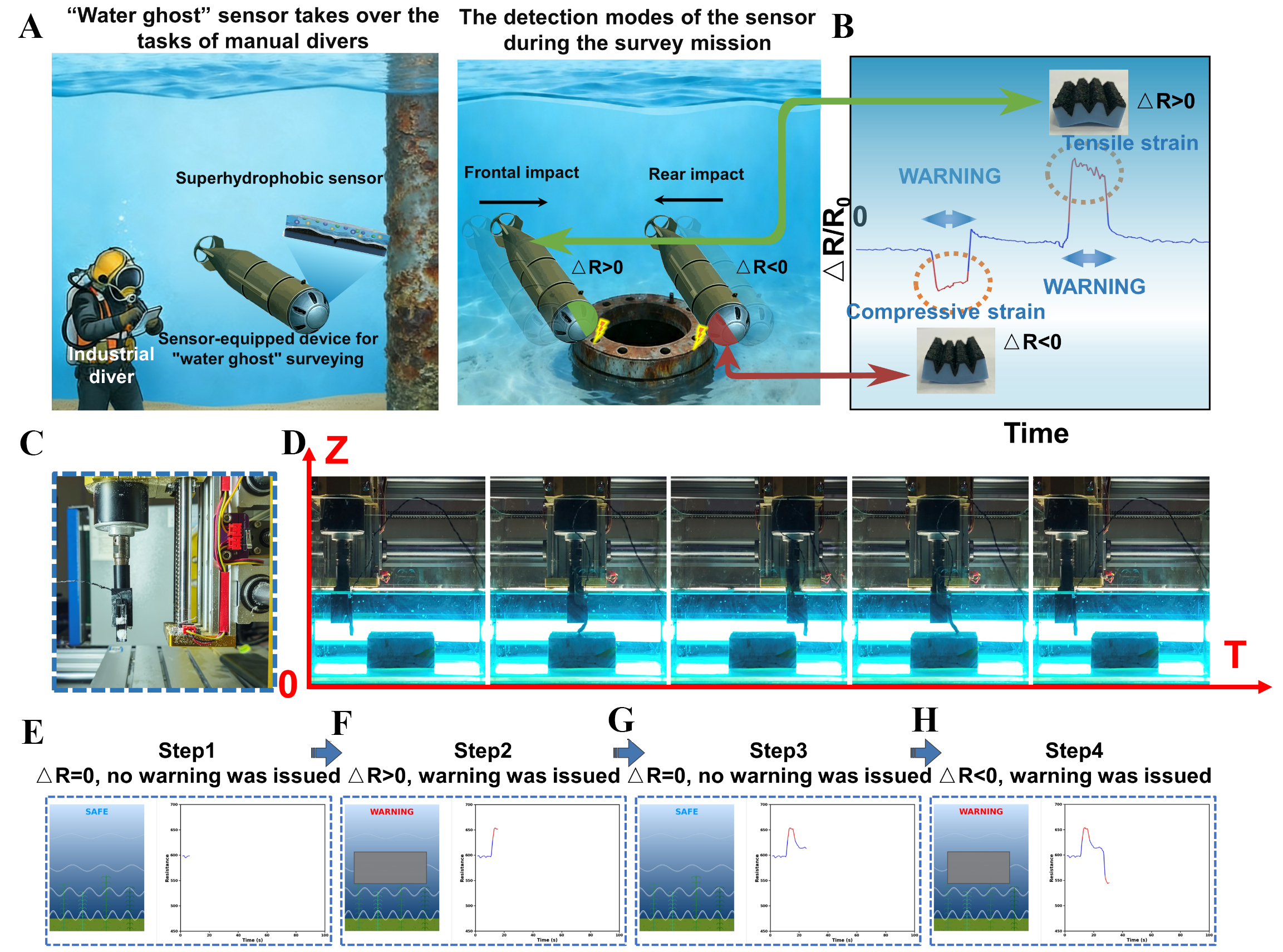
Figure 6. Application of the superhydrophobic sensor as a “aquatic phantom” for intelligent underwater reconnaissance. (A) Schematic of the sensor functioning as a “aquatic phantom” to replace divers. The signal polarity encodes the contact direction as frontal impact induces tension (ΔR > 0) while rear impact induces compression (ΔR < 0); (B) Real-time waveform recording where distinct positive and negative peaks correspond to specific directional collisions; (C and D) Experimental simulation using a programmable engraving machine to precisely control sensor movement, visualized via time-lapse photography along the time axis. The images in (C) and (D) were photographed by the authors; (E-H) real-time demonstration of the sensing process using a Python-based GUI: (e, g) “SAFE” status displayed during noncontact intervals; (F) warning triggered by a negative response (ΔR > 0), indicating outward bending contact; and (H) warning triggered by a positive response (ΔR < 0), indicating inward bending contact. GUI: Graphical user interface.





