



fig4
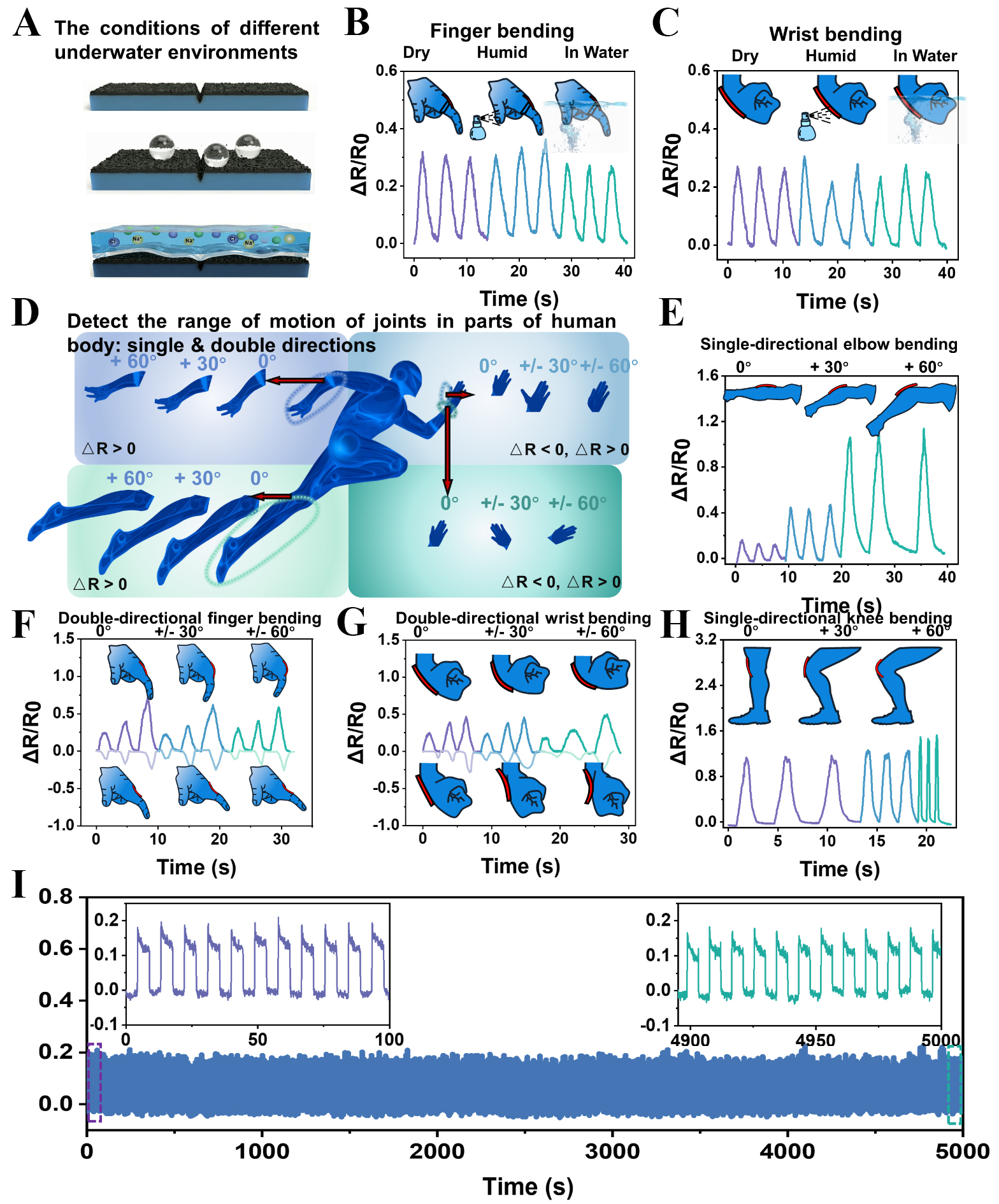
Figure 4. Demonstration of amphibious human-motion monitoring and multidimensional joint recognition. (A) Schematics of the three testing conditions: dry, humid, and fully submerged. Real-time resistance responses of (B) finger and (C) wrist bending under these varying conditions; (D) Schematic mapping of human body joints, categorizing them into unidirectional (elbow, knee) and bidirectional (finger, wrist) kinematic ranges; (E) Elbow and (H) knee bending produce only positive resistance changes, corresponding to outward skin-stretching at varying angles; (F) Finger and (G) wrist bending demonstrating the capability to decouple motion direction as inward flexion triggers a resistance decrease while outward extension triggers a resistance increase. In addition, distinct signal amplitudes corresponding to specific bending angles (0° → ± 30° → ± 60°); (I) Long-term cyclic stability test performed over 500 cycles of continuous bending at 0.1 Hz (± 8°).





