



fig3
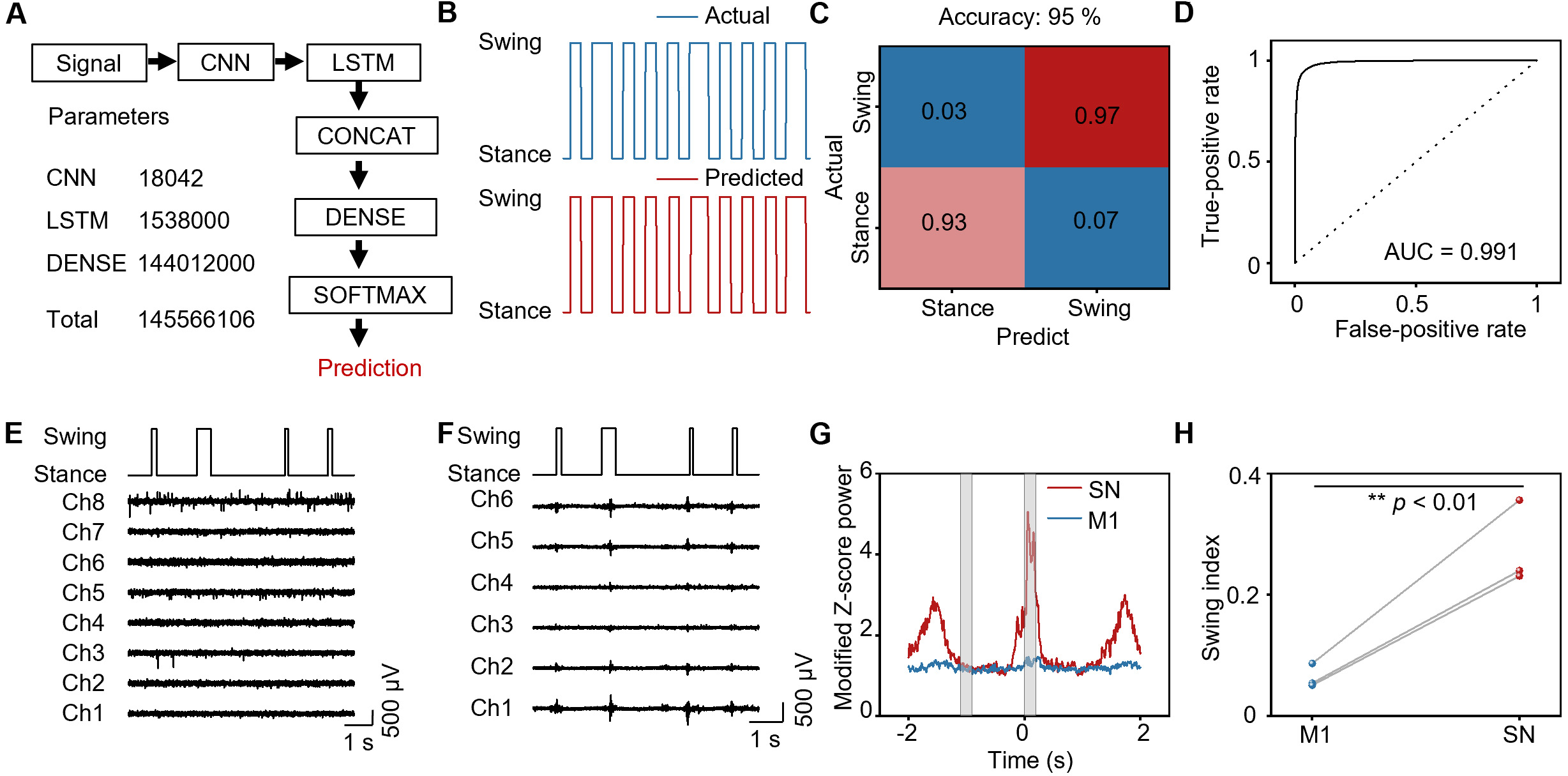
Figure 3. Decoding gait state with signals recorded by the NeuroSyn at 8 weeks post-implantation. (A) The neural network model to predict the locomotion states. The architecture comprises two layers of neural networks: a 1D CNN (convolutional neural network) for extracting local temporal and frequency features, and an LSTM (long short-term memory) network for capturing long-range temporal dependencies. The processed features from both networks are concatenated and then passed through the DENSE layer for combination and transformation. Finally, the model output is converted into a probability distribution via the SOFTMAX function for classification prediction; (B) Prediction of the neural network model, illustrating actual and predicted swing and stance phases; (C) Confusion matrix of gait state decoding; (D) ROC curves calculated from the neural network model; (E) M1 signals recorded by commercial electrodes during locomotion; (F) Sciatic nerve signals recorded by the NeuroSyn during locomotion; (G) Modified Z-score power in M1 and sciatic nerve during locomotion; (H) Swing index in M1 and sciatic nerve during locomotion. In (E) to (H), n = 3 animals in each group. Statistics is analyzed through SPSS (version 27.0), followed by one way ANOVA (*P < 0.05, **P< 0.01, ***P < 0.001). NeuroSyn: A biosynchronized, transient and flexible regenerative peripheral neural interface; 1D: one-dimensional; M1: primary motor cortex; SPSS: statistical product and service solutions; ANOVA: analysis of variance; AUC: area under the curve; SN: sciatic nerve.





