



fig6
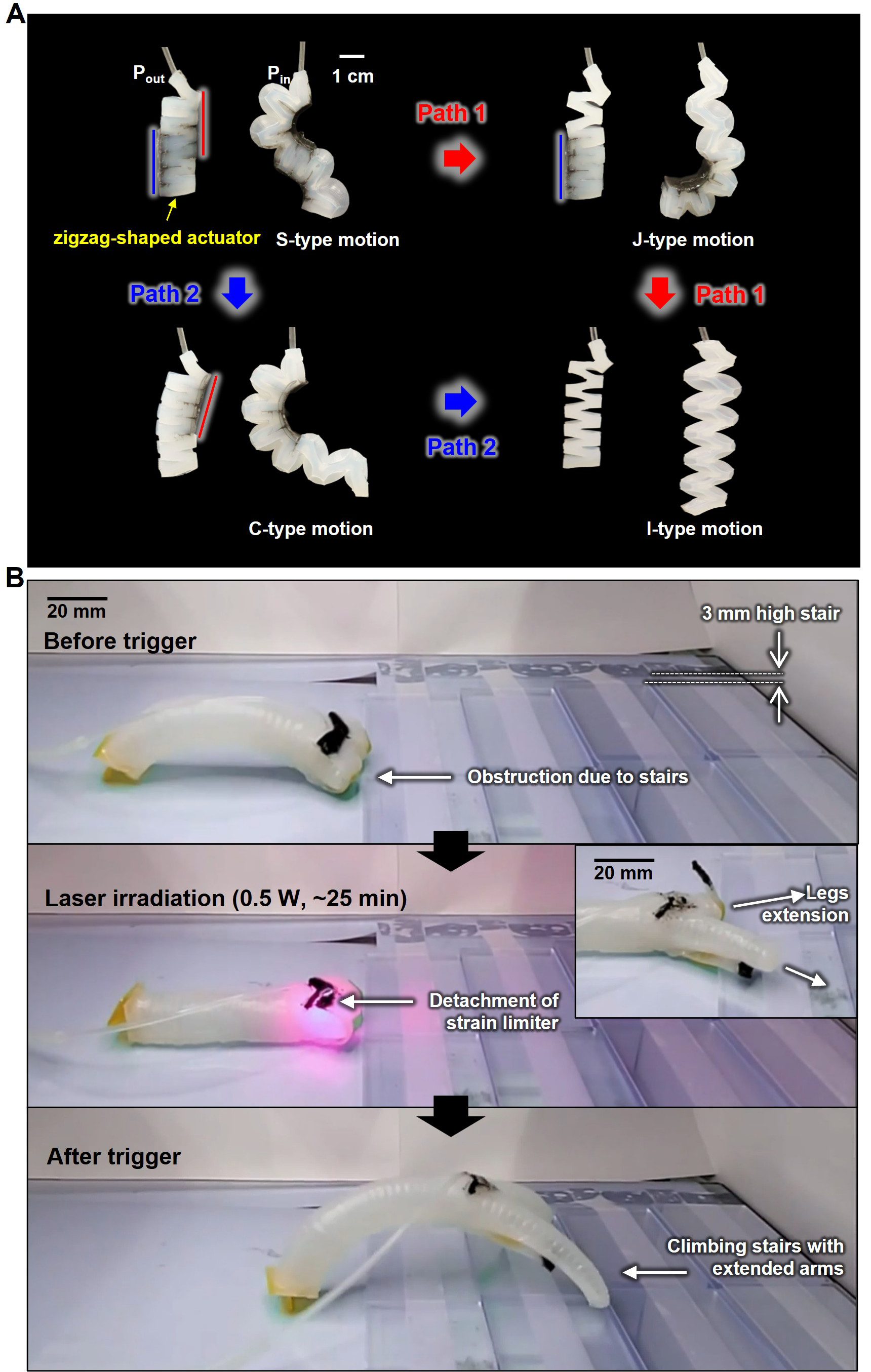
Figure 6. On-demand remote transformation of soft robots. (A) Photographic images of zigzag shape actuation before triggering, J-type actuation after top-right strain limiter triggering, C-type actuation after bottom-left strain limiter triggering, and I-type actuation after full triggering (spot size = 8 mm (diameter), laser power = 0.5 W, λ = 800 nm, pulse width = ~ 100 fs). (B) Image of the legless soft crawler blocked by a 3 mm high step (top). Image showing the midpoint of laser triggering (middle) and leg extension (middle, inset). Image depicting the successful stair climbing of the transformed 2-leg soft crawler (bottom).





