



fig4
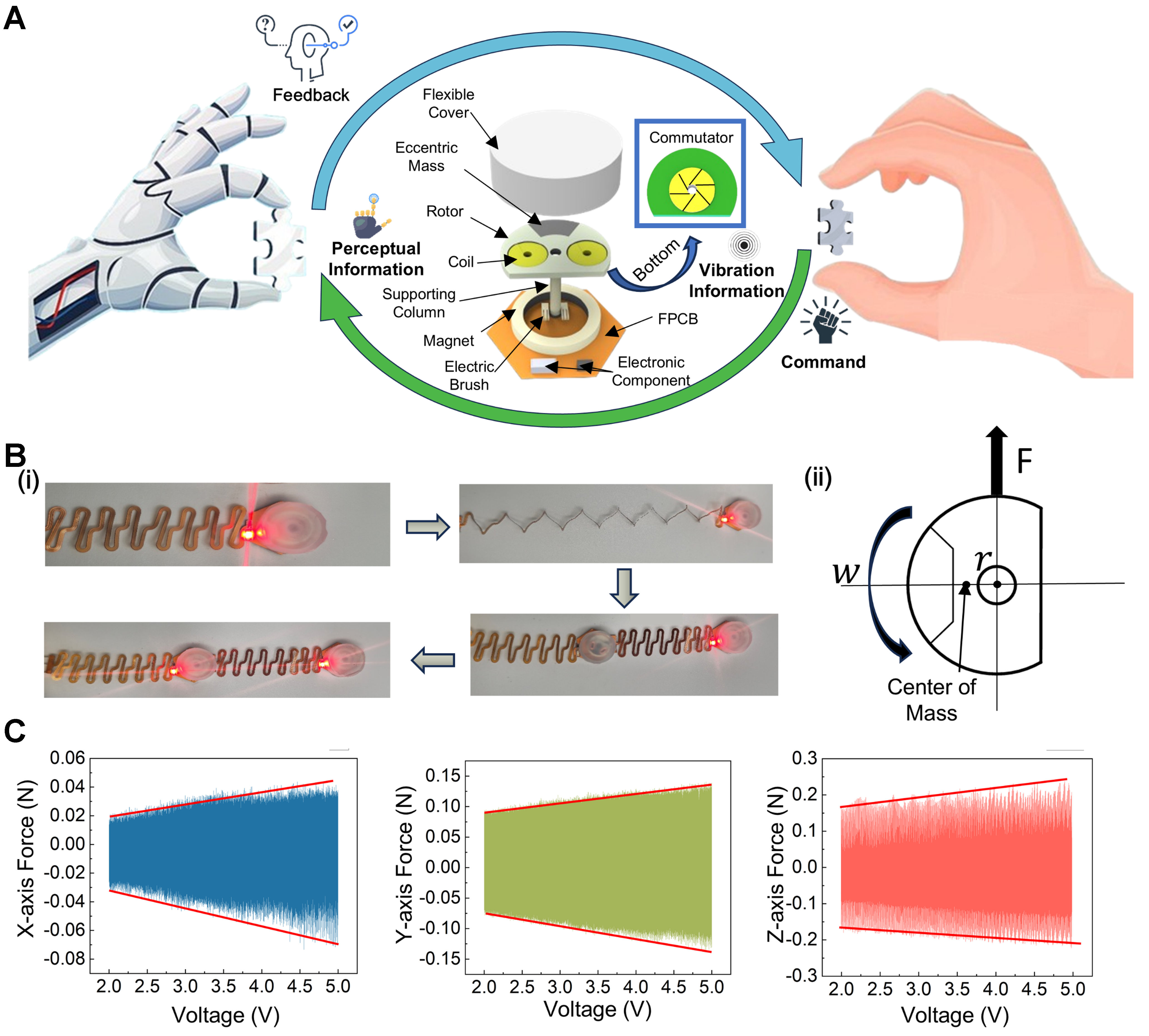
Figure 4. Structure and characterization of the electromagnetic actuator. (A) Exploded view of the electromagnetic actuator; [B(i)] Demonstration of actuator stretchability and modular combination; [B(ii)] Working principle of the actuator; (C) Output of the electromagnetic actuator in the X, Y, and Z directions. (Some image elements are from open-source websites: Pixabay and FreeImages). FPCB: Flexible printed circuit board.





