



fig1
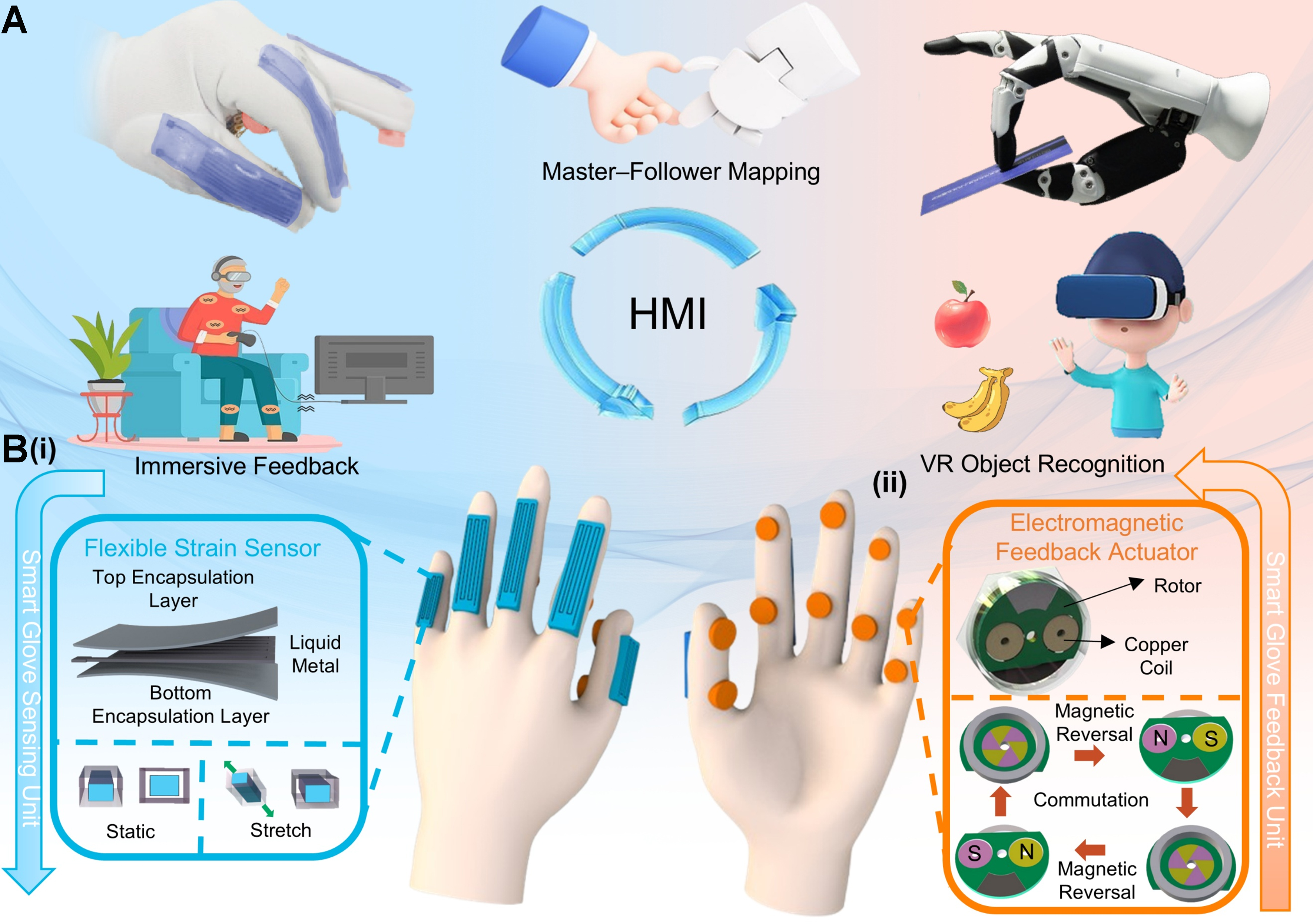
Figure 1. Schematic of the intelligent glove system. (A) Overview of the soft closed-loop wearable glove system; [B(i)] Structural design of the liquid metal strain sensor; [B(ii)] Operating principle of the electromagnetic feedback actuator (Some image elements were either photographed by the authors or obtained from open-source websites: Pixabay and FreeImages). HMI: Human-machine interface; VR: virtual reality.





