



fig4
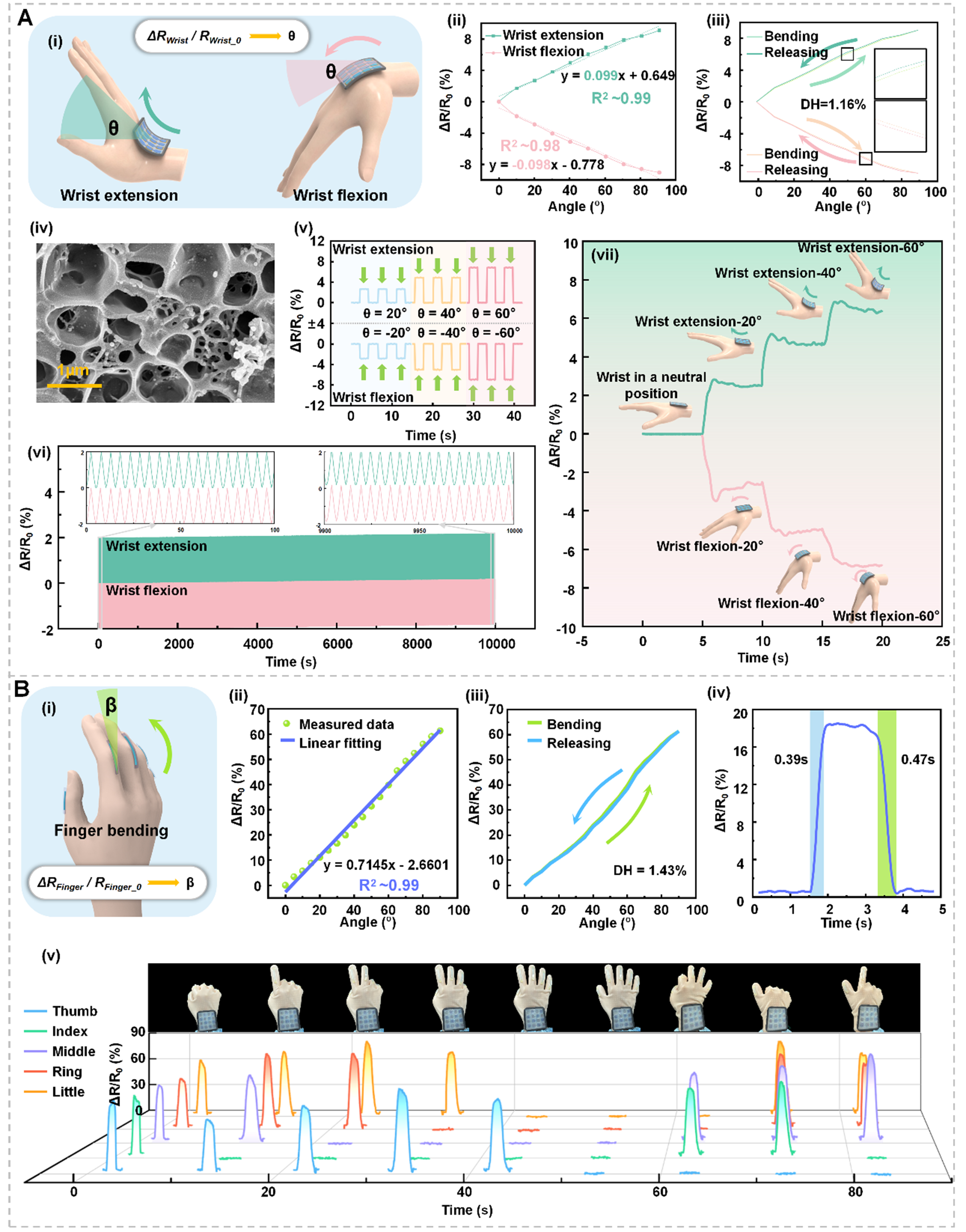
Figure 4. Strain sensing performance of the Touch-Code Glove. (A) (i) Relative resistance change rate of the Wrist-hydrogel under wrist flexion and extension; (ii) Bidirectional linear relationship between bending angle and relative resistance change rate; (iii) Hysteresis behavior of the Wrist-pad within a 90° bending range; (iv) SEM image showing the double-network microstructure of the Wrist-hydrogel; (v) Evaluation of signal stability under simultaneous wrist bending and tactile events; (vi) Repeatability test of wrist bending sensing over 10,000 s; (vii) Stepwise signal response under discrete wrist bending angles; (B) (i) Relative resistance change rate of the Finger-fiber under finger bending; (ii) Linear correlation between finger bending angle and relative resistance change rate; (iii) Hysteresis behavior of the Finger-fiber during cyclic deformation; (iv) Dynamic response characteristics during bending and recovery; (v) Multi-finger gesture recognition using the Finger-fibers, showing distinct signal patterns from the thumb, index, middle, ring, and little fingers. SEM: Scanning electron microscopy; DH: dissipated hysteresis.





