



fig2
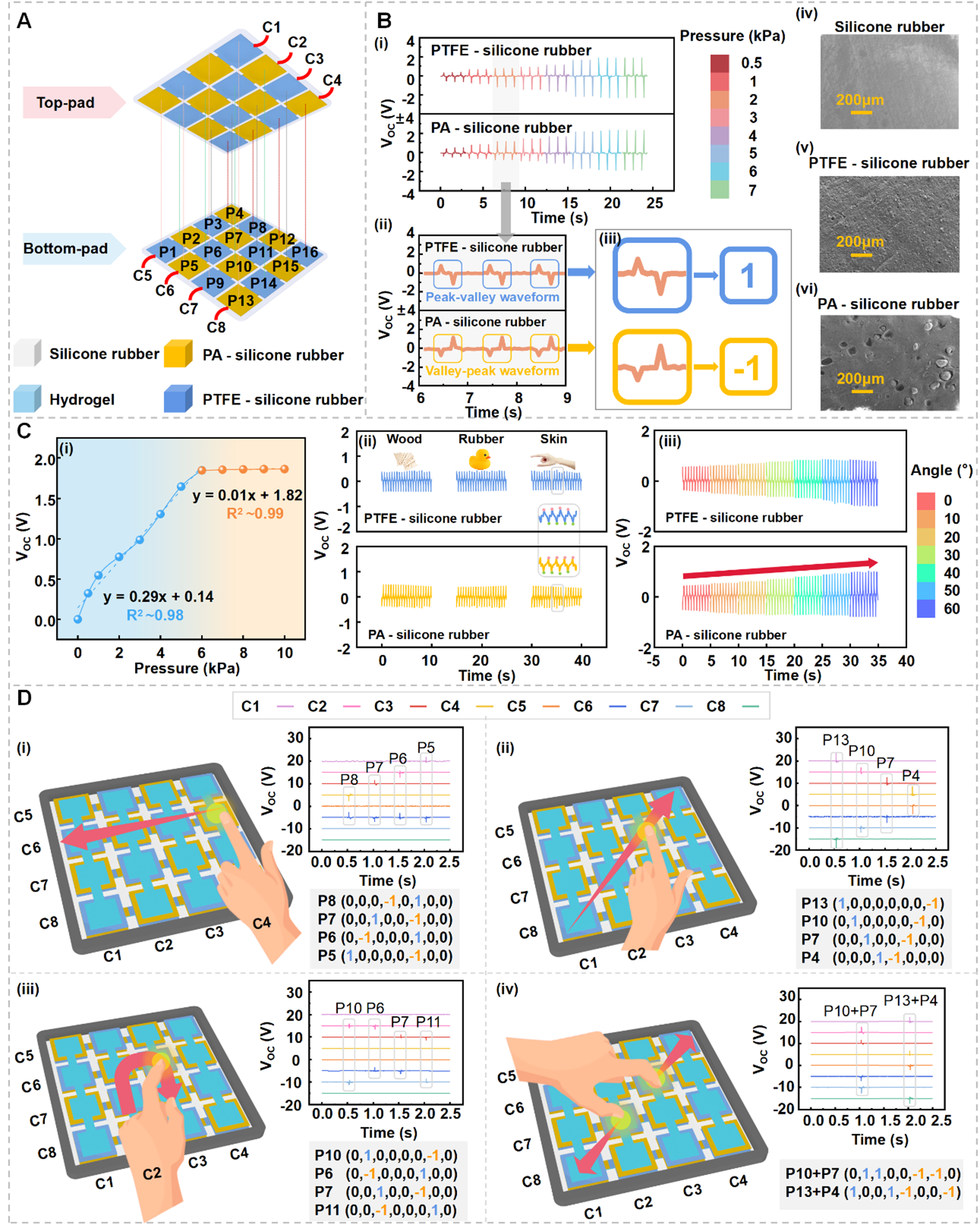
Figure 2. Triboelectric-digital encoding strategy of Touch-Code Glove finger touch interactions. (A) Naming convention for touch points; (B) (i) The open-circuit voltage characteristics of touch point under different contact pressures; (ii) The open-circuit voltage waveform of touch point under a contact pressure of 2 kPa; (iii) An enlarged view of the open-circuit voltage waveforms of touch point under a contact pressure of 2 kPa; (iv)-(vi) Schematic of the SEM images of silicone rubber, PTFE-silicone rubber and PA-silicone rubber; (C) (i) Sensitivity of the touch point; (ii) The open-circuit voltage generated by different materials in contact with the touch point surface; (iii) The open-circuit voltage at 0° to 60° bending angle of the touch point; (D) Schematic illustration of the touch path recognition capability of the Wrist-pad. SEM: Scanning electron microscopy; PTFE: polytetrafluoroethylene; PA: polyamide.





