



fig1
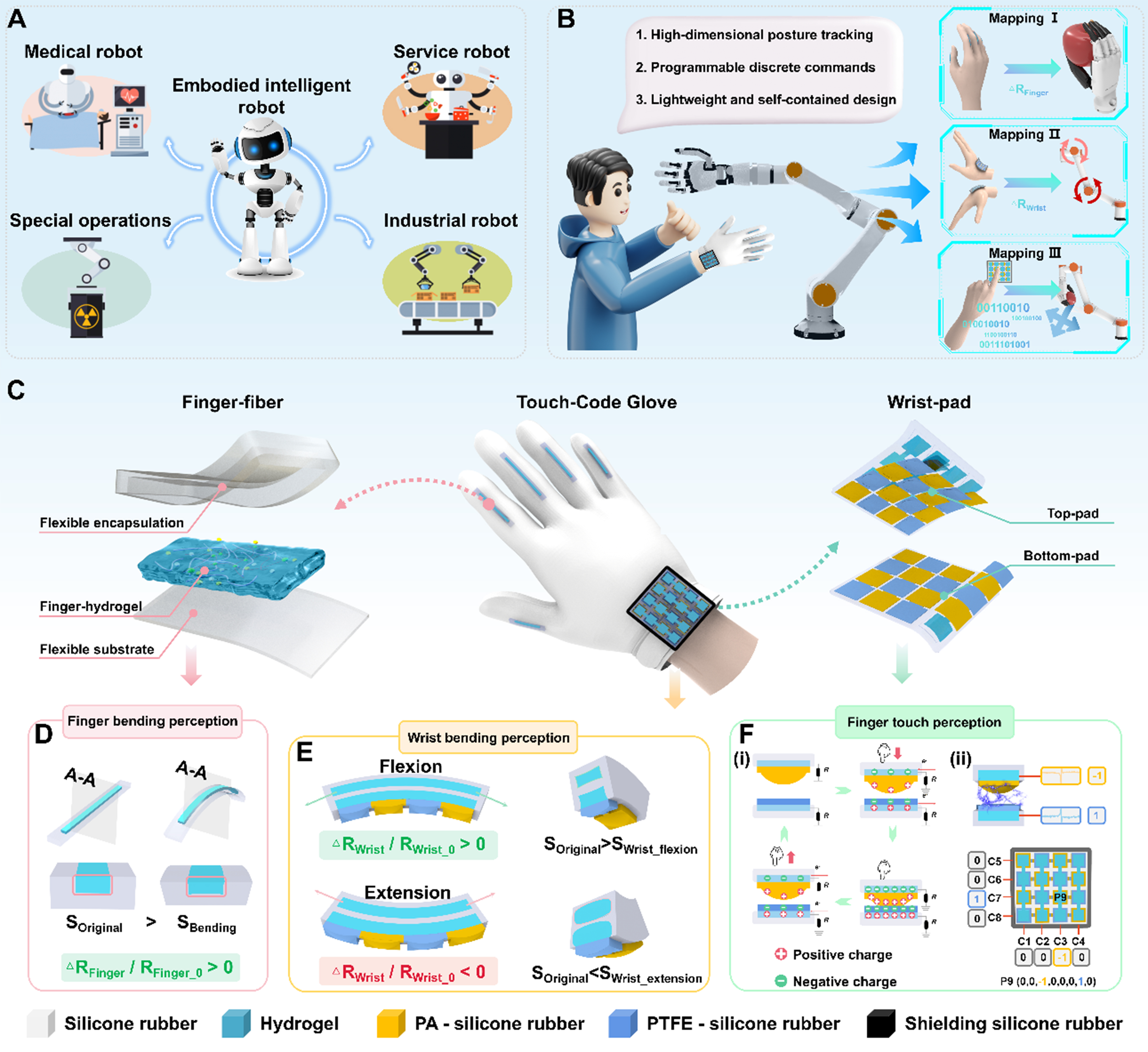
Figure 1. Proposed Touch-Code Glove based on multimodal sensing and triboelectric digital encoding strategy for training embodied intelligent robots. (A) Schematic illustration of the applications of embodied intelligent robots; (B) Schematic illustration of the three proposed mapping strategies of the Touch-Code Glove; (C) Structure of the Touch-Code Glove; (D) Finger bending perception strategy of the Touch-Code Glove; (E) Wrist bending perception strategy of the Touch-Code Glove; (F) Finger touch perception strategy of the Touch-Code Glove. PA: Polyamide; PTFE: polytetrafluoroethylene.





