



fig8
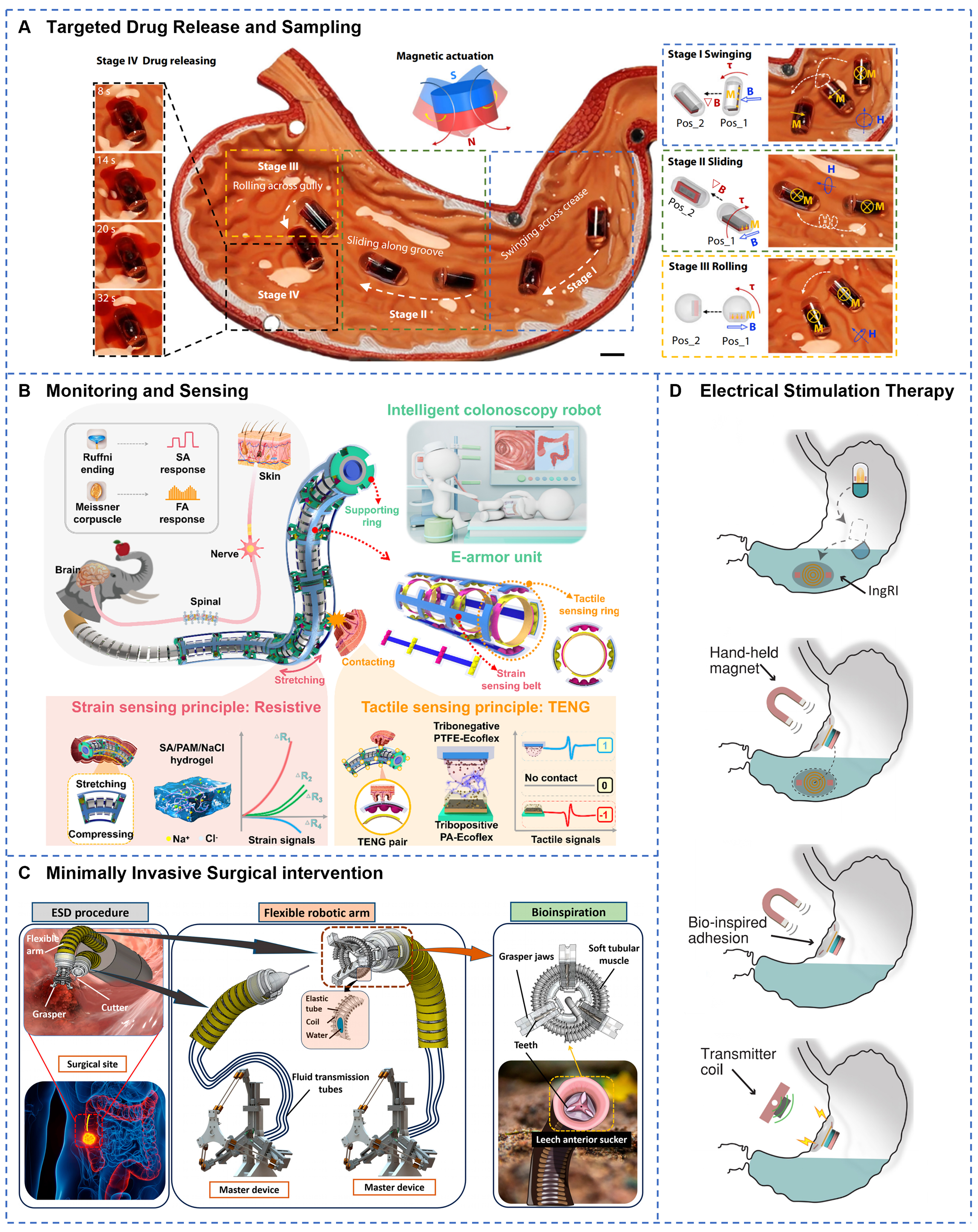
Figure 8. GI soft robots for in vivo information acquisition and minimally invasive therapies. (A) Magnetically actuated capsule robot performs targeted tissue sampling through four-stage operation: swinging, sliding, rolling, and high-frequency magnetic field-triggered drug release. Reprinted with permission from[134]. Copyright 2024, Springer Nature; (B) Triboelectric E-armor system integrates multimodal tactile sensing for real-time detection and acquisition of colonoscopic examination data. Reprinted with permission from[188]. Copyright 2025, Wiley‐VCH; (C) Hydraulic-driven soft endoscopic system features 3-DOF cutting arm and teleoperated grasper for minimally invasive colon lesion manipulation and surgical intervention. Reprinted with permission from[157]. Copyright 2025, Beijing Institute of Technology Press; (D) Ingestible robotic interface delivers programmable electrical stimulation via near-field inductive coupling, adhering to gastric mucosa for chronic neuromodulation therapy. Reprinted with permission from[196]. Copyright 2024, Springer Nature. GI: Gastrointestinal.





