



fig4
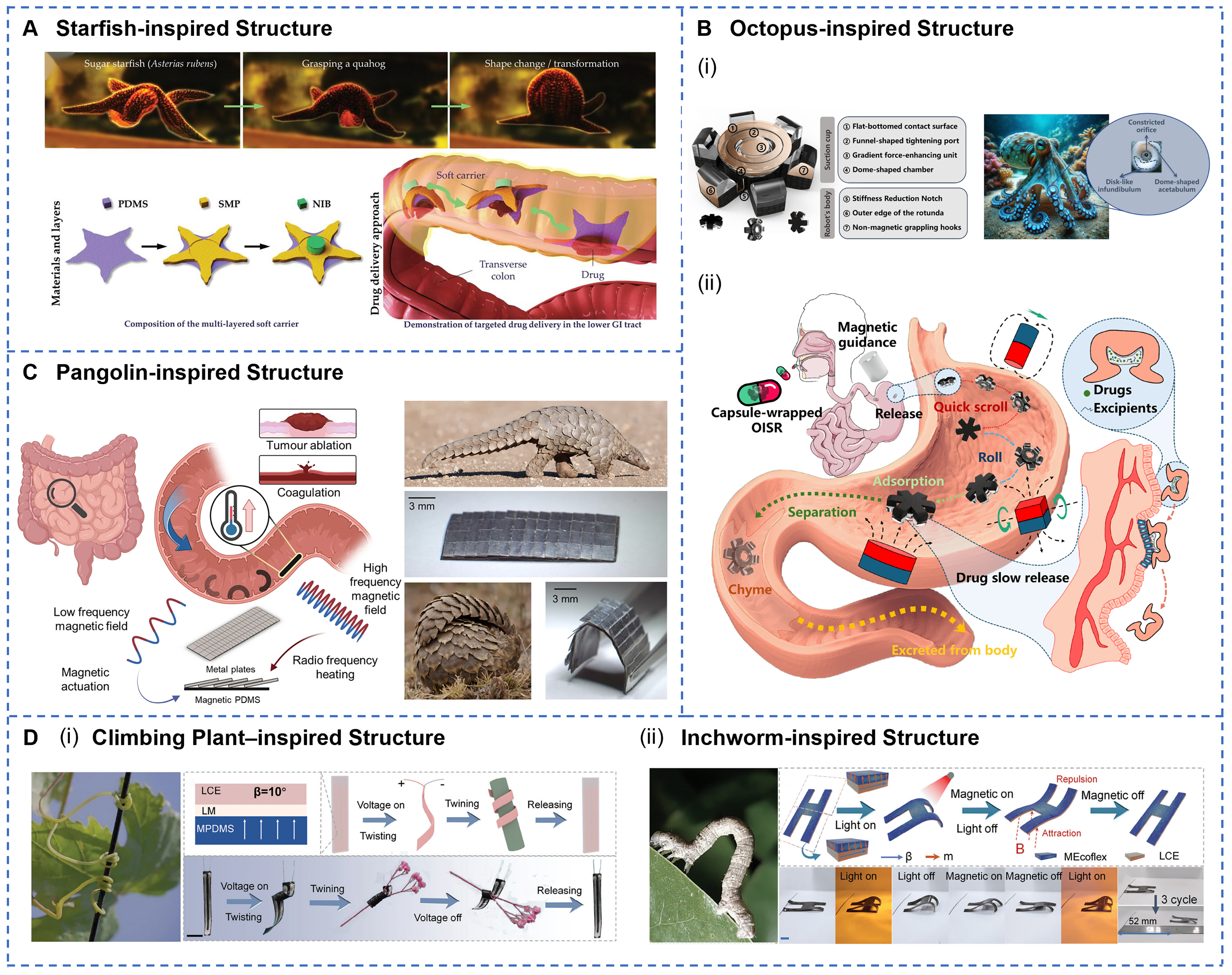
Figure 4. Structural designs to optimize the locomotion, environmental adaptability, and operational capabilities of GI soft robots. (A) Bio-inspired soft carrier with a starfish-mimetic structure, featuring a central disc and radiating arms. Reprinted with permission from[67]. Copyright 2023, Wiley‐VCH; (B) OISR’s biomimetic suction-cup architecture stores drug payloads and employs magnetic-gradient adhesion (i) and multimodal rolling motions for controlled gastric release (ii). Reprinted with permission from[137]. Copyright 2024, MDPI; (C) Pangolin-inspired robot features overlapping metallic scale architecture that enables magnetic field-controlled locomotion while providing Joule heating capabilities exceeding 70 ℃ for therapeutic applications. Reprinted with permission from[138]. Copyright 2023, Springer Nature; (D) Climbing plant-inspired smart tendrils demonstrating flower wrapping (i), alongside a schematic of an inchworm-inspired robot designed for locomotion on flat surfaces (ii). Reprinted with permission from[141]. Copyright 2024, Wiley‐VCH. GI: Gastrointestinal.





