



fig1
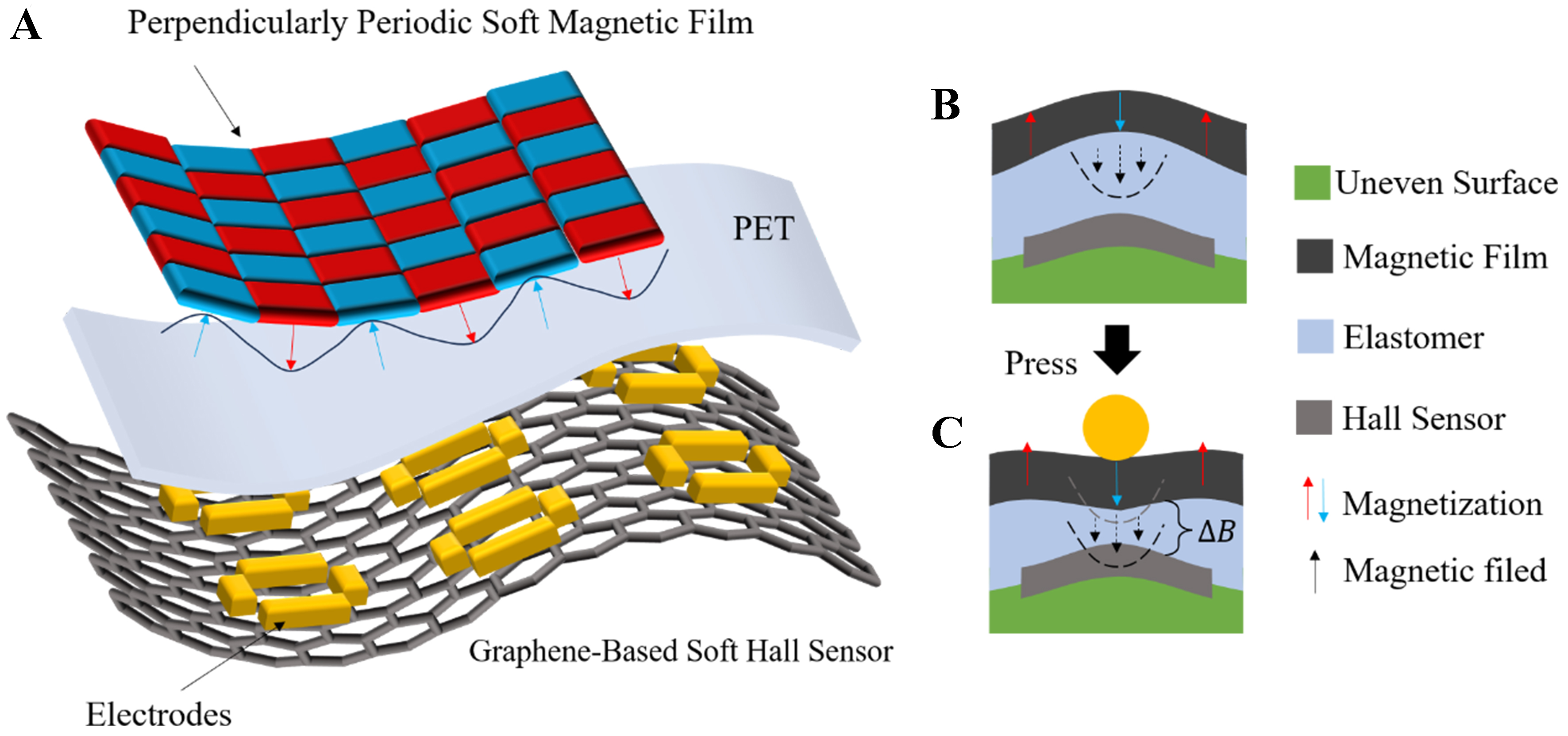
Figure 1. (A) Layer structure of the fully flexible super-resolution tactile sensor: periodically polarized flexible magnetic film, elastomer PET, 3 × 3 Hall sensor electrodes, and graphene substrate; (B) Initial state of the fully flexible Hall sensor; (C) Change in magnetic flux





