



fig9
From: Load-adaptive shape sensing and control of a tendon-driven continuum robot actuated by SMA springs
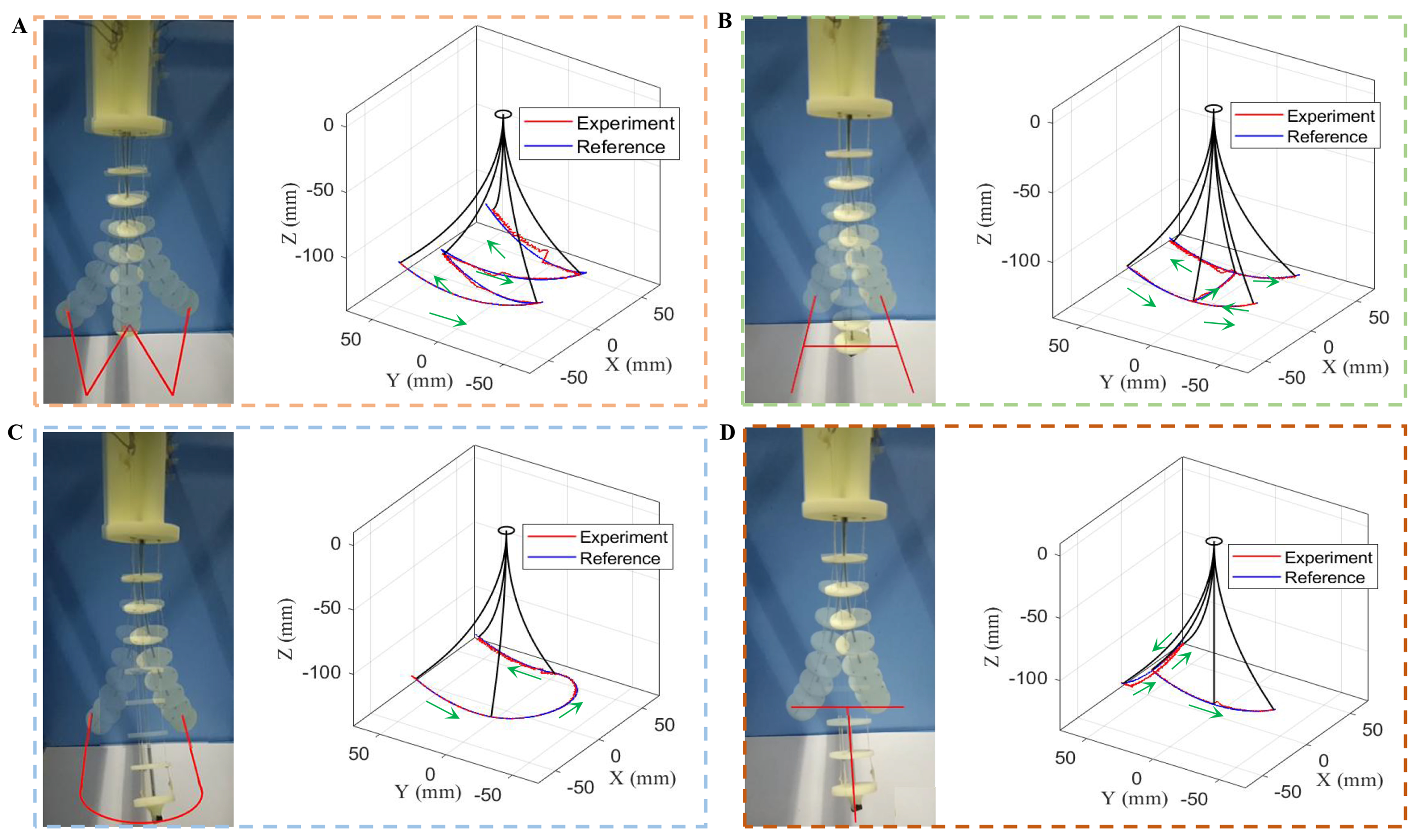
Figure 9. “Letters” trajectory tracking results. (A) “W” tracking performance; (B) “H” tracking performance; (C) “U” tracking performance; (D) “T” tracking performance.





