



fig8
From: Load-adaptive shape sensing and control of a tendon-driven continuum robot actuated by SMA springs
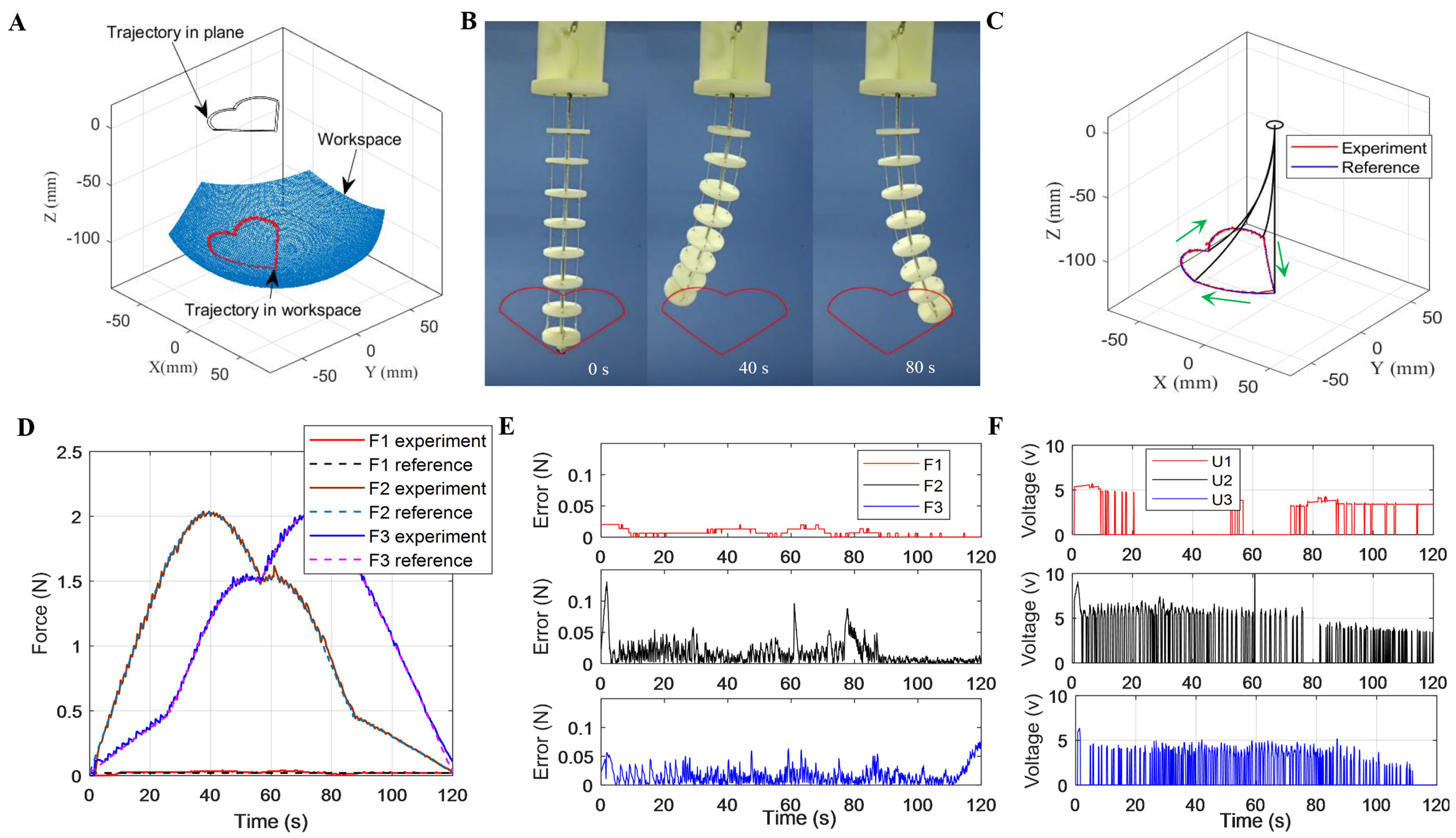
Figure 8. “Heart” trajectory tracking results. (A) Trajectory generation in the workspace; (B) Experimental photos; (C) “Heart” trajectory planning and tracking results; (D) Ratio of the position tracking error to the robot’s length; (E) Tensions of the SMA springs; (F) Tension tracking errors. SMA: Shape memory alloy.





