



fig7
From: Load-adaptive shape sensing and control of a tendon-driven continuum robot actuated by SMA springs
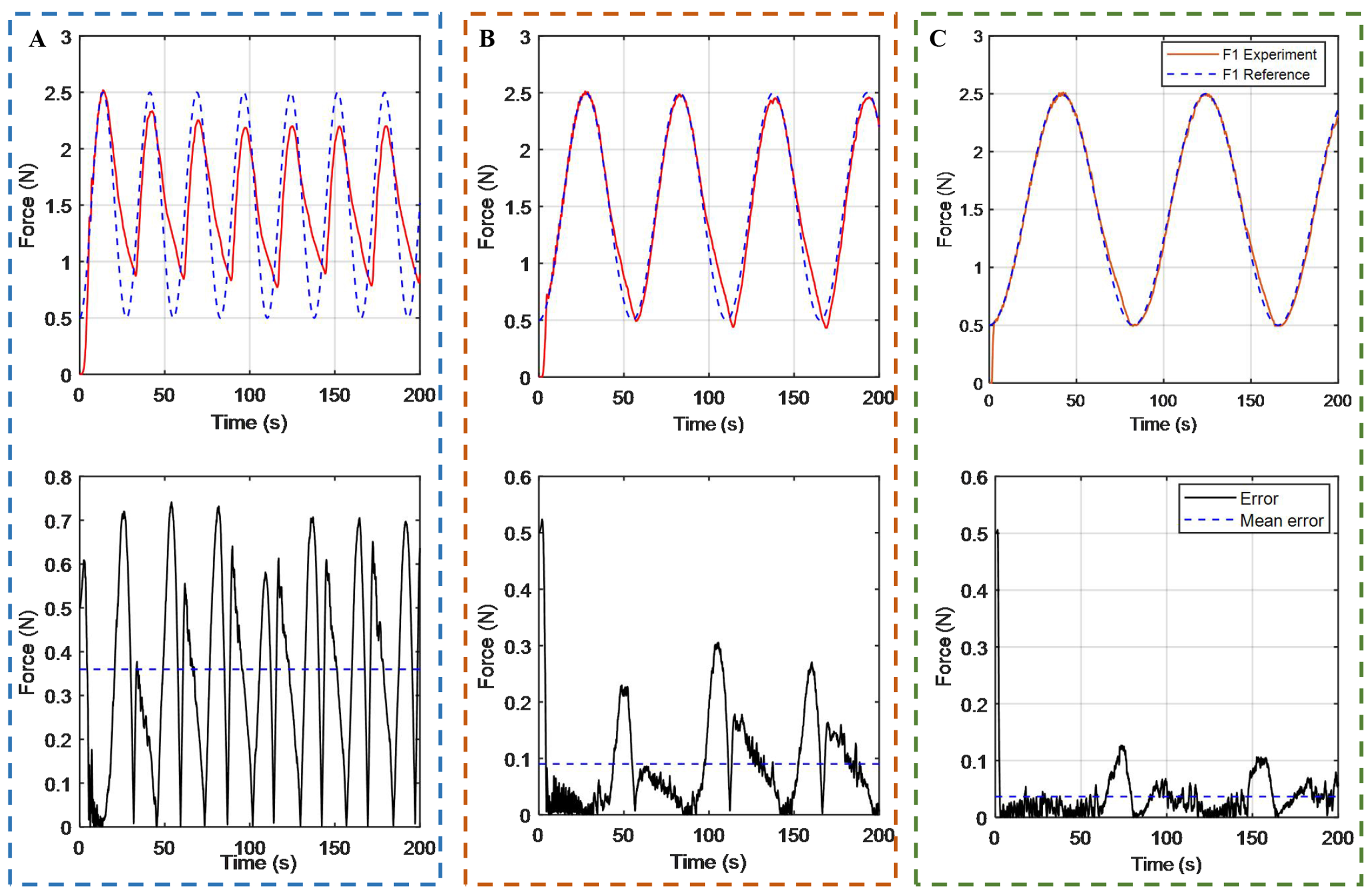
Figure 7. Tension tracking performance and errors at different frequencies. (A) Frequency f = 1/27.6 Hz; (B) Frequency f = 1/55.2 Hz; (C) Frequency f = 1/82.8 Hz.





