



fig6
From: Load-adaptive shape sensing and control of a tendon-driven continuum robot actuated by SMA springs
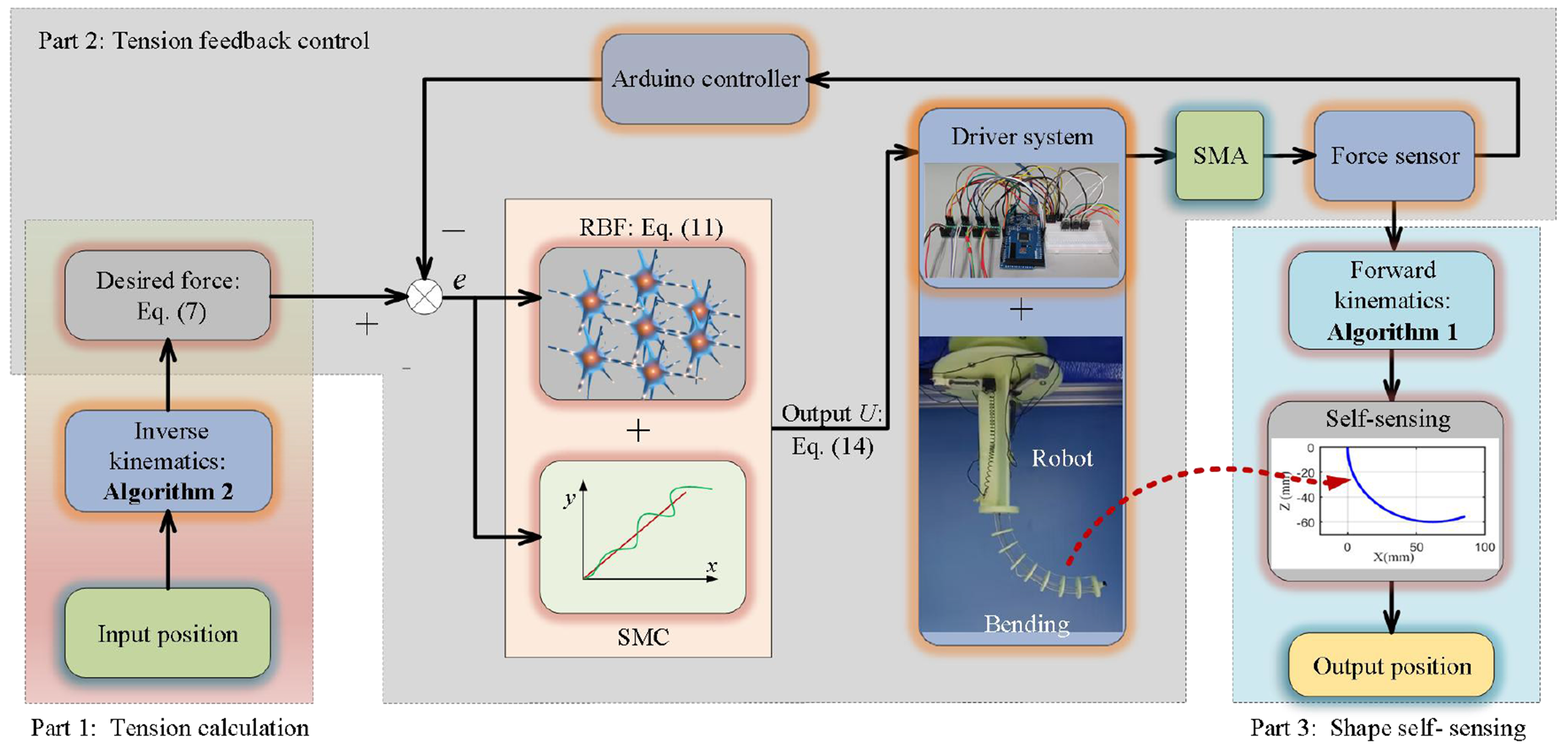
Figure 6. Block diagram of shape sensing and control for the continuum robot.
Figure 6. Block diagram of shape sensing and control for the continuum robot.


All published articles are preserved here permanently:
https://www.portico.org/publishers/oae/


