



fig5
From: Load-adaptive shape sensing and control of a tendon-driven continuum robot actuated by SMA springs
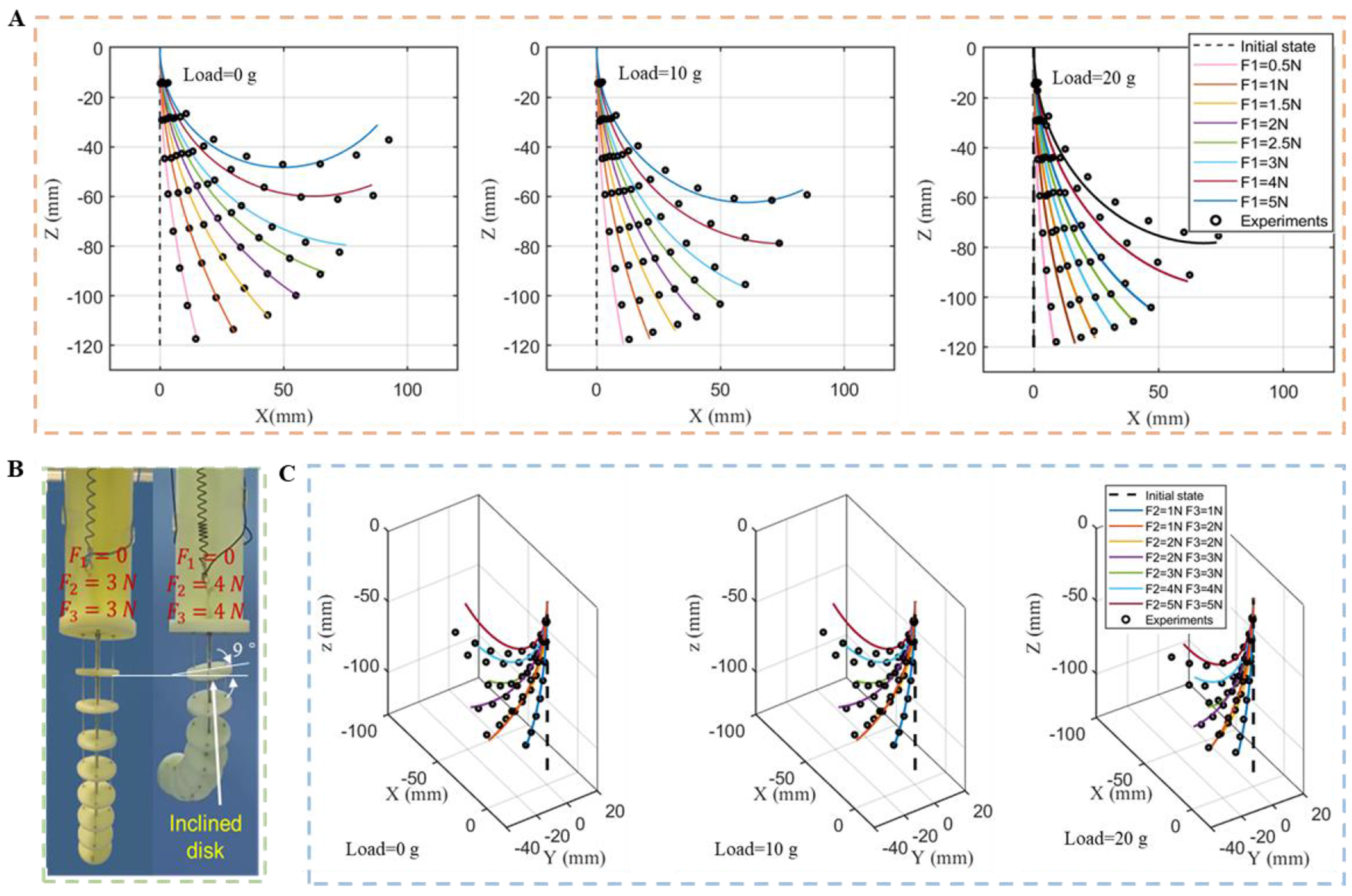
Figure 5. Shape sensing results based on the proposed model when only one or two SMA springs are actuated. (A) Bending in the XOZ plane; (B) Twisting deformation as the tension increases; (C) Bending in three-dimensional space. SMA: Shape memory alloy.





